一种升降机械夹取装置的制作方法
本申请涉及工业机器人,特别涉及一种升降机械夹取装置。
背景技术:
1、工业机器人,尤其是机械手的使用可以减省工人、提高效能、降低成本,起到提高产品品质、安全性好、提升工厂形象等效果,在现代生产过程中,机械手被广泛的运用于自动生产线中。机械手的研制和生产已成为高技术领域内,迅速发展起来的一门新兴的技术,它更加促进了机械手的发展,使得机械手能更好地实现与机械化和自动化的有机结合。机械手虽然目前还不如人手那样灵活,但它具有能不断重复工作和劳动,不知疲劳,不怕危险,抓举重物的力量比人手力大的特点,使用也越来越频繁。
2、现有专利cn218138056u公开了一种可旋转的升降机械手,可以快速的实现多角度位置的提升操作,大大的减少的升降机械手提升流程的操作,降低工作量。虽然该专利解决了现有升降机械手旋转搬运费时费力的问题,但是控制精度比较低,不适用于一些自动化程度高、精度要求比较严格的场景。
技术实现思路
1、本申请实施例提供了一种升降机械夹取装置,用以解决现有技术中机械手控制精度比较低,不适用于自动化程度高、精度要求比较严格的场景的问题。
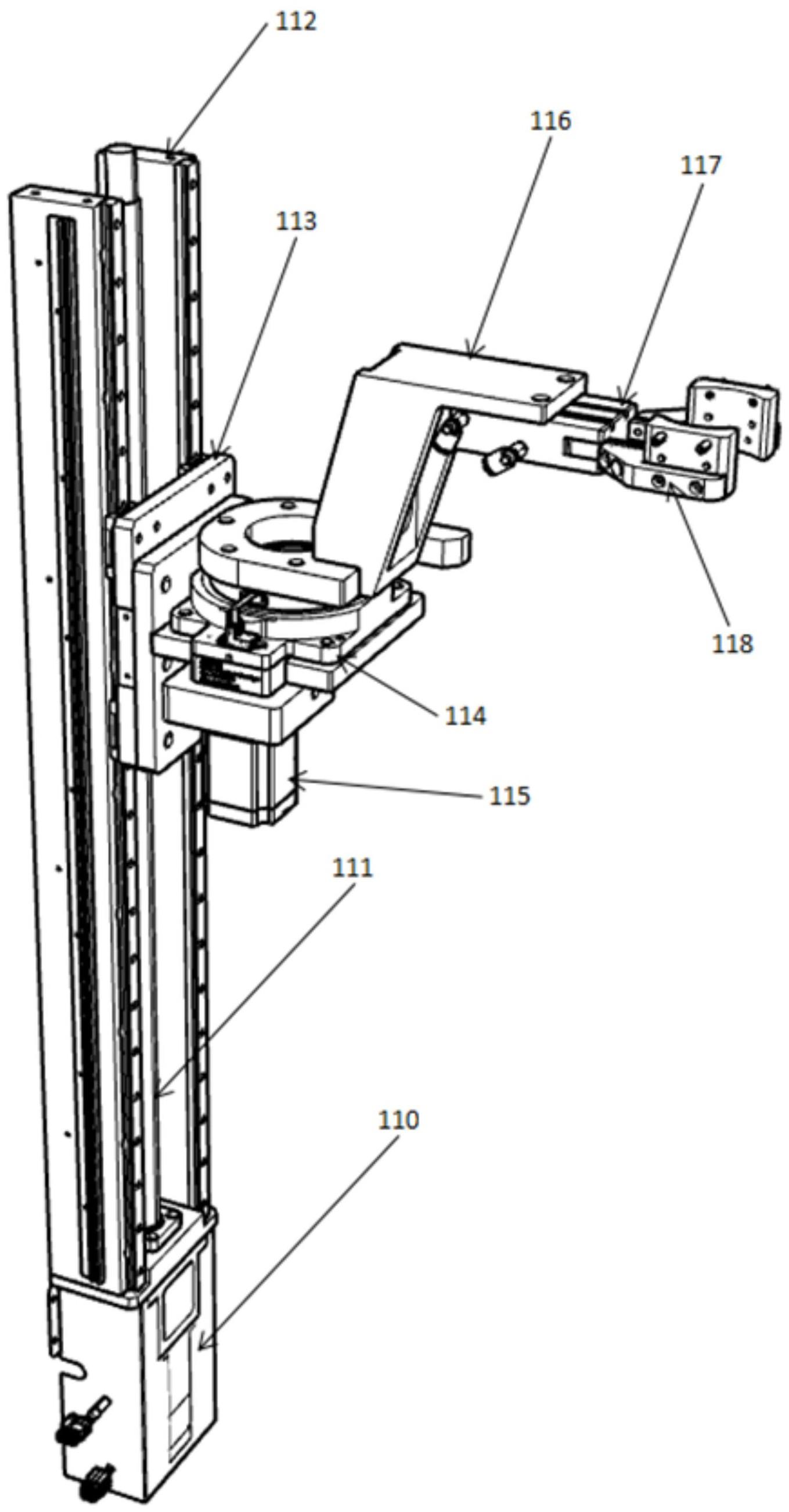
2、一方面,本申请实施例提供了一种升降机械夹取装置,包括:
3、导轨;
4、丝杆,转动设置在导轨上;
5、升降驱动单元,与丝杆连接,升降驱动单元用于驱动丝杆转动;
6、滑块,滑动设置在导轨上,且滑块与丝杆螺接,丝杆转动时滑块在导轨上升降;
7、旋转驱动单元,设置在滑块上;
8、减速单元,与旋转驱动单元传动连接,减速单元用于减缓旋转驱动单元输出的转速;
9、机械手,设置在减速单元上,机械手用于夹取物品。
10、本申请中的一种升降机械夹取装置,具有以下优点:
11、通过丝杆升降的方式能够实现高精度的升降控制,进一步结合减速单元后能够提高机械手转动时的控制精度,因此从升降和转动两个角度同时提高了夹取装置的控制精度。
技术特征:
1.一种升降机械夹取装置,其特征在于,包括:
2.根据权利要求1所述的一种升降机械夹取装置,其特征在于,所述升降驱动单元(110)的转轴通过联轴器与所述丝杆(111)直接连接,或所述升降驱动单元(110)的转轴与所述丝杆(111)传动连接。
3.根据权利要求2所述的一种升降机械夹取装置,其特征在于,所述升降驱动单元(110)的转轴通过齿轮或皮带与所述丝杆(111)传动连接。
4.根据权利要求3所述的一种升降机械夹取装置,其特征在于,所述齿轮为面齿轮或锥齿轮。
5.根据权利要求1所述的一种升降机械夹取装置,其特征在于,所述滑块(113)在朝向所述丝杆(111)的侧面上设置有螺母座,所述螺母座上设置有螺母,所述螺母螺接在所述丝杆(111)外侧面上。
6.根据权利要求1所述的一种升降机械夹取装置,其特征在于,所述减速单元(114)包括减速齿轮组和安装承台,所述减速齿轮组包括多个依次啮合的减速齿轮,其中起始端的所述减速齿轮与所述旋转驱动单元(115)传动连接,末尾端的所述减速齿轮与所述安装承台连接,所述机械手设置在所述安装承台上。
7.根据权利要求1所述的一种升降机械夹取装置,其特征在于,所述机械手包括:
技术总结
本申请公开了一种升降机械夹取装置,包括:导轨;丝杆,转动设置在导轨上;升降驱动单元,与丝杆连接,升降驱动单元用于驱动丝杆转动;滑块,滑动设置在导轨上,且滑块与丝杆螺接,丝杆转动时滑块在导轨上升降;旋转驱动单元,设置在滑块上;减速单元,与旋转驱动单元传动连接,减速单元用于减缓旋转驱动单元输出的转速;机械手,设置在减速单元上,机械手用于夹取物品。本申请通过丝杆升降的方式能够实现高精度的升降控制,进一步结合减速单元后能够提高机械手转动时的控制精度,因此从升降和转动两个角度同时提高了夹取装置的控制精度。
技术研发人员:乔木,李超,李克
受保护的技术使用者:融域智慧(西安)智能科技有限公司
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!