一种工业机器人的制作方法
本发明涉及机器人,更具体的说是一种工业机器人。
背景技术:
1、工业机器人是广泛用于工业领域的机器,被广泛应用于电子、物流、化工、机械加工等各个工业领域之中,相比于传统的工业设备,工业机器人有众多的优势,比如机器人具有易用性、智能化水平高、生产效率及安全性高、易于管理且经济效益显著等特点,使得它们可以在高危环境下进行作业,特别是使用在机械加工领域的机器人,可代替人进行工作,进一步降低危险的发生,但是现有应用在机械加工上的机器人并不能对钢板进行精准的切割处理。
技术实现思路
1、本发明涉及机器人技术领域,更具体的说是一种工业机器人,其有益效果是可对钢板进行精准的切割处理。
2、本发明的目的通过以下技术方案来实现:
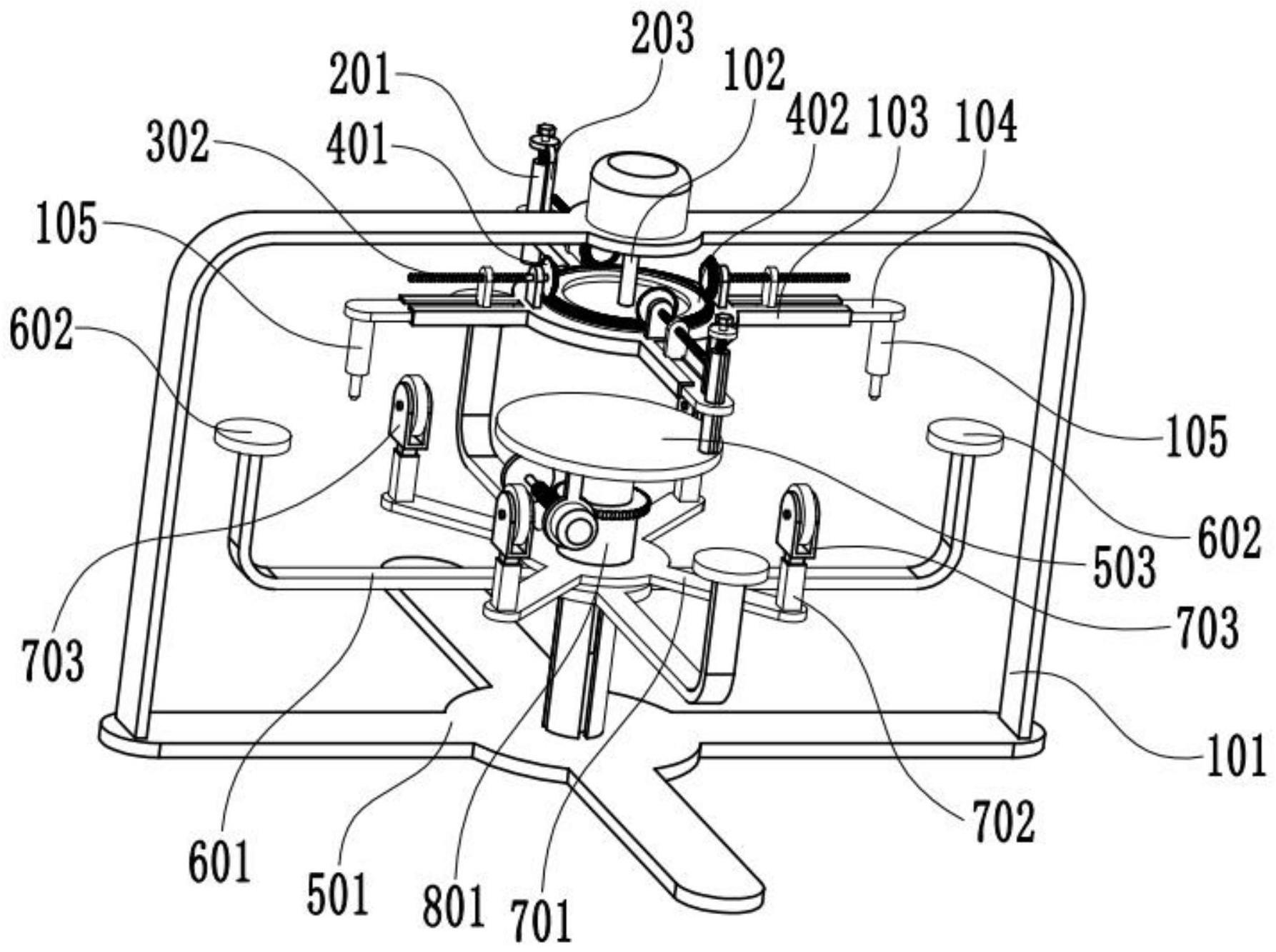
3、一种工业机器人,包括曲托框板和转动连接在曲托框板上的联动转轴,联动转轴上固定连接有带槽横板,带槽横板的左右两端均滑动连接有滑托凸板,两个滑托凸板上均固定连接有滑接空腔,两个滑接空腔内均滑动连接有发射器,两个滑接空腔内均固定连接有伸缩杆i,两个伸缩杆i分别与两个发射器固定连接。
4、进一步的,所述带槽横板的前后两端均滑动连接有滑托凸板,该两个滑托凸板上均滑动连接有打磨柱,两个打磨柱上均通过螺纹连接有升降丝杠,两个升降丝杠上均转动连接有轴承座i,两个轴承座i分别固定连接在位于前后两端的两个滑托凸板。
5、进一步的,所述带槽横板上固定连接有四个轴承座ii,四个轴承座ii上均转动连接有横移丝杠,四个横移丝杠分别与四个滑托凸板通过螺纹传动连接。
6、进一步的,四个所述横移丝杠的内端均固定连接有锥齿轮,带槽横板上转动连接有锥齿圈,锥齿圈与四个锥齿轮啮合传动连接。
7、进一步的,所述工业机器人还包括十字底板、带槽空腔和中心托板,十字底板固定连接在曲托框板上,带槽空腔固定连接在十字底板上,中心托板固定连接在带槽空腔上。
8、进一步的,所述工业机器人还包括升降托板、多个外围托板和伸缩杆ii,升降托板滑动连接在带槽空腔上,多个外围托板均匀固定连接在升降托板上,伸缩杆ii固定连接在升降托板上,伸缩杆ii固定连接在十字底板上。
9、进一步的,所述工业机器人还包括调位托板、多个升降座和多个滚轮组,调位托板转动连接在带槽空腔上,多个升降座均匀固定连接在调位托板上,多个滚轮组分别固定连接在多个升降座上。
10、进一步的,所述工业机器人还包括蜗轮空腔,蜗轮空腔固定连接在调位托板上,带槽空腔与蜗轮空腔转动连接。
11、进一步的,所述工业机器人还包括轴承座iii和蜗杆,轴承座iii固定连接在中心托板上,蜗杆转动连接在轴承座iii上,蜗轮空腔与蜗杆传动连接。
12、进一步的,所述工业机器人还包括限位圆板,限位圆板固定连接在带槽空腔上,调位托板与限位圆板接触。
技术特征:
1.一种工业机器人,其特征在于:包括曲托框板(101)和转动连接在曲托框板(101)上的联动转轴(102),联动转轴(102)上固定连接有带槽横板(103),带槽横板(103)的左右两端均滑动连接有滑托凸板(104),两个滑托凸板(104)上均固定连接有滑接空腔(105),两个滑接空腔(105)内均滑动连接有发射器(106),两个滑接空腔(105)内均固定连接有伸缩杆i(107),两个伸缩杆i(107)分别与两个发射器(106)固定连接。
2.根据权利要求1所述的一种工业机器人,其特征在于:所述带槽横板(103)的前后两端均滑动连接有滑托凸板(104),该两个滑托凸板(104)上均滑动连接有打磨柱(201),两个打磨柱(201)上均通过螺纹连接有升降丝杠(202),两个升降丝杠(202)上均转动连接有轴承座i(203),两个轴承座i(203)分别固定连接在位于前后两端的两个滑托凸板(104)。
3.根据权利要求2所述的一种工业机器人,其特征在于:所述带槽横板(103)上固定连接有四个轴承座ii(301),四个轴承座ii(301)上均转动连接有横移丝杠(302),四个横移丝杠(302)分别与四个滑托凸板(104)通过螺纹传动连接。
4.根据权利要求1所述的一种工业机器人,其特征在于:四个所述横移丝杠(302)的内端均固定连接有锥齿轮(401),带槽横板(103)上转动连接有锥齿圈(402),锥齿圈(402)与四个锥齿轮(401)啮合传动连接。
5.根据权利要求1所述的一种工业机器人,其特征在于:所述曲托框板(101)固定连接有十字底板(501)上,十字底板(501)上固定连接有带槽空腔(502),带槽空腔(502)上固定连接有中心托板(503)。
6.根据权利要求5所述的一种工业机器人,其特征在于:所述带槽空腔(502)上滑动连接有升降托板(601),升降托板(601)上固定连接有多个外围托板(602),升降托板(601)上固定连接有伸缩杆ii(603),伸缩杆ii(603)固定连接在十字底板(501)上。
7.根据权利要求5所述的一种工业机器人,其特征在于:所述带槽空腔(502)上转动连接有调位托板(701),调位托板(701)上固定连接有多个升降座(702),多个升降座(702)上均固定连接有滚轮组(703)。
8.根据权利要求7所述的一种工业机器人,其特征在于:所述调位托板(701)上固定连接有蜗轮空腔(801),蜗轮空腔(801)与带槽空腔(502)转动连接。
9.根据权利要求8所述的一种工业机器人,其特征在于:所述中心托板(503)上固定连接有轴承座iii(802),轴承座iii(802)上转动连接有蜗杆(803),蜗杆(803)与蜗轮空腔(801)传动连接。
10.根据权利要求7所述的一种工业机器人,其特征在于:所述带槽空腔(502)上固定连接有限位圆板(901),限位圆板(901)与调位托板(701)接触。
技术总结
本发明涉及机器人技术领域,更具体的说是一种工业机器人,包括曲托框板和转动连接在曲托框板上的联动转轴,联动转轴上固定连接有带槽横板,带槽横板的左右两端均滑动连接有滑托凸板,两个滑托凸板上均固定连接有滑接空腔,两个滑接空腔内均滑动连接有发射器,两个滑接空腔内均固定连接有伸缩杆I,两个伸缩杆I分别与两个发射器固定连接=,所述带槽横板的前后两端均滑动连接有滑托凸板,该两个滑托凸板上均滑动连接有打磨柱,两个打磨柱上均通过螺纹连接有升降丝杠,两个升降丝杠上均转动连接有轴承座I,两个轴承座I分别固定连接在位于前后两端的两个滑托凸板,其有益效果是可对钢板进行精准的切割处理。
技术研发人员:王鑫蕊
受保护的技术使用者:王鑫蕊
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!