机器人交互方法、装置、机器人和存储介质与流程
本申请涉及机器人,特别是涉及一种机器人交互方法、装置、机器人和存储介质。
背景技术:
1、机器人是一种能够通过编程和自动控制来执行各种任务的机器。机器人具有感知、决策、执行等基本特征,可以辅助甚至替代人类完成危险、繁重、复杂的工作,提高工作效率与质量。机器人可以通过运行预先编排的程序的方式进行工作,也可以通过接受人类指挥的方式进行工作。目前,机器人在接受人类指挥时,机器人通过自身的视觉系统识别人类作出的手势信号,从而执行识别到的手势信号对应的指令,以完成指令对应的工作。
2、然而,机器人通过视觉系统识别人类手势信号的方式,当机器人视觉系统识别的场景较为复杂的情况下,图像分析和处理的精度受到影响,对手势信号识别的准确度低,导致对机器人的控制准确度低。
技术实现思路
1、基于此,有必要针对上述技术问题,提供一种能够提高机器人控制准确度的机器人方法、装置、机器人和计算机可读存储介质。
2、第一方面,本申请提供了一种机器人交互方法。所述方法包括:
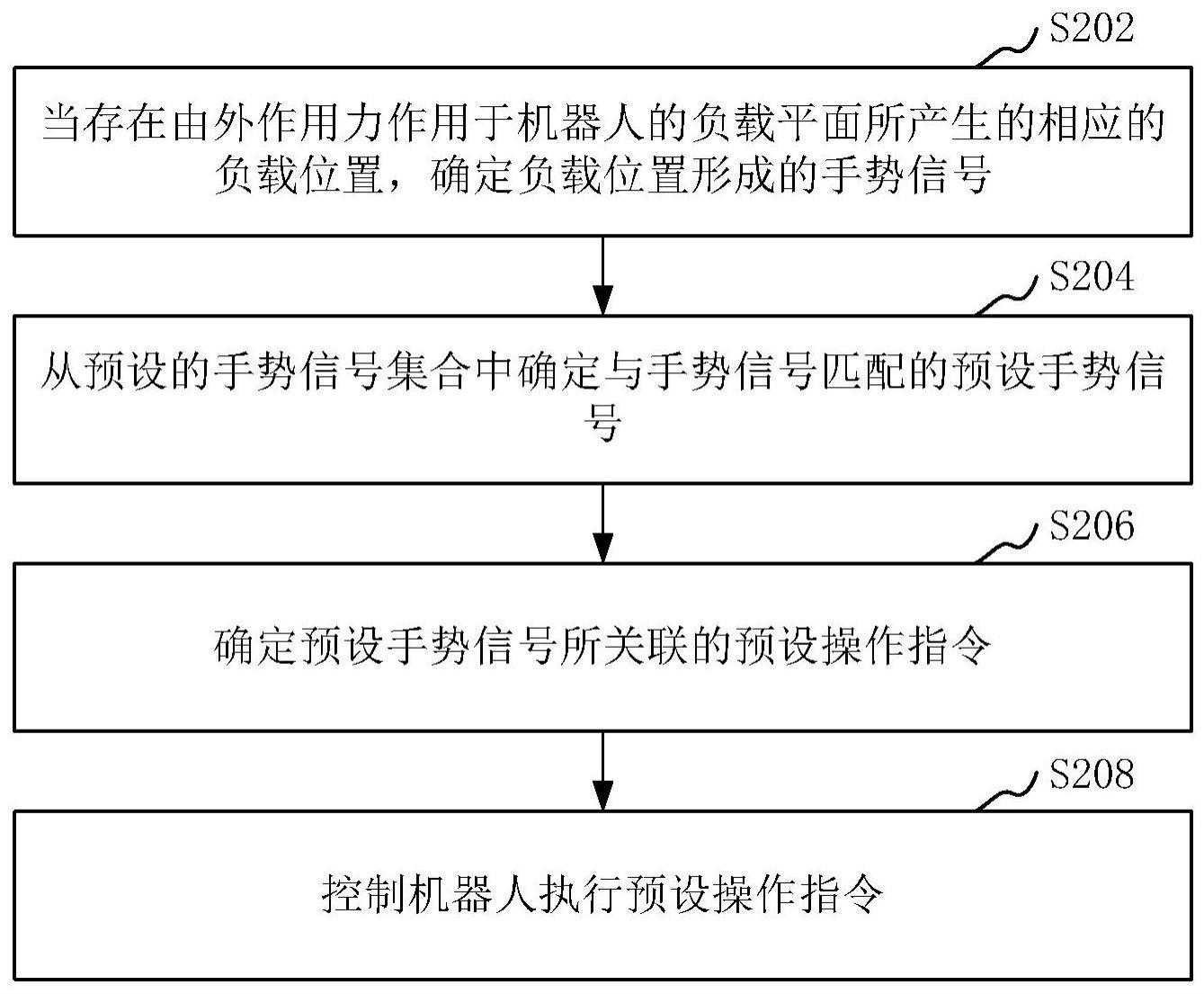
3、当存在由外作用力作用于机器人的负载平面所产生的相应的负载位置时,确定所述负载位置形成的手势信号;
4、从预设的手势信号集合中确定与所述手势信号匹配的预设手势信号;
5、确定所述预设手势信号所关联的预设操作指令;
6、控制所述机器人执行所述预设操作指令。
7、第二方面,本申请还提供了一种机器人交互装置。所述装置包括:
8、手势信号确定模块,用于当存在由外作用力作用于机器人的负载平面所产生的相应的负载位置时,确定所述负载位置形成的手势信号;从预设的手势信号集合中确定与所述手势信号匹配的预设手势信号;
9、操作指令确定模块,用于确定所述预设手势信号所关联的预设操作指令;
10、控制模块,用于控制所述机器人执行所述预设操作指令。
11、第三方面,本申请还提供了一种机器人。所述机器人包括存储器和处理器,所述存储器存储有计算机程序,所述处理器执行所述计算机程序时实现以下步骤:
12、当存在由外作用力作用于机器人的负载平面所产生的相应的负载位置时,确定所述负载位置形成的手势信号;
13、从预设的手势信号集合中确定与所述手势信号匹配的预设手势信号;
14、确定所述预设手势信号所关联的预设操作指令;
15、控制所述机器人执行所述预设操作指令。
16、第四方面,本申请还提供了一种计算机可读存储介质。所述计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时实现以下步骤:
17、当存在由外作用力作用于机器人的负载平面所产生的相应的负载位置时,确定所述负载位置形成的手势信号;
18、从预设的手势信号集合中确定与所述手势信号匹配的预设手势信号;
19、确定所述预设手势信号所关联的预设操作指令;
20、控制所述机器人执行所述预设操作指令。
21、上述机器人交互方法、装置、机器人和存储介质,通过识别机器人的负载平面的负载位置,确定负载位置形成的手势信号,可识别出用于指示机器人进行操作的手势信号;进而从预设的手势信号集合中确定与手势信号匹配的预设手势信号,使得机器人执行预设手势信号所关联的预设操作指令,完成对机器人的操作控制;由于负载位置是由外作用力作用于机器人的负载平面所产生的,通过直接接触机器人产生手势信号,相对于通过视觉系统识别的方式,机器人受到的干扰较少,可提高手势识别的准确性,从而获取准确的操作指令,进而提高对机器人控制的准确度。
技术特征:
1.一种机器人交互方法,其特征在于,所述方法包括:
2.根据权利要求1所述的方法,其特征在于,所述方法还包括:
3.根据权利要求2所述的方法,其特征在于,所述关节电机包括髋关节电机和膝关节电机;所述髋关节电机用于驱动所述机身活动;所述膝关节电机用于驱动所述行走机构的支撑部相对于所述髋关节电机活动,以使所述行走机构将所述机身支撑于地面;所述基于获取的所述电流值,确定由所述外作用力作用于所述机器人的所述负载平面所产生的相应的负载位置,包括:
4.根据权利要求3所述的方法,其特征在于,所述负载平面是包括第一边长与第二边长的矩形;所述第一边长是所述机身连接所述行走机构的一侧对应的所述负载平面的第一边的边长,所述第二边长是所述负载平面相异于所述第一边的第二边的边长;所述负载位置通过所述第一边和所述第二边构成的坐标系表示,所述负载位置包括与所述第一边相对应的第一维度坐标以及与所述第二边相对应的第二维度坐标;
5.根据权利要求2所述的方法,其特征在于,所述行走机构包括设置在所述机身相对侧的第一行走腿和第二行走腿;
6.根据权利要求1至5任一项所述的方法,其特征在于,所述外作用力是多个外作用力,所述手势信号是手势轨迹,所述确定所述负载位置形成的手势信号包括:
7.根据权利要求6所述的方法,其特征在于,所述预设手势信号是预设手势轨迹,所述从预设的手势信号集合中确定与所述手势信号匹配的预设手势信号包括:
8.一种机器人交互装置,其特征在于,所述装置包括:
9.一种机器人,包括存储器和处理器,所述存储器存储有计算机程序,其特征在于,所述处理器执行所述计算机程序时实现权利要求1至7中任一项所述的方法的步骤。
10.一种计算机可读存储介质,其上存储有计算机程序,其特征在于,所述计算机程序被机器人执行时实现权利要求1至7中任一项所述的方法的步骤。
技术总结
本申请涉及一种机器人交互方法、装置、机器人和存储介质。所述方法包括:当存在由外作用力作用于机器人的负载平面所产生的相应的负载位置时,确定负载位置形成的手势信号;从预设的手势信号集合中确定与手势信号匹配的预设手势信号;确定预设手势信号所关联的预设操作指令;控制机器人执行预设操作指令。采用本方法能够提高对机器人控制的准确度。
技术研发人员:张笛,郁亚南,廖铉泓
受保护的技术使用者:东莞市本末科技有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!