一种送餐机器人配餐系统的制作方法
本发明属于机器人自动配餐,具体涉及一种送餐机器人配餐系统。
背景技术:
1、目前,很多酒店或医院住院场合的配餐一般采用自动或人工派送的送餐车,现有人手的手推送餐车的餐盒放置区一般为具有顶部出料口的餐盒存放仓结构,需要人工将送餐车推送至配餐位置后派发餐盒,消耗人力配送成本,自动化水平低。而现有自动化的送餐车,餐盒放置区一般为一个顶部开口的大空间餐盒存放仓结构并且存放的餐盒为单一的菜品,由于酒店或医院住院场合等不具备用户自助选餐服务系统,因此不可根据用户需求个性化选择,不能较好地满足用户选餐需求,用户用餐体验效果不理想。
技术实现思路
1、本发明的目的在于克服现有的酒店或医院住院场合等使用的自动送餐车配餐服务存在供应的餐盒菜品单一,缺乏根据需求自助选择不同套餐存在的问题,提供一种用户可根据口味需求自助选择不同套餐餐盒的送餐机器人配餐系统。
2、为了达到上述目的,本发明采用以下技术方案:
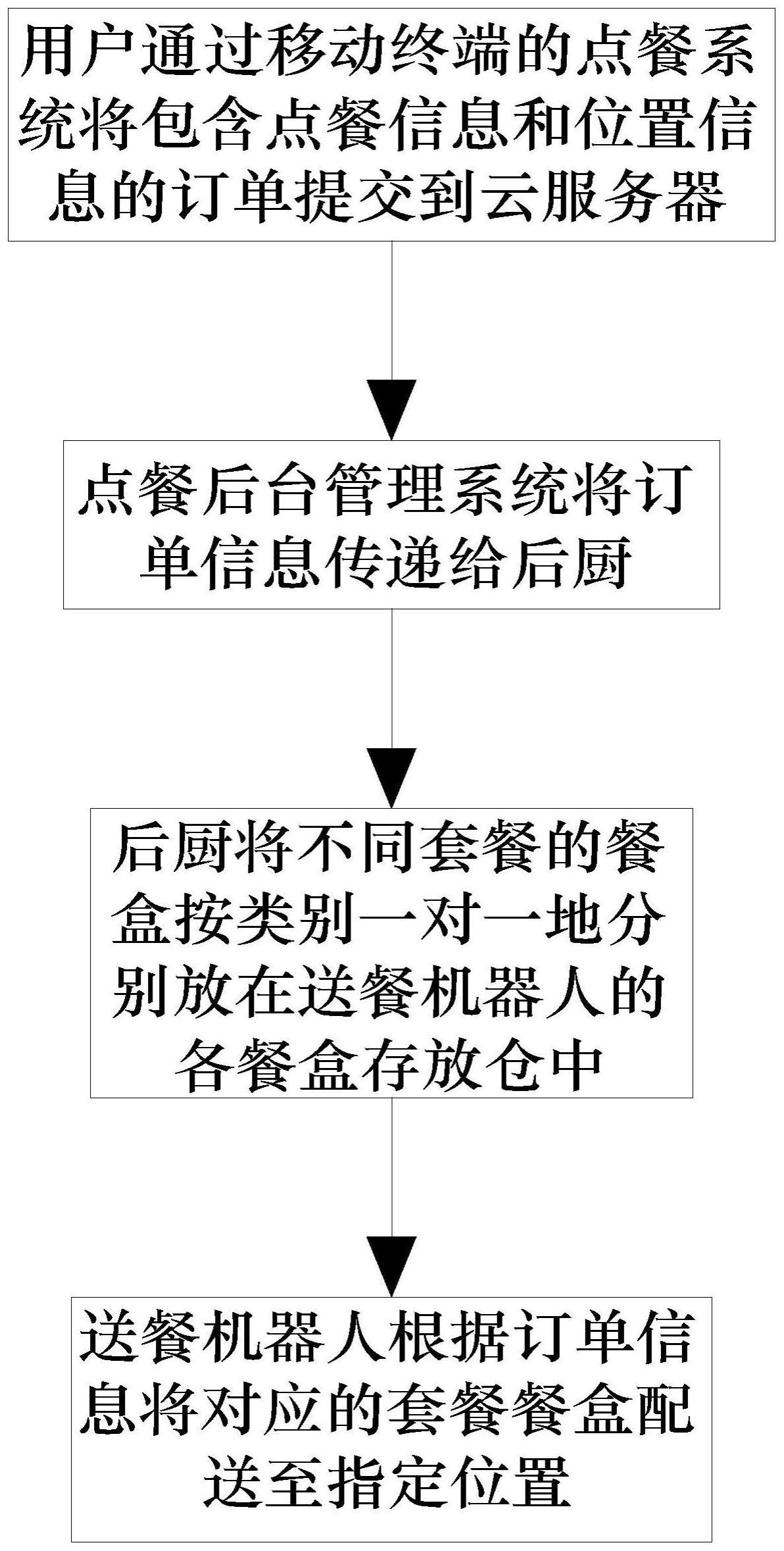
3、一种送餐机器人配餐系统,包括送餐机器人、机器人调度系统、云服务器、点餐后台管理系统和移动终端;用户通过移动终端的点餐系统将包含点餐信息和位置信息的订单提交到云服务器,点餐后台管理系统将订单信息传递给后厨,后厨将不同套餐的餐盒按类别一对一地分别放在送餐机器人的各餐盒存放仓中;所述送餐机器人,用于根据订单信息将对应的套餐餐盒配送至指定位置,其包括agv车体、餐盒存放部、餐盒派发机构和控制组件;餐盒存放部设有多个餐盒存放仓和为每个餐盒存放仓配置的托料机构,餐盒存放仓顶部设有出料口,餐盒派发机构用于将位于出料口的餐盒向外侧派发,托料机构用于将叠放在顶部的餐盒向出料口一侧传递。
4、与现有技术相比,本发明的送餐机器人配餐系统,用户通过移动终端的点餐系统将点餐信息和位置信息提交到云服务器,点餐后台管理系统将生成的订单信息收集后传递给后厨,后厨根据收集订单制作成多个类别套餐的餐盒并分别一对一地放置在送餐机器人的多个餐盒存放仓中,便于送餐机器人根据各用户的订单将所需的餐盒配送至用户用餐位置,满足用户不同口味需求的个性化选餐,用户体验好。而且不同类别的餐盒按照分类放置在不同的餐盒存放仓中,方便送餐机器人在各餐盒存放仓快速选取并自动派发至用户的用餐位置,无需用户在餐盒存放仓中操作取餐,使用方便。
5、进一步的,所述送餐机器人配置有触屏点餐面板,点餐系统包括用户移动终端的微信小程序和/或触屏点餐面板;通过这样设置,便于用户使用移动终端远程点餐,或就近送餐机器人位置点餐,使用方便。
6、进一步的,所述送餐机器人记录有餐厅地图信息,所述位置信息为餐厅内的餐桌号;或者,所述送餐机器人记录有酒店各楼层的地图信息,所述位置信息为酒店内的房间号;通过这样设置,送餐机器人采用自动导航的方式为各用户用餐位置配送餐盒,较好地节省了人力配送成本。
7、进一步的,所述送餐机器人通过自主导航的方式进行配餐;通过这样设置,送餐机器人采用自主导航的方式送餐,配餐效果好。
8、进一步的,所述送餐机器人通过bms电池管理系统来获取电池本身的电量、电压;机器人调度系统在送餐机器人低电量低于20%,将会强制其停止任务,并安排送餐机器人前往充电桩站点执行充电任务;通过这样设置,较好地避免送餐机器人在送餐过程中出现抛锚无法继续执行送餐任务的情况,保证送餐机器人的使用可靠性。
9、进一步的,所述托料机构包括托盘和驱动托盘在餐盒存放仓内竖向移动的竖向驱动机构,托盘用于承托叠放的餐盒;所述控制组件包括控制模块和第一检测器,第一检测器用于检测靠近出料口的餐盒,在出料口位置的餐盒被转移后,控制模块控制竖向驱动机构将托盘举升至第一检测器能检测有餐盒的预设位置。通过这样设置,使得托盘上最顶层的餐盒被取走后,餐盒存放仓内的托料机构可将最顶层的餐盒自动推送至出料口位置,方便餐盒派发机构持续性地在出料口位置快速派发餐盒,餐盒派发操作方便,使用效果好。而且通过设置托盘运送餐盒,使餐盒在移动过程中稳定,不易发生倾倒泼洒等情况,送餐可靠性好。
10、进一步的,所述托盘配置有用于检测第二检测器,所述第二检测器用于检测在托盘为空载状态时使竖向驱动机构驱动托盘下降至最低位置状态;所述餐盒存放仓内设有用于限位托盘下降至预设最低位置的行程检测装置;通过这样设置,托盘为空载状态时下降至最低位置,便于后厨在配餐区补充餐盒,方便操作。
11、进一步的,所述餐盒派发机构,包括用于夹取和释放餐盒的夹料机构、餐盒派发驱动机构和视觉识别器,餐盒派发驱动机构用于驱动夹料机构在餐盒存放仓取料和在餐盒放置区放料之间移动,视觉识别器用于为夹料机构提供识别餐盒存放仓内餐盒的条件;通过这样设置,采用视觉识别的方式识别餐盒和定位放置派送,识别派发方式可靠。
12、进一步的,所述餐盒派发驱动机为六轴机械臂;通过这样设置,餐盒派发驱动机动作自由灵活,活动范围大,派发餐盒效果好。
13、进一步的,所述夹料机构包括支架、以及设于支架上的夹紧驱动电机、同步联动组件和两个夹取件;两个夹取件分别通过导向组件可滑动连接在支架上,所述同步联动组件包括与夹紧驱动电机连接的驱动轮和分别连接在夹取件上的传动齿条,两传动齿条分别与驱动轮啮合,并且可随所述驱动轮运转时联动两夹取件相对靠拢或分开,实现夹料机构的夹紧或松开;通过这样设置,夹料机构的两夹取件可同步相对靠拢或分开,餐盒取料和释放效果好。
14、进一步的,所述餐盒存放部对应每个托料机构均配置有一个可打开或关闭餐盒存放仓的仓门;通过这样设置,后厨在配餐区通过打开仓门对餐盒存放仓内补充餐盒。
技术特征:
1.一种送餐机器人配餐系统,其特征在于,包括送餐机器人、机器人调度系统、云服务器、点餐后台管理系统和移动终端;
2.根据权利要求1所述的送餐机器人配餐系统,其特征在于,所述送餐机器人配置有触屏点餐面板,点餐系统包括用户移动终端的微信小程序和/或触屏点餐面板。
3.根据权利要求1所述的送餐机器人配餐系统,其特征在于,所述送餐机器人记录有餐厅地图信息,所述位置信息为餐厅内的餐桌号;
4.根据权利要求1至3任一项所述的送餐机器人配餐系统,其特征在于,所述送餐机器人通过自主导航的方式进行配餐。
5.根据权利要求1所述的送餐机器人配餐系统,其特征在于,所述送餐机器人通过bms电池管理系统来获取电池本身的电量、电压;机器人调度系统在送餐机器人低电量低于20%,将会强制其停止任务,并安排送餐机器人前往充电桩站点执行充电任务。
6.根据权利要求1至3或5任一项所述的送餐机器人配餐系统,其特征在于,所述托料机构包括托盘和驱动托盘在餐盒存放仓内竖向移动的竖向驱动机构,托盘用于承托叠放的餐盒;
7.根据权利要求6所述的送餐机器人配餐系统,其特征在于,所述托盘配置有用于检测第二检测器,所述第二检测器用于检测在托盘为空载状态时使竖向驱动机构驱动托盘下降至最低位置状态;所述餐盒存放仓内设有用于限位托盘下降至预设最低位置的行程检测装置。
8.根据权利要求1至3或5任一项所述的送餐机器人配餐系统,其特征在于,所述餐盒派发机构,包括用于夹取和释放餐盒的夹料机构、餐盒派发驱动机构和视觉识别器,餐盒派发驱动机构用于驱动夹料机构在餐盒存放仓取料和在餐盒放置区放料之间移动,视觉识别器用于为夹料机构提供识别餐盒存放仓内餐盒的条件。
9.根据权利要求8所述的送餐机器人配餐系统,其特征在于,所述餐盒派发驱动机为六轴机械臂;
10.根据权利要求1所述的送餐机器人配餐系统,其特征在于,所述餐盒存放部对应每个托料机构均配置有一个可打开或关闭餐盒存放仓的仓门。
技术总结
本发明的送餐机器人配餐系统,用户通过移动终端的点餐系统将点餐信息和位置信息提交到云服务器,点餐后台管理系统将生成的订单信息收集后传递给后厨,后厨根据收集订单制作成多个类别套餐的餐盒并分别一对一地放置在送餐机器人的多个餐盒存放仓中,便于送餐机器人根据各用户的订单将所需的餐盒配送至用户用餐位置,满足用户不同口味需求的个性化选餐,用户体验好。而且不同类别的餐盒按照分类放置在不同的餐盒存放仓中,方便送餐机器人在各餐盒存放仓快速选取并自动派发至用户的用餐位置,无需用户在餐盒存放仓中操作取餐,使用方便。
技术研发人员:陈友,陈飞龙,陈小铭,郭明浩,胡嘉裕
受保护的技术使用者:佛山精洁机器人有限公司
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!