用于机器人的防碰撞系统及机器人的制作方法
本发明涉及机器人,尤其是一种用于机器人的防碰撞系统及机器人。
背景技术:
1、目前自主移动的智能机器人普遍应用于各种场景,其不受人控制,依靠自身多种传感器,定位器及其软件算法加持,具有自主判断,自主避让,自主导航等功能。机器人运行的可靠性,安全性,及对物,尤其是对于人的安全性应当受到高度重视。而作为最后一道防线的碰撞传感器起到了极其重要的作用。
2、碰撞传感器应用于多种场合,在智能移动设备领域应用广泛。家用扫地机器人等小型移动设备由于其质量轻,碰撞传感器较灵敏,但行程短,不能承受较大冲击。某些体积大,重量大的商用机器人,其碰撞传感器触发力度大,不灵敏,存在对于无固定的较轻障碍物无法触发的风险,且与人体碰撞易对人体产生伤害。一些现有的橡胶材质条状的碰撞传感器,其外观单一,与智能设备整体外观不能很好的融合。
3、基于此,亟需一种用于机器人的防碰撞系统,以解决现有技术中存在的问题。
技术实现思路
1、为了解决上述问题,本发明的目的在于提供用于机器人的防碰撞系统及机器人。
2、一方面,提供一种用于机器人的防碰撞系统,包括两碰撞组件,分别安装于所述机器人行进方向的前方和后方,且每一碰撞组件包括:
3、碰撞壳体,所述碰撞壳体设置于所述机器人的外壳外侧,
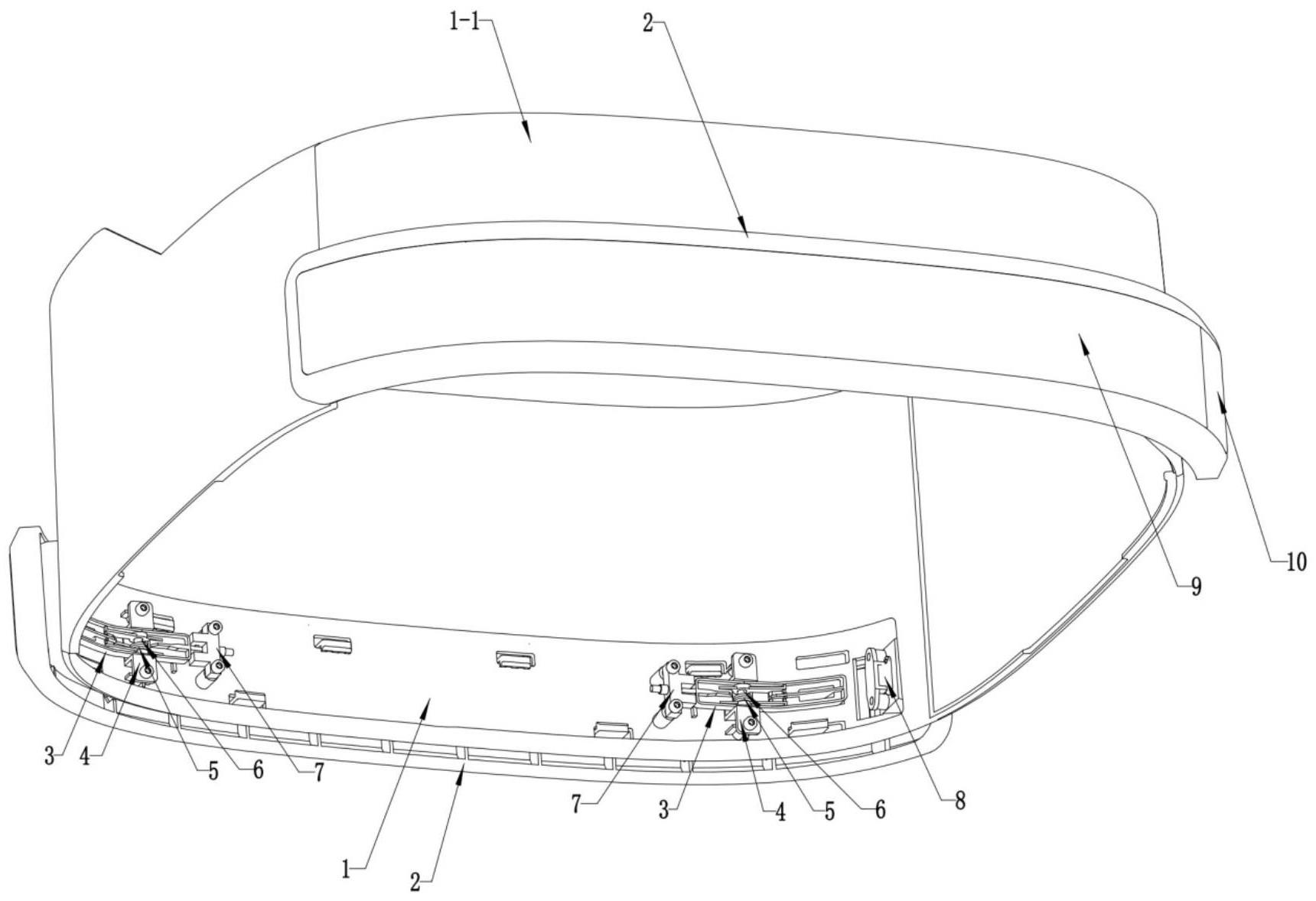
4、至少一碰撞开关组件,所述碰撞开关组件设置于所述机器人的外壳内侧的外围最大位置,且所述碰撞开关组件包括碰撞感应模块以及开关模块;其中,碰撞感应模块的部分透过所述机器人外壳的镂空位置与碰撞壳体内侧相接触;所述开关模块为光敏开关以及挡片;当所述碰撞感应模块感应到碰撞时,挡片不遮挡光敏开关,触发所述机器人进行防碰撞避让。
5、在一些实施方式中,所述碰撞感应模块包括拐臂、支架、复位弹簧以及轴销;其中,
6、所述支架固定于所述机器人的外壳内侧;所述拐臂和复位弹簧通过所述轴销固定于所述支架上;
7、所述复位弹簧的一端支脚卡在所述拐臂内,另一端支脚卡在所述机器人的外壳,并使所述拐臂具有旋转复位力;
8、所述拐臂绕着轴销转动,且一端设置所述挡片,另一端设置与所述碰撞壳体内侧相接触的凸起结构;在无外力的情况下,所述凸起结构始终处于凸出状态且所述挡片遮挡光敏开关;所述凸起结构受到外力后,所述拐臂绕着轴销转动使所述挡片不在遮挡光敏开关。
9、在一些实施方式中,所述碰撞壳体的外侧设置有软胶。
10、在一些实施方式中,所述碰撞开关组件为两个,且两个碰撞开关组件分别位于所述碰撞壳体的两侧,可单独触发也可同时触发。
11、在一些实施方式中,所述防碰撞系统还包括多个传感器,所述多个传感器设置于所述碰撞壳体上,用于识别侧边障碍物以避免碰撞。
12、在一些实施方式中,所述多个传感器外部罩设有透镜。
13、在一些实施方式中,所述碰撞壳体通过卡合结构设置于所述机器人的外壳,且所述卡合结构具有导向作用,以使所述碰撞壳体具有前后运动量。
14、一方面,提供一种机器人,包括有上述所述的用于机器人的防碰撞系统。
15、本发明提供的用于机器人的防碰撞系统,安装在机器人行进方向的前方和后方,全面覆盖机器人所有行进时碰触外界的可能,独特的设计,具有结构简单,触发压力小,反应灵敏等优点。
技术特征:
1.一种用于机器人的防碰撞系统,其特征在于,包括两碰撞组件,分别安装于所述机器人行进方向的前方和后方,且每一碰撞组件包括:
2.如权利要求1所述的用于机器人的防碰撞系统,其特征在于,所述碰撞感应模块包括拐臂、支架、复位弹簧以及轴销;其中,
3.如权利要求1所述的用于机器人的防碰撞系统,其特征在于,所述碰撞壳体的外侧设置有软胶。
4.如权利要求1所述的用于机器人的防碰撞系统,其特征在于,所述碰撞开关组件为两个,且两个碰撞开关组件分别位于所述碰撞壳体的两侧,可单独触发也可同时触发。
5.如权利要求1所述的用于机器人的防碰撞系统,其特征在于,所述防碰撞系统还包括多个传感器,所述多个传感器设置于所述碰撞壳体上,用于识别侧边障碍物以避免碰撞。
6.如权利要求5所述的用于机器人的防碰撞系统,其特征在于,所述多个传感器外部罩设有透镜。
7.如权利要求1所述的用于机器人的防碰撞系统,其特征在于,所述碰撞壳体通过卡合结构设置于所述机器人的外壳,且所述卡合结构具有导向作用,以使所述碰撞壳体具有前后运动量。
8.一种机器人,其特征在于,包括有权利要求1至7中任一项所述的用于机器人的防碰撞系统。
技术总结
本发明公开一种用于机器人的防碰撞系统及机器人。防碰撞系统包括两碰撞组件,分别安装于机器人行进方向的前方和后方,且每一碰撞组件包括:碰撞壳体,碰撞壳体设置于机器人的外壳外侧;至少一碰撞开关组件,碰撞开关组件设置于机器人的外壳内侧的外围最大位置,且碰撞开关组件包括碰撞感应模块以及开关模块;其中,碰撞感应模块的部分透过机器人外壳的镂空位置与碰撞壳体内侧相接触;开关模块为光敏开关以及挡片;当碰撞感应模块感应到碰撞时,挡片不遮挡光敏开关,触发机器人进行防碰撞避让。本发明安装在机器人行进方向的前方和后方,全面覆盖机器人所有行进时碰触外界的可能,独特的设计,具有结构简单,触发压力小,反应灵敏等优点。
技术研发人员:请求不公布姓名,李宇浩
受保护的技术使用者:麦岩智能科技(北京)有限公司
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!