一种用于桥梁检测的机械臂组件及其工作方法与流程
本发明涉及桥梁检测,具体公开了一种用于桥梁检测的机械臂组件及其工作方法。
背景技术:
1、在我国现在的桥梁检测中,对于危桥的检测大多采用无人机或者人工的方式进行检测,对于在役桥梁的检测多采用检测车的方式进行检测,但是检测车只能对桥面进行检测,对于桥底以及桥的底面检测仍然是一个桥梁检测的难点;
2、在使用搭载车检测时,对于桥底面通过采用桁架式机械臂的方式进行检测,但是正在使用的桥梁中存在路灯、栏杆等物体,导致桁架式机械臂检测的方式非常耗时,检测效率非常低。
技术实现思路
1、有鉴于此,本发明的目的在于提供一种用于桥梁检测的机械臂组件及其工作方法,能够解决跨越路灯等障碍物的同时,解决机械臂收回后存在一定区域检测不到的情况,检测效率大大提高。
2、为达到上述目的,本发明提供如下技术方案:
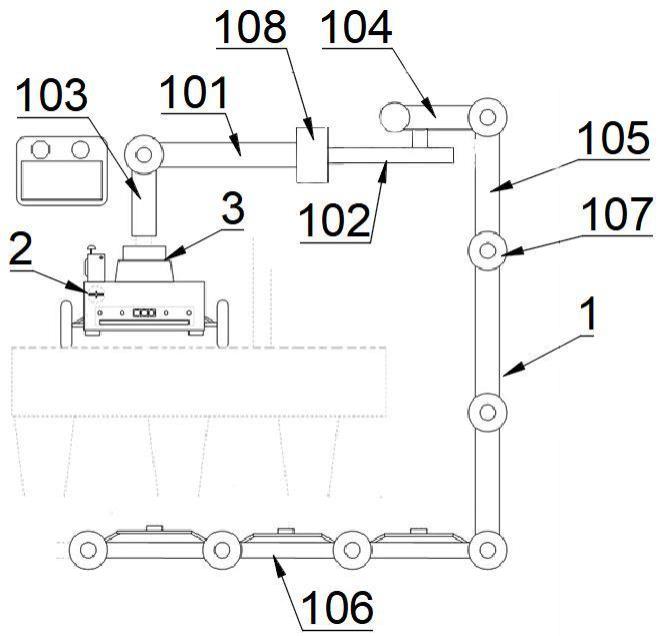
3、一种用于桥梁检测的机械臂组件,该机械臂组件包括越障臂和检测臂,其中:越障臂通过机械臂连接端口连接至搭载平台上,所述越障臂和机械臂连接端口均为两个,所述两个机械臂连接端口设于搭载平台上,两个越障臂分别通过不同的机械臂连接端口连接至搭载平台上;所述搭载平台上设有环形滑轨,所述机械臂连接端口与环形滑轨滑动连接;所述检测臂可切换地连接至两个越障臂的其中之一上。
4、优选地,所述两个越障臂均包括连接臂一、连接臂二和扣合组件,所述连接臂二两端与连接臂一的一端和连接端口连接,所述扣合组件固定连接至连接臂一的另一端。
5、优选地,所述检测臂包括横向切换臂、垂直臂、折叠臂和多个电驱动关节,其中,横向切换臂通过电驱动关节与垂直壁连接,垂直臂通过电驱动关节与折叠臂连接。
6、优选地,所述横向切换臂与垂直臂之间设有连接臂三,所述连接臂三两端分别与横向切换臂和垂直臂连接。
7、优选地,所述电驱动关节由电机与减速器组成。
8、优选地,所述扣合组件由升降结构、固定结构、动力结构和连接壳组成,所述升降结构、固定结构和动力结构均设于连接壳内。
9、优选地,所述动力结构包括电机、减速机和联轴器,电机、减速机和联轴器依次连接,电机固定至电机座上;所述动力结构包括齿轮和升降轴,升降轴穿过齿轮与联轴器相连接,所述齿轮与横向切换臂内壁上的内齿相啮合;所述升降结构为两个气缸,气缸的下侧固定至电机座上,通过气缸的气缸杆伸长,将升降轴向上推动。
10、优选地,所述垂直臂和折叠臂均设有三个,所述三个折叠臂的内测均设有检测安装座,所述检测安装座与折叠臂固定连接。
11、本发明还提供一种使用所述的机械臂组件进行桥梁检测的工作方法,其中:
12、步骤一:搭载平台在桥面移动进行桥梁检测,在遇到灯杆时,以横向切换臂的左侧为圆心,横向切换臂右侧转动,使得横向切换臂的右侧运动至两个越障臂中的第一越障臂的扣合组件内;
13、步骤二:此时两个越障臂中的第二越障臂的扣合组件内的气缸的气杆收缩,通过电机座使得升降轴和齿轮向上移动,进而使得升降轴穿过横向切换臂的连接端,齿轮与横向切换臂的连接端内壁的内齿啮合;
14、步骤三:所述第一越障臂中的扣合组件的气缸的气杆伸长,使得伸缩轴和齿轮脱离,进而实现横向切换臂转动,绕过灯杆。
15、本方案的工作原理及有益效果在于:
16、本发明通过两个机械臂连接端口和扣合组件,使得机械臂的前端在正常运行的情况下,机械臂后侧能够通过更换连接端口的方法解决机械臂收回后存在一定区域检测不到的情况,并通过搭载平台上的滑动装置使得两个连接端口在机械臂切换后能够保证改变位置不会形成错位的情况,并且保证搭载平台在移动的同时,机械臂自动切换连接端口实现灯杆的跨越,使得机械臂全自动,智能化程度增加。
技术特征:
1.一种用于桥梁检测的机械臂组件,该机械臂组件包括越障臂和检测臂,其中:
2.根据权利要求1所述的一种用于桥梁检测的机械臂组件,其特征在于:所述两个越障臂均包括连接臂一、连接臂二和扣合组件,所述连接臂二两端与连接臂一的一端和连接端口连接,所述扣合组件固定连接至连接臂一的另一端。
3.根据权利要求2所述的一种用于桥梁检测的机械臂组件,其特征在于:所述检测臂包括横向切换臂、垂直臂、折叠臂和多个电驱动关节,其中,横向切换臂通过电驱动关节与垂直壁连接,垂直臂通过电驱动关节与折叠臂连接。
4.根据权利要求3所述的一种用于桥梁检测的机械臂组件,其特征在于:所述横向切换臂与垂直臂之间设有连接臂三,所述连接臂三两端分别与横向切换臂和垂直臂连接。
5.根据权利要求3所述的一种用于桥梁检测的机械臂组件,其特征在于:所述电驱动关节由电机与减速器组成。
6.根据权利要求3所述的一种用于桥梁检测的机械臂组件,其特征在于:所述扣合组件由升降结构、固定结构、动力结构和连接壳组成。
7.根据权利要求6所述的一种用于桥梁检测的机械臂组件,其特征在于:所述动力结构包括电机、减速机和联轴器,电机、减速机和联轴器依次连接,电机固定至电机座上;所述动力结构还包括齿轮和升降轴,升降轴穿过齿轮与联轴器相连接,所述齿轮与横向切换臂内壁上的内齿相啮合;所述固定结构为电机座;所述升降结构为两个气缸,气缸的下侧固定至电机座上,通过气缸的气缸杆伸长,将升降轴向上推动。
8.根据权利要求3-7任一项所述的一种用于桥梁检测的机械臂组件,其特征在于:所述垂直臂和折叠臂均设有三个,所述三个折叠臂的内测均设有检测安装座,所述检测安装座与折叠臂固定连接。
9.一种使用权利要求1-7任一项所述的一种用于桥梁检测的机械臂组件进行桥梁检测的工作方法,其特征在于:
技术总结
本发明公开了一种用于桥梁检测的机械臂组件及其工作方法,该机械臂组件包括越障臂和检测臂,其中:越障臂通过机械臂连接端口连接至搭载平台上,越障臂和机械臂连接端口均为两个,两个机械臂连接端口设于搭载平台上,两个越障臂分别通过不同的机械臂连接端口连接至搭载平台上;搭载平台上设有环形滑轨,机械臂连接端口与环形滑轨滑动连接;检测臂可切换地连接至两个越障臂的其中之一上。本发明通过两个机械臂连接端口和扣合组件,能够通过更换连接端口的方法解决机械臂收回后存在一定区域检测不到的情况,并通过搭载平台上的滑动装置使得两个连接端口在机械臂切换后能够保证改变位置不会形成错位实现灯杆的跨越。
技术研发人员:晋杰,张劲泉,周炜,张禄,汪云峰,刘宏利,刘智超,李鹏飞,曹晋阳,侯琛,姜震宇,李臣,和海芳,姜山
受保护的技术使用者:交通运输部公路科学研究所
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!