机器臂系统及其定位校正方法与流程
本发明涉及机器臂技术,尤其涉及机器臂系统及其定位校正方法。
背景技术:
1、随着自动化技术的发展,配合有光学视觉系统的机器臂(例如eih(eye in hand)机器臂)已被逐渐使用于工厂的自动化运行(例如零件的自动化组装)。机器臂具有高重复精度的优点,并适合使用于高重复性的工作。待组装的物体(于后称为待组物)一般是随机摆放的,因此配合有光学视觉系统(例如相机)的机器臂可以是通过相机对待组物进行取像及影像处理,以识别出待组物的位置。然而,若机器臂未得知其与相机之间的位置关系,则可能造成机器臂无法通过相机识别出待组物的位置,进而无法将待组物进行组装。因此,一般会对机器臂进行手眼校正(hand-eye calibration),以使机器臂获得其与相机之间的位置关系。
2、在进行手眼校正时,一般通过相机在固定的拍摄位置对具有特定规格的模板图形(例如棋盘图形)的标定板进行取像,以计算出相机与标定板之间的位置关系。接着,根据此位置关系进行一些运算,以计算出机器臂与相机之间的位置关系。然而,由于模板图形是需客制化的,因此制作标定板需花费较多的成本。为了维持所计算出的机器臂与相机之间的位置关系的精准度,标定板及模板图形的尺寸需随着相机的取像范围及分辨率而改变。再者,模板图形的清晰度及标定板的平整性皆会影响所计算出的机器臂与相机之间的位置关系的精准度。此外,由于标定板在相机所取像出的影像中是形成面图案,因此若机器臂改变姿态时,可能造成标定板无法被相机取像。
技术实现思路
1、鉴于上述,本发明提出一种机器臂系统及其定位校正方法。机器臂系统包含一特征装置、一机器臂装置、一控制装置及一摄影装置。机器臂装置包含一基座及一自由端。控制装置用以控制机器臂装置于一第一姿态及不同于第一姿态的一第二姿态。摄影装置位于自由端,用以在第一姿态下,分别于位于一第一平面上的多个第一拍摄位置获取包括特征装置的多个第一特征影像,并在第二姿态下,分别于位于一第二平面上的多个第二拍摄位置获取包括特征装置的多个第二特征影像。控制装置控制机器臂装置移动自由端,以带动摄影装置至该多个第一拍摄位置及该多个第二拍摄位置。控制装置用以根据该多个第一拍摄位置及该多个第一特征影像,取得在第一姿态下,摄影装置与特征装置之间的一第一位置关系;根据该多个第二拍摄位置及该多个第二特征影像,取得在第二姿态下,摄影装置与特征装置之间的一第二位置关系;及根据基座与特征装置之间的一第三位置关系、在第一姿态下基座与自由端之间的一第四位置关系、第一位置关系、在第二姿态下基座与自由端之间的一第五位置关系、及第二位置关系,计算自由端与摄影装置之间的一第六位置关系,以获得一定位校正信息。
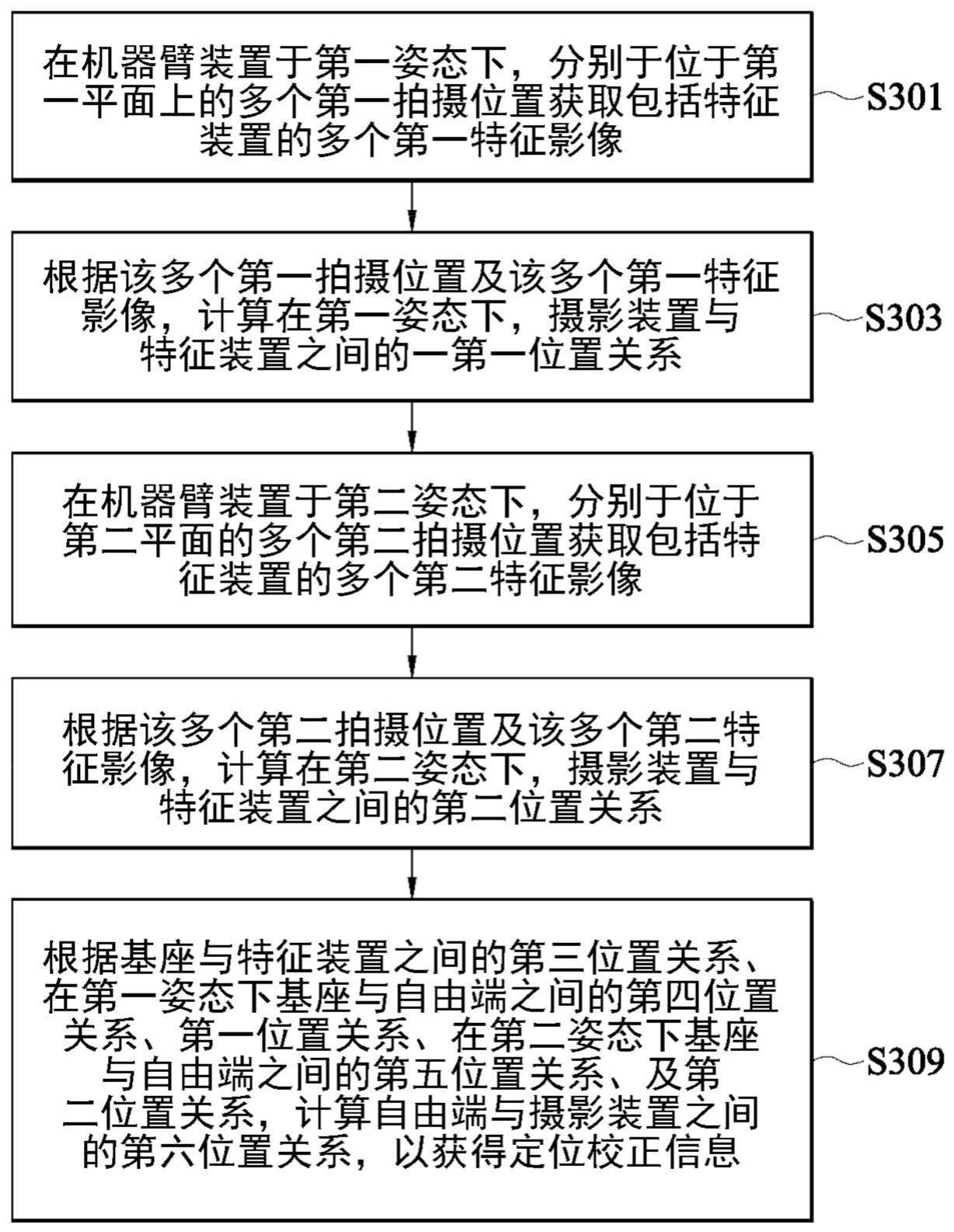
2、机器臂系统的定位校正方法包含在一机器臂装置于一第一姿态,设置于机器臂装置的一自由端的一摄影装置,分别于位于一第一平面上的多个第一拍摄位置获取包括一特征装置的多个第一特征影像;根据该多个第一拍摄位置及该多个第一特征影像,取得于第一姿态,摄影装置与特征装置之间的一第一位置关系;在机器臂装置于一第二姿态,摄影装置分别于位于一第二平面上的多个第二拍摄位置获取包括特征装置的多个第二特征影像,其中,机器臂装置移动自由端来带动摄影装置至该多个第一拍摄位置及该多个第二拍摄位置;根据该多个第二拍摄位置及该多个第二特征影像,取得于第二姿态下,摄影装置与特征装置之间的一第二位置关系;及根据机器臂装置的一基座与特征装置之间的一第三位置关系、在第一姿态下基座与自由端之间的一第四位置关系、第一位置关系、在第二姿态下基座与自由端之间的一第五位置关系、及第二位置关系,计算自由端与摄影装置之间的一第六位置关系,以获得一定位校正信息。
3、综上所述,依据一些实施例,由于特征装置可以是简单的机构元件及可以无需具备特定规格的模板图形,因此可以节省制造成本,且第六位置关系及定位校正信息的精准度也较不易受到影响。在一些实施例中,可以通过调整机器臂装置在该多个第一拍摄位置之间的移动量及在该多个第二拍摄位置之间的移动量,而在无需改变特征装置的尺寸的情形下,维持第六位置关系及定位校正信息的精准度。在一些实施例中,由于特征装置在该多个第一特征影像及该多个第二特征影像中可以是形成点图案,因此若机器臂装置在第一姿态与第二姿态之间的位移幅度较大时,特征装置仍可以被摄影装置获取。
技术特征:
1.一种机器臂系统的定位校正方法,包含:
2.如权利要求1所述的机器臂系统的定位校正方法,其中,各该第一特征影像具有由该特征装置成像形成的一第一特征点,且计算该第一位置关系是:
3.如权利要求1所述的机器臂系统的定位校正方法,其中,各该第二特征影像具有由该特征装置成像形成的一第二特征点,且计算该第二位置关系是:
4.如权利要求2或3中任一项所述的机器臂系统的定位校正方法,其中各该移动量与该摄影装置的一取像范围成正相关。
5.如权利要求1所述的机器臂系统的定位校正方法,其中该特征装置为一尖点装置。
6.一种机器臂系统,包含:
7.如权利要求6所述的机器臂系统,其中,各该第一特征影像具有由该特征装置成像形成的一第一特征点,该控制装置用以:
8.如权利要求6所述的机器臂系统,其中,各该第二特征影像具有由该特征装置成像形成的一第二特征点,该控制装置用以:
9.如权利要求7或8中任一项所述的机器臂系统,其中各该移动量与该摄影装置的一取像范围成正相关。
10.如权利要求6所述的机器臂系统,其中该特征装置为一尖点装置。
技术总结
机器臂系统的定位校正方法包含在包含有基座及自由端的机器臂装置分别于二姿态,通过摄影装置分别于二平面上的拍摄位置获取包括特征装置的多个第一特征影像及多个第二特征影像;根据拍摄位置及特征影像,分别取得摄影装置与特征装置之间在二姿态的第一位置关系及第二位置关系,其中摄影装置是被移动的自由端而被带动至拍摄位置;及根据基座与特征装置之间的第三位置关系、基座与自由端之间分别在二姿态下的第四位置关系及第五位置关系、第一位置关系及第二位置关系,计算自由端与摄影装置之间的第六位置关系,以获得定位校正信息。
技术研发人员:黄科融,李朝钤,王仁晖,吴俊锡
受保护的技术使用者:和硕联合科技股份有限公司
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!