一种可多自由度活动的机械手的制作方法
本发明属于机器人,涉及一种可多自由度活动的机械手。
背景技术:
1、机械手是在机械化生产过程中发展起来的一种新型装置。基于其不知疲劳、不怕危险且抓举重物的力量比人手力大的特点,越来越广泛地应用于生产和生活中,例如物流运输行业、机加工生产行业等。
2、目前,常用到两种类型的机械手,一是电机驱动机械手,该电动驱动机械手主要是通过电机的驱动,实现指节的拾取和释放动作,但其受到电机尺寸限制,难以实现全部的手部自由度驱动,普遍都为欠驱动机械手,因此,该电机驱动机械手存在着适用范围有限的问题;除此之外,基于电机规格的限制,也使得其提供的扭矩大小有限,因此,仅适于对小扭矩的应用场景;二是线驱动机械手,该线驱动机械手依靠手部各指节连线提供驱动动力,普遍可以设计实现动力源和指节分离。但其仍存在一些缺点,例如:1、基于线传动的连接方式,指节之间的磨损损耗大,维护成本高;2、受制于线传动方式的局限性,其动力传递效率低,难以提供大的扭矩;3.为了实现驱动,该线驱动机械手的结构较为复杂,因此动力学问题难以分析,并且后期维护困难。
3、因此,针对现有技术中机械手存在的适用范围狭窄、无法提高较大扭矩且维护困难的问题,还需要提出一种更为合理的技术方案,以解决当前的技术问题。
技术实现思路
1、本发明的目的是提供一种可多自由度活动的机械手,以解决现有技术中机械手存在的适用范围狭窄、无法提高较大扭矩且维护困难的问题。
2、为了实现上述目的,本发明提供一种可多自由度活动的机械手,包括手掌和至少三根手指,每根手指均间隔设置并分别错落地连接于所述手掌,以形成一定的高差;至少一根手指相对于所述手掌倾斜设置,以能够与其他手指形成于夹角;
3、所述手指包括沿手掌指向指尖方向依次设置的第一指节模块、第二指节模块和第三指节模块;其中,所述第一指节模块的一端可转动地连接于所述手掌,所述第一指节模块的另一端可转动地连接于所述第二指节模块;所述第一指节模块可相对于所述手掌前后俯仰和左右偏摆,以能够调节所述第二指节模块的位置;
4、所述第二指节模块的端部传动地连接于所述第三指节模块,以带动所述第三指节模块前后俯仰运动。
5、在一种可能的设计中,所述第一指节模块包括第一连杆、第一驱动件、第二连杆、第二驱动件、第三连杆、第三驱动件、第二指节和第三指节;
6、所述第一连杆的一端可转动地连接于所述手掌,另一端可转动地连接于所述第二指节;所述第一驱动件的一端可转动地连接于所述手掌,另一端可转动地连接于所述第二指节;当所述第一驱动件伸缩时,带动所述第二指节相对于所述手掌左右偏摆;
7、所述第二连杆的一端可转动地连接于所述第二指节,另一端连接于所述第三指节;所述第二驱动件的一端可转动地连接于所述第二指节,另一端连接于所述第三指节;当所述第二驱动件伸缩时,带动所述第三指节相对于所述手掌前后俯仰;
8、所述第三连杆的一端可转动地连接于所述第三指节,另一端连接于所述第二指节模块;所述第三驱动件的一端可转动地连接于所述第三指节,另一端连接于所述第二指节模块;当所述第三驱动件伸缩时,带动所述第二指节模块相对于所述手掌前后俯仰。
9、在一种可能的设计中,第一连杆配设为两个;第二连杆配设为两个;第三连杆配设为两个。
10、在一种可能的设计中,所述第一驱动件、第二驱动件和第三驱动件均配设为第一液压缸;所述第二指节和所述第三指节均配置为第一基体,所述第一基体包括第一外壳和第一底座,所述第一外壳套接于所述第一底座,以能够完全遮挡所述第一液压缸。
11、在一种可能的设计中,所述底座上设有避让所述液压缸油路的走线孔;所述底座上设有用于避让所述液压缸的伸缩轴的活动孔,所述活动孔配设为条形孔。
12、在一种可能的设计中,所述第二指节模块包括第四连杆、第四驱动件和第四指节,所述第四连杆的一端可转动地连接于所述第一指节模块,另一端可转动地连接于所述第三指节模块;所述第四驱动件的一端可转动地连接于所述第一指节模块,另一端可转动地连接于所述第三指节模块;当所述第四驱动件伸缩时,带动所述第四指节相对于所述手掌前后俯仰。
13、在一种可能的设计中,所述第四驱动件均配设为第二液压缸;所述第四指节均配置为第二基体,所述第二基体包括第二外壳和第二底座,所述第二外壳套接于所述第二底座,以能够完全遮挡所述第二液压缸。
14、在一种可能的设计中,所述第二底座上设有避让所述第二液压缸油路的过线孔;所述第二底座上设有用于避让所述第二液压缸的伸缩轴的位移孔,所述位移孔配设为长条孔。
15、在一种可能的设计中,所述第三指节模块形成为与手指指尖相似的仿形指节,且所述仿形指节上形成有顺滑的曲面。
16、在一种可能的设计中,在至少三根手指中,有一根手指相对于所述手掌倾斜设置,其该手指相对于手掌的倾角为30°~60°。
17、在一种可能的设计中,每根手指的指腹设有防滑部。
18、在一种可能的设计中,该防滑部为凸台、凸点、凹槽、橡胶垫或者硅胶垫。
19、该机械手的工作过程可以概述为:当需要抓取物品时,第一指节模块、第二指节模块和第三指节模块能够呈现出不同的俯仰状态,这样一来,相邻的手指能够以不同的角度曲起,从而呈现出朝向手掌心抓物的状态,有效拾取待拾取物品;而当将物品周转至目标位置后,则是可以使得驱动件控制其伸缩轴收缩,这样一来,可以使相邻的指节逐渐伸展并复位,从而释放物品。由此,即完成对物品的周转工作。
20、通过上述技术方案,可以通过第一指节模块、第二指节模块和第三指节模块来调节握紧程度,基于相邻指节模块之间俯仰的连接方式,可以增大作用范围,突破线传动所带来的局限性,能够提供较大的扭矩,并且结构简单,方便后期进行维护。基于第一指节模块可进行左右偏摆的设计,可以使不同的手指之间能够具有相同或者不同的间距,这样可以根据物品的规格、形状和材质来对手指间的间距进行相应调节,这样,手指在张开张大后,可以有效地拾取物品,具有较好的灵活性,能够适用于不同规格物品的不同取物需求。
技术特征:
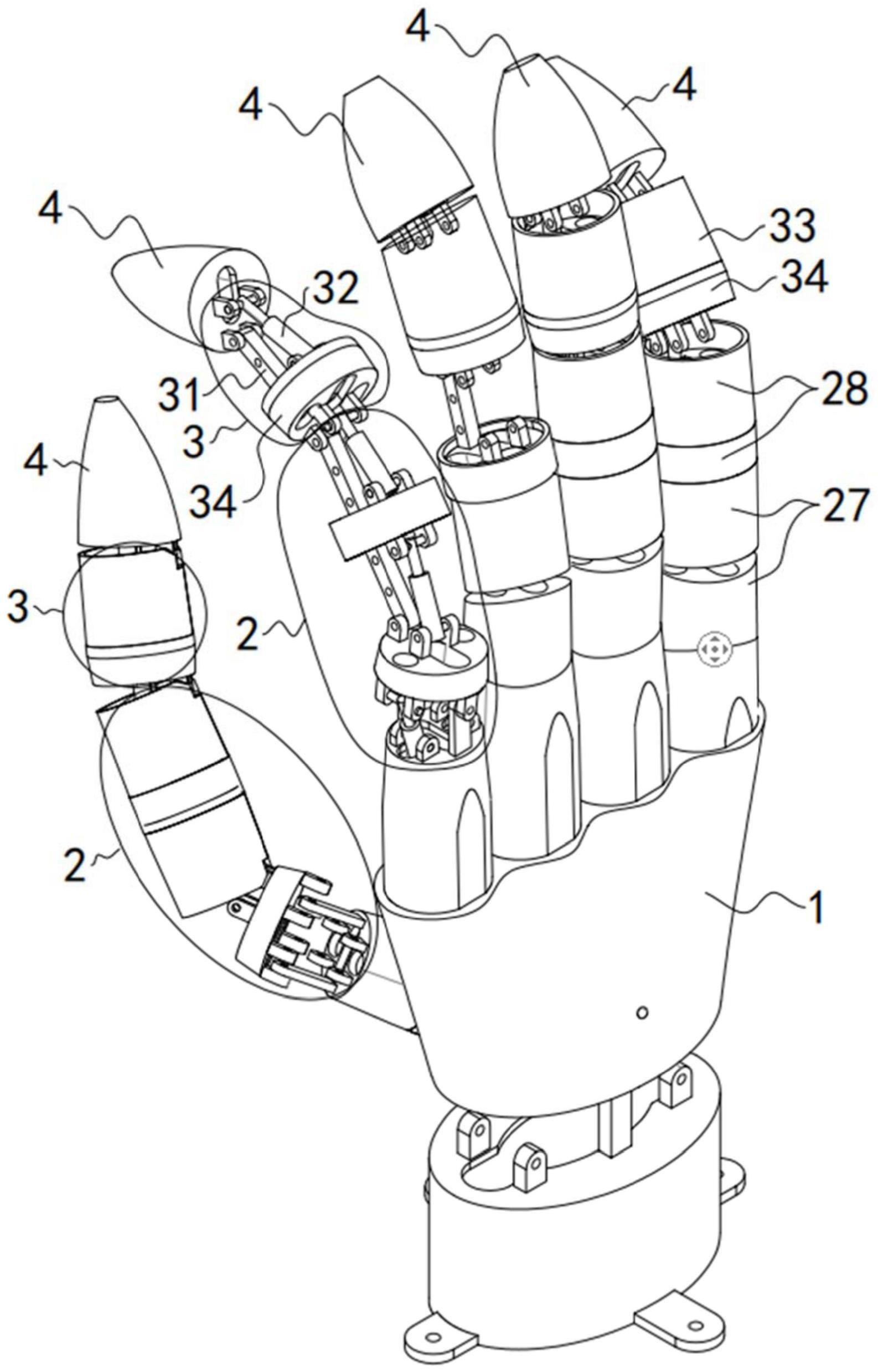
1.一种可多自由度活动的机械手,其特征在于,包括手掌(1)和至少三根手指,每根手指均间隔设置并分别错落地连接于所述手掌(1),以形成一定的高差;至少一根手指相对于所述手掌(1)倾斜设置,以能够与其他手指形成于夹角;
2.根据权利要求1所述的可多自由度活动的机械手,其特征在于,所述第一指节模块(2)包括第一连杆(21)、第一驱动件(22)、第二连杆(23)、第二驱动件(24)、第三连杆(25)、第三驱动件(26)、第二指节(27)和第三指节(28);
3.根据权利要求2所述的可多自由度活动的机械手,其特征在于,第一连杆(21)配设为两个;第二连杆(23)配设为两个;第三连杆(25)配设为两个。
4.根据权利要求2所述的可多自由度活动的机械手,其特征在于,所述第一驱动件(22)、第二驱动件(24)和第三驱动件(26)均配设为第一液压缸;所述第二指节(27)和所述第三指节(28)均配置为第一基体,所述第一基体包括第一外壳和第一底座,所述第一外壳套接于所述第一底座,以能够完全遮挡所述第一液压缸。
5.根据权利要求4所述的可多自由度活动的机械手,其特征在于,所述底座上设有避让所述液压缸油路的走线孔(201);所述底座上设有用于避让所述液压缸的伸缩轴的活动孔(202),所述活动孔(202)配设为条形孔。
6.根据权利要求1所述的可多自由度活动的机械手,其特征在于,所述第二指节模块(3)包括第四连杆(31)、第四驱动件(32)和第四指节,所述第四连杆(31)的一端可转动地连接于所述第一指节模块(2),另一端可转动地连接于所述第三指节模块(4);所述第四驱动件(32)的一端可转动地连接于所述第一指节模块(2),另一端可转动地连接于所述第三指节模块(4);当所述第四驱动件(32)伸缩时,带动所述第四指节相对于所述手掌(1)前后俯仰。
7.根据权利要求6所述的可多自由度活动的机械手,其特征在于,所述第四驱动件(32)均配设为第二液压缸;所述第四指节均配置为第二基体,所述第二基体包括第二外壳(33)和第二底座(34),所述第二外壳(33)套接于所述第二底座(34),以能够完全遮挡所述第二液压缸。
8.根据权利要求7所述的可多自由度活动的机械手,其特征在于,所述第二底座(34)上设有避让所述第二液压缸油路的过线孔;所述第二底座(34)上设有用于避让所述第二液压缸的伸缩轴的位移孔,所述位移孔配设为长条孔。
9.根据权利要求1所述的可多自由度活动的机械手,其特征在于,所述第三指节模块(4)形成为与手指指尖相似的仿形指节,且所述仿形指节上形成有顺滑的曲面。
10.根据权利要求1~9中任一项所述的可多自由度活动的机械手,其特征在于,在至少三根手指中,有一根手指相对于所述手掌(1)倾斜设置,其该手指相对于手掌(1)的倾角为30°~60°。
技术总结
本发明涉及一种可多自由度活动的机械手。该机械手包括手掌和至少三根手指,每根手指均间隔设置并分别错落地连接于手掌;至少一根手指相对于手掌倾斜设置,以能够与其他手指形成于夹角;手指包括沿手掌指向指尖方向依次设置的第一指节模块、第二指节模块和第三指节模块;第一指节模块的一端可转动地连接于手掌,第一指节模块的另一端可转动地连接于第二指节模块;第一指节模块可相对于手掌前后俯仰和左右偏摆,以能够调节第二指节模块的位置;第二指节模块的端部传动地连接于第三指节模块,以带动第三指节模块前后俯仰运动。由此,解决了现有技术中机械手存在的适用范围狭窄、无法提高较大扭矩且维护困难的问题。
技术研发人员:彭道杰
受保护的技术使用者:彭道杰
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!