一种巡检机器人的制作方法
本发明涉及巡检设备的,尤其涉及一种巡检机器人。
背景技术:
1、巡检机器人是一种能够半自主或全自主工作的智能机器,机器人具有感知、决策、执行等基本特征,能够进行自定位、路径规划、智能感知、人脸识别、视频监控等行为,可以协助完成厂区内的监控巡逻保安工作,实现动态巡检、无死角监控、异常预警,有效避免人工巡检的各种弊端,辅助甚至替代人类完成危险、繁重、复杂的工作,提高工作效率与质量,服务人类生活,扩大或延伸人的活动及能力范围。
2、目前,在很多水电工厂厂区内都设有巡检机器人,来巡视监测厂区内的情况,但现有的巡检机器人自我防护的功能较差,在运行过程中受到外物意外撞击使时容易造成损坏,且现有的巡检机器人一般通过高清摄像头和红外成像探测器进行周围环境的巡检,但是,现有的高清摄像头和红外成像探测器缺少相应的保护结构处于裸露状态,尤其在在充电或长期处于久置状态无工作时,容易沾染灰尘,影响后续监测效果。
技术实现思路
1、本部分的目的在于概述本发明的实施例的一些方面以及简要介绍一些较佳实施例。在本部分以及本申请的说明书摘要和发明名称中可能会做些简化或省略以避免使本部分、说明书摘要和发明名称的目的模糊,而这种简化或省略不能用于限制本发明的范围。
2、鉴于上述现有巡检机器人存在的自我防护的功能较差,在运行过程中受到外物意外撞击使时容易造成损坏,且现有的高清摄像头和红外成像探测器缺少相应的保护结构处于裸露状态,尤其在在充电或长期处于久置状态无工作时,容易沾染灰尘的问题,提出了本发明。
3、因此,本发明目的是提供一种巡检机器人
4、为解决上述技术问题,本发明提供如下技术方案:一种巡检机器人,包括,
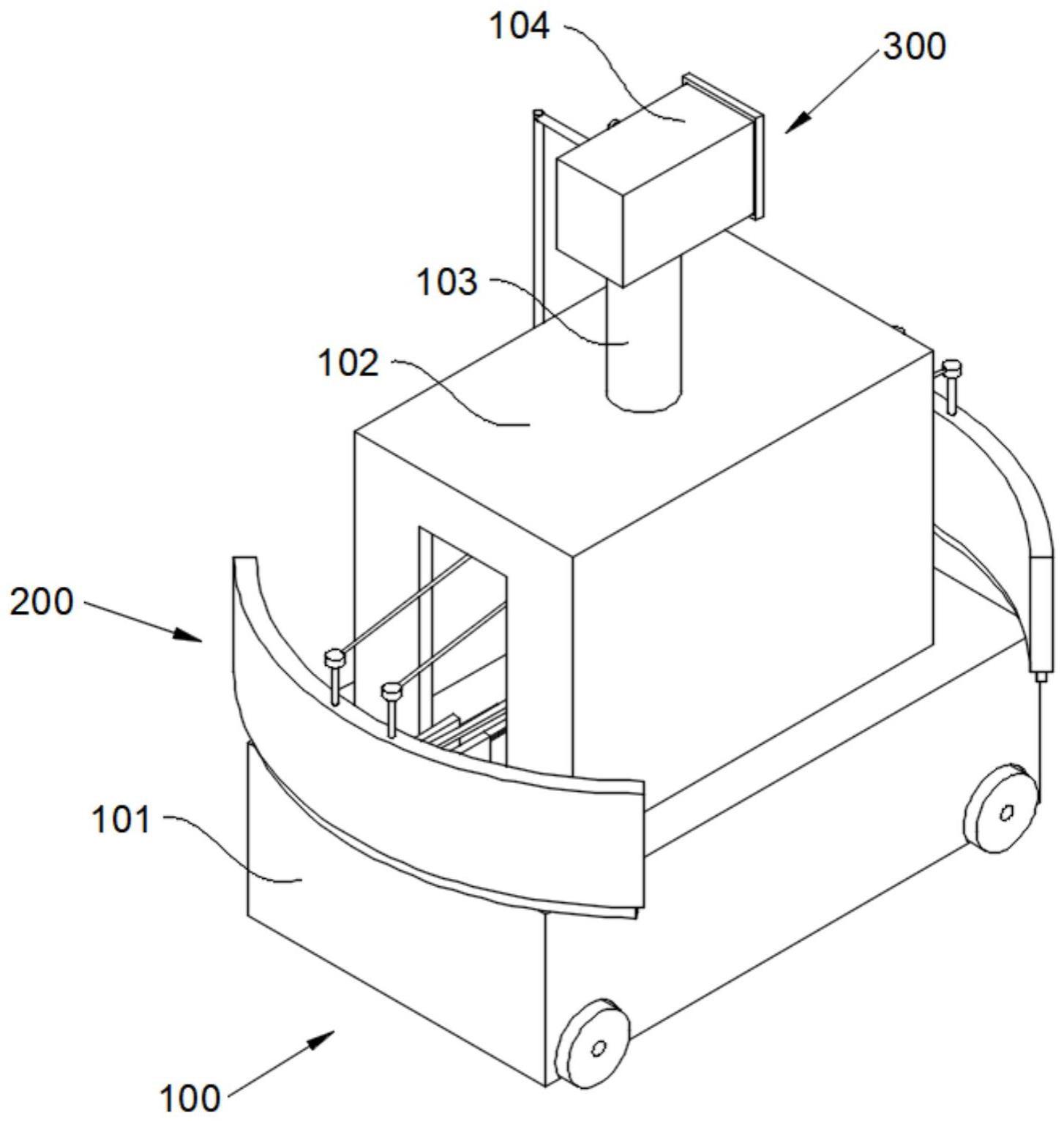
5、安装机构,包括底座、设置在所述底座顶部的安装罩、设置在所述安装罩顶部的安装柱、设置在所述安装柱顶部的摄像头本体,以及设置在所述摄像头本体内部的镜头;
6、防撞机构,包括设置在所述安装罩内的驱动组件,以及分别设置在所述驱动组件下端两侧的防冲击组件;以及,
7、防护机构,包括设置在所述摄像头本体一侧用于对镜头进行防护的两个防尘组件,两个所述防尘组件呈上下相对设置,且位于下方设置的一个所述防尘组件与驱动组件连接。
8、作为本发明所述巡检机器人的一种优选方案,其中:所述驱动组件包括设置在所述安装罩内顶壁上的气缸、设置在所述气缸输出端上的第一移动板、设置在所述第一移动板前后两侧的定位轮、设置在所述第一移动板底部的连接杆,以及设置在所述连接杆底部的第二移动板。
9、作为本发明所述巡检机器人的一种优选方案,其中:所述防冲击组件包括分别设置在所述第二移动板左右两侧的转动杆、设置在所述转动杆远离第二移动板一端的两个滑动杆、分别设置在两个所述滑动杆两侧的导向板、设置在两个所述滑动杆另一端的推板,以及设置在所述推板另一侧的缓冲件。
10、作为本发明所述巡检机器人的一种优选方案,其中:所述缓冲件包括设置在所述推板远离滑动杆一侧的弹性伸缩管、设置在所述弹性伸缩管另一端的上套板、设置在所述上套内的下滑板、设置在所述上套板上方且与所述下滑板顶部连接的移动杆,以及设置在左右相对的两个移动杆顶端之间的连接带,所述定位轮上设置有用于容纳连接带的环槽,所述上套板和所述下滑板均设置有为弧形状,所述安装罩的两侧均开设有用于连接带穿出的第一通槽。
11、作为本发明所述巡检机器人的一种优选方案,其中:两个所述推板的相背侧均设置有第一导柱,两个所述导向板的相对侧均设置有用于配合第一导柱滑动的第一导向槽。
12、作为本发明所述巡检机器人的一种优选方案,其中:所述防尘组件包括设置在所述摄像头本体一侧的转轴,自外往内依次设置在所述转轴上的扇形齿、第一转板和第二转板,设置在所述第一转板另一端的盖板,以及设置在所述第二转板另一端的第三转板,所述第三转板设置在所述摄像头本体内侧且另一端与镜头一侧连接。
13、作为本发明所述巡检机器人的一种优选方案,其中:两个所述防尘组件的扇形齿相啮合,且位于下方设置的所述扇形齿上设置有第四转板,所述第四转板的另一端通过联动杆与所述第二移动板连接,所述安装罩上设置有用于联动杆穿出的第二通槽。
14、作为本发明所述巡检机器人的一种优选方案,其中:所述镜头的上下两侧均设置有第二导柱,所述摄像头本体内部上下两侧均设置有用于配合第二导柱的滑动的第二导向槽。
15、作为本发明所述巡检机器人的一种优选方案,其中:所述摄像头本体一侧开设有两个分别用于上下两个第二转板转动的弧形槽。
16、作为本发明所述巡检机器人的一种优选方案,其中::所述盖板与所述摄像头本体端部滑动连接。
17、本发明的有益效果:通过气缸的伸缩驱动防冲击组件进行外扩和收缩,当两个冲击组件外扩至底座两端外侧时,可对巡检机器人两端进行防护,减少其运行过程中受到外物意外撞击的冲击力,同时通过气缸的伸缩可使防尘组件进行上下开合,从而可对镜头进行打开和封闭,防止镜头长期裸露在外沾染灰尘。
技术特征:
1.一种巡检机器人,其特征在于:包括,
2.根据权利要求1所述的巡检机器人,其特征在于:所述驱动组件(201)包括设置在所述安装罩(102)内顶壁上的气缸(201a)、设置在所述气缸(201a)输出端上的第一移动板(201b)、设置在所述第一移动板(201b)前后两侧的定位轮(201c)、设置在所述第一移动板(201b)底部的连接杆(201d),以及设置在所述连接杆(201d)底部的第二移动板(201e)。
3.根据权利要求2所述的巡检机器人,其特征在于:所述防冲击组件(202)包括分别设置在所述第二移动板(201e)左右两侧的转动杆(202a)、设置在所述转动杆(202a)远离第二移动板(201e)一端的两个滑动杆(202b)、分别设置在两个所述滑动杆(202b)两侧的导向板(202c)、设置在两个所述滑动杆(202b)另一端的推板(202d),以及设置在所述推板(202d)另一侧的缓冲件(202e)。
4.根据权利要求3所述的巡检机器人,其特征在于:所述缓冲件(202e)包括设置在所述推板(202d)远离滑动杆(202b)一侧的弹性伸缩管(202e-1)、设置在所述弹性伸缩管(202e-1)另一端的上套板(202e-2)、设置在所述上套内的下滑板(202e-3)、设置在所述上套板(202e-2)上方且与所述下滑板(202e-3)顶部连接的移动杆(202e-4),以及设置在左右相对的两个移动杆(202e-4)顶端之间的连接带(202e-5),所述定位轮(201c)上设置有用于容纳连接带(202e-5)的环槽,所述上套板(202e-2)和所述下滑板(202e-3)均设置有为弧形状,所述安装罩(102)的两侧均开设有用于连接带(202e-5)穿出的第一通槽。
5.根据权利要求4所述的巡检机器人,其特征在于:两个所述推板(202d)的相背侧均设置有第一导柱(202b-1),两个所述导向板(202c)的相对侧均设置有用于配合第一导柱(202b-1)滑动的第一导向槽。
6.根据权利要求3~5任一所述的巡检机器人,其特征在于:所述防尘组件(301)包括设置在所述摄像头本体(104)一侧的转轴(301a),自外往内依次设置在所述转轴(301a)上的扇形齿(301b)、第一转板(301c)和第二转板(301d),设置在所述第一转板(301c)另一端的盖板(301e),以及设置在所述第二转板(301d)另一端的第三转板(301f),所述第三转板(301f)设置在所述摄像头本体(104)内侧且另一端与镜头(105)一侧连接。
7.根据权利要求6所述的巡检机器人,其特征在于:两个所述防尘组件(301)的扇形齿(301b)相啮合,且位于下方设置的所述扇形齿(301b)上设置有第四转板(301g),所述第四转板(301g)的另一端通过联动杆(301h)与所述第二移动板(201e)连接,所述安装罩(102)上设置有用于联动杆(301h)穿出的第二通槽。
8.根据权利要求7所述的巡检机器人,其特征在于:所述镜头(105)的上下两侧均设置有第二导柱(105a),所述摄像头本体(104)内部上下两侧均设置有用于配合第二导柱(105a)的滑动的第二导向槽。
9.根据权利要求7或8所述的巡检机器人,其特征在于:所述摄像头本体(104)一侧开设有两个分别用于上下两个第二转板(301d)转动的弧形槽。
10.根据权利要求9所述的巡检机器人,其特征在于:所述盖板(301e)与所述摄像头本体(104)端部滑动连接。
技术总结
本发明涉及巡检设备的技术领域,尤其涉及一种巡检机器人。该巡检机器人,包括,安装机构,包括底座、设置在所述底座顶部的安装罩、设置在所述安装罩顶部的安装柱、设置在所述安装柱顶部的摄像头本体,以及设置在所述摄像头本体内部的镜头;防撞机构,包括设置在所述安装罩内的驱动组件,以及分别设置在所述驱动组件下端两侧的防冲击组件;以及,防护机构,包括设置在所述摄像头本体一侧用于对镜头进行防护的两个防尘组件,两个所述防尘组件呈上下相对设置,且位于下方设置的一个所述防尘组件与驱动组件连接,通过冲击组件的设置可对减小巡检机器人两端进行缓冲防护,通过防尘组件的设置对镜头进行封闭,防止其长期裸露在外沾染灰尘。
技术研发人员:王玉,陈启萍,吴凯,陈日伟,张举世,王波,张东,江雨,陈珂,彭俊先,陈霓,张颖鑫,鲍秀兴,官治浩,曹辉,杨雨
受保护的技术使用者:贵州乌江水电开发有限责任公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!