具有变刚度的半包裹式软体抓手装置及其调节方法
本发明涉及软体抓手,特别涉及一种具有变刚度的半包裹式软体抓手装置及其调节方法。
背景技术:
1、目前机器人抓手大多是刚性的,但刚性手的环境适应性差,缺少柔顺性,不适宜抓取易碎、柔软和异形的物体。近年来,由于软体机器人具有良好的环境适应性、顺应性和灵活性,诸多材料可以用于软体手的末端执行器中,因此可以根据其形状的变化对多种形状的物体进行包覆抓取。为了提高软体手抓取时的稳定性、负载能力,基于阻塞变刚度方法的末端执行器使变刚度软体抓手在抓取时展现出了强稳定性和高负载能力,但在抓取效率和场景适应方面欠缺。
2、中国专利cn111360856a公开了一种包裹式软抓手,工作时气动手指和袋状包裹装置保持张开状态,自上而下靠近物体,待包裹装置完全包裹物体时,通过驱动手指抓取单元带动处于其内部的包裹装置实现闭合,最终物体实现包裹式、封闭式抓取;中国专利cn113370241a公开了一种横纵耦合气动型多指软体机械手,工作时通过对驱动气动手指带动可伸缩部分横向收缩,待物体被包裹完毕后,完成一次抓取流程。上述两种抓取模式均属于自上而下的全包裹抓取,不论是袋状包裹装置还是底端的可伸缩装置,抓取时由于全包裹模式下软体手的构型导致其张开范围有限,抓取时需要完全将物体包裹后才能完成稳定提升,因此在抓取板状、瓶状、杆状或者管状等异形物体时有一定困难。
3、目前,全包裹软体抓手占软体手的主要部分,主要存在适应性不够、控制繁琐等问题。本发明提出的具有变刚度的半包裹式软体抓手装置能够解决在抓取异形物体适应性不足的问题,并且该机械手可以应用在水果采摘、物件快速传递等场景中。
技术实现思路
1、针对现有技术存在的问题,本发明提供一种具有变刚度的半包裹式软体抓手装置及其调节方法,通过第一传动部件和第二传动部件的啮合传动,从而带动与第二传动部件中第二留置孔连接的腱绳沿第二传动部件的周向无交叉匀速旋转,致使变刚度袋由内向外产生凹陷变形,与此同时变刚度袋在气泵的抽压下,使其内部处于负压状态,抓取组件以呈抓握状态的方式贴合在被抓物体表面,达到自适应、半包覆抓取的状态,整个装置具有结构简单、适应性强以及抓取范围大等优点。
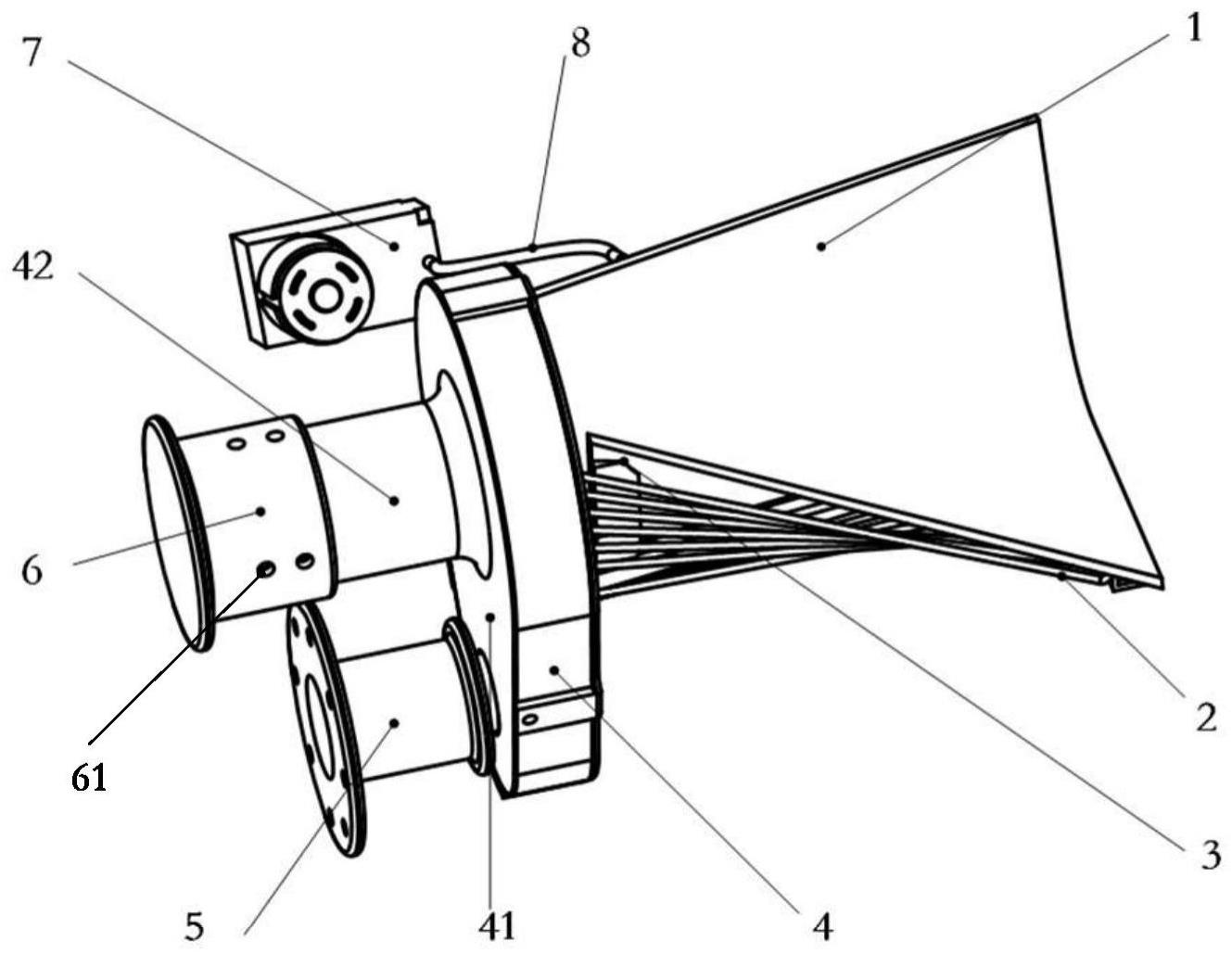
2、本发明提供了一种具有变刚度的半包裹式软体抓手装置,其包括变刚度袋、腱绳、合金架、连接座组件、第一固定座、第二固定座、气泵和气管。所述连接座组件,其包括连接座后端盖、连接座凸起、连接座前端盖、第一传动部件、第二传动部件、内置螺纹孔、齿轮键槽、第二留置孔和销孔,所述连接座后端盖的第一端设有连接座凸起,所述连接座凸起上设有内置螺纹孔,所述连接座后端盖的安装端和所述连接座前端盖的安装端连接,所述第一传动部件和所述第二传动部件的安装端分别与所述连接座前端盖的第一端和第二端连接,所述第二传动部件的圆周上对称设有齿轮键槽,所述齿轮键槽的内部设有第二留置孔,所述第二传动部件的安装端的一侧设有销孔。所述变刚度袋的内部均匀设有变刚度层填充物,所述气泵的输出端和所述气管的第一端连接,所述气管的第二端和所述变刚度袋的输入端连接,所述变刚度袋的第一留置孔和所述合金架的第一留置孔重合,所述合金架的片状销和所述第二传动部件的销孔固定连接,所述腱绳的第一安装端和所述第一留置孔固定连接,所述腱绳的第二安装端和所述第二留置孔固定连接,所述腱绳以顺时针无交叉形式周向均匀分布系在所述第二传动部件和所述变刚度袋上。所述第一固定座的第一安装端设有法兰盘,所述第一固定座的第二安装端和所述第一传动部件的输入端固定连接,所述第一传动部件和所述第二传动部件啮合连接,所述第二固定座的连接座螺纹孔和所述连接座凸起的内置螺纹孔固定连接。
3、可优选的是,所述第一传动部件和所述第二传动部件组成传动组件,所述传动组件、所述第一固定座、所述第二固定座和所述连接座组件组成驱动组件,所述合金架、所述腱绳和所述变刚度袋组成抓取组件。
4、可优选的是,所述合金架,其包括短圆弧条、长圆弧条、连接条和片状销,所述短圆弧条的外形呈半优弧,所述半优弧的最大半径小于与其连接的连接座前端盖的最大外切圆半径,所述短圆弧条的一端设有片状销;所述长圆弧条的外形呈半劣弧,所述长圆弧条的上表面沿边缘均匀分布第一留置孔。
5、可优选的是,所述长圆弧条的圆孔的数量、所述第一留置孔的数量、所述第二留置孔的数量和所述腱绳的数量相等。
6、可优选的是,所述变刚度袋的表面由两侧向内部凹陷,所述变刚度层填充物采用摩擦片、颗粒状固体、纤维、泡沫和碎屑中一种或多种变刚度层填充物,通过改变变刚度袋内部气压大小来实现刚度的调节。
7、可优选的是,所述第一固定座的安装轴线和所述第二固定座的安装轴线平行,所述第一固定座的安装轴线和所述第一传动部件的轴线在同一条直线上,所述第二固定座的安装轴线和所述第二传动部件的轴线在同一条直线上。
8、本发明的另外一方面,提供一种利用前述具有变刚度的半包裹式软体抓手装置的调节方法,其包括以下步骤:
9、s1、在抓取的初始状态下,所述抓取组件处于松弛状态,启动通过第一固定座连接电机的第一传动部件,在第一传动部件的带动下第二传动部件啮合转动。
10、s2、与第二传动部件上第二留置孔连接的腱绳沿周向无交叉匀速旋转,由于腱绳的拉伸带动所述合金架变形,从而驱使所述变刚度袋向内凹陷。
11、s3、启动气泵通过气管对变刚度袋内部进行行抽气,使变刚度袋整体发生收缩变形,从而变刚度袋贴合在被抓物体表面实现半包抓取。
12、s4、在抓取结束后,关闭气泵,同时使通过第一固定座连接电机的第一传动部件进行与s1中相反的转动方向转动,与第二传动部件上第二留置孔连接的腱绳沿周向无交叉匀速向与s1相反的方向旋转,使合金架恢复变形前的状态,从而使变刚度袋整体恢复到初始状态。
13、本发明与现有技术相比,具有如下优点:
14、1.本发明利用电机、负压组件、腱绳和变刚度层实现了软体抓手的构型,电机驱动传动机构进而带动腱绳旋转运动与变刚度袋形成人手掌状,并通过负压组件来定型手掌部分,既能够抓取诸多异形物体,也可以以“侧握”的方式快速拾起长杆状、板状和瓶装等目标物体,并且在变刚度的影响下能够实现刚柔可控的性能,使得抓取时包裹性和适应性的提高。
15、2.本发明与全包裹、封闭式软抓手相比,采用侧握或者抓握的方式实现对物体的无伤抓取,能够实现对板状、杆状和瓶状等异形物体的平稳抓取,并且可以做到抓取后的托、握或者举等传递动作,在水果采摘、物件快速传递等场合有很大应用前景。
技术特征:
1.一种具有变刚度的半包裹式软体抓手装置,其包括变刚度袋、腱绳、合金架、连接座组件、第一固定座、第二固定座和气泵,其特征在于,
2.根据权利要求1所述的具有变刚度的半包裹式软体抓手装置,其特征在于,所述第一传动部件和所述第二传动部件组成传动组件,所述传动组件、所述第一固定座、所述第二固定座和所述连接座组件组成驱动组件,所述合金架、所述腱绳和所述变刚度袋组成抓取组件。
3.根据权利要求1所述的具有变刚度的半包裹式软体抓手装置,其特征在于,所述合金架,其包括短圆弧条、长圆弧条、连接条和片状销,所述短圆弧条的外形呈半优弧,所述半优弧的最大半径小于与其连接的连接座前端盖的最大外切圆半径,所述短圆弧条的一端设有片状销;所述长圆弧条的外形呈半劣弧,所述长圆弧条的上表面沿边缘均匀分布第一留置孔。
4.根据权利要求1或者3所述的具有变刚度的半包裹式软体抓手装置,其特征在于,所述长圆弧条的圆孔的数量、所述第一留置孔的数量、所述第二留置孔的数量和所述腱绳的数量相等。
5.根据权利要求1所述的具有变刚度的半包裹式软体抓手装置,其特征在于,所述变刚度袋的表面由两侧向内部凹陷,所述变刚度层填充物采用摩擦片、颗粒状固体、纤维、泡沫和碎屑中一种或多种变刚度层填充物,通过改变变刚度袋内部气压大小来实现刚度的调节。
6.根据权利要求1所述的具有变刚度的半包裹式软体抓手装置,其特征在于,所述第一固定座的安装轴线和所述第二固定座的安装轴线平行,所述第一固定座的安装轴线和所述第一传动部件的轴线在同一条直线上,所述第二固定座的安装轴线和所述第二传动部件的轴线在同一条直线上。
7.一种根据权利要求1-6之一所述的具有变刚度的半包裹式软体抓手装置的调节方法,其特征在于,其包括以下步骤:
技术总结
本发明提供一种具有变刚度的半包裹式软体抓手装置及其调节方法,其包括变刚度袋、腱绳、合金架、连接座组件、固定座和气泵。气泵的输出端通过气管和变刚度袋的输入端连接,变刚度袋的安装端通过合金架和连接座前端盖的第三端固连,腱绳的第一安装端和变刚度袋的第一留置孔固连,腱绳的第二安装端和第二留置孔固连。第一固定座的第二安装端和第一传动部件的输入端固连,第一传动部件和第二传动部件啮合,第二固定座的连接座螺纹孔和连接座凸起的内置螺纹孔固连。本发明通过驱动传动部件带动腱绳均匀无交叉沿周向旋转,致使变刚度袋产生凹陷变形,与此同时变刚度袋内部处于负压状态,抓取组件贴合在被抓物体表面,达到自适应和半包覆抓取。
技术研发人员:赵延治,董历铭,单煜,裴昌磊
受保护的技术使用者:燕山大学
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!