一种矿用液压机械臂的控制系统及方法与流程
本申请涉及机械臂控制领域,尤其涉及一种矿用液压机械臂的控制系统及方法。
背景技术:
1、目前伴随智能化煤矿建设需求,各煤矿企业对作业型机器人需求越发强烈,亟需解决危重作业场合机器人替人难题,包括监测、喷浆、管道安装、重物搬运等典型应用场景。
2、目前市场上大多数是工业领域机器人,符合地面上作业要求,缺少井下作业类机器人,缺少井下适用的防爆设计;现有机械臂包括电动臂、工程机械用液压机械臂及国内外的主从遥操作液压机械臂,都有各自的局限;电动臂和工程机械用液压机械臂臃肿、重量大、占地空间大;电动臂不易做到防爆设计,负载/自重比小,受限用于井下空间作业场景;国内外主从遥操作液压机械臂虽然体积小、重量轻,但其本体为轻质铝合金或钛合金,控制阀不防爆、控制精度达不到目前实际需求,无法应用在煤矿领域。
技术实现思路
1、本申请提供一种矿用液压机械臂的控制系统及方法,以至少解决控制阀不防爆、控制精度达不到目前实际需求的技术问题。
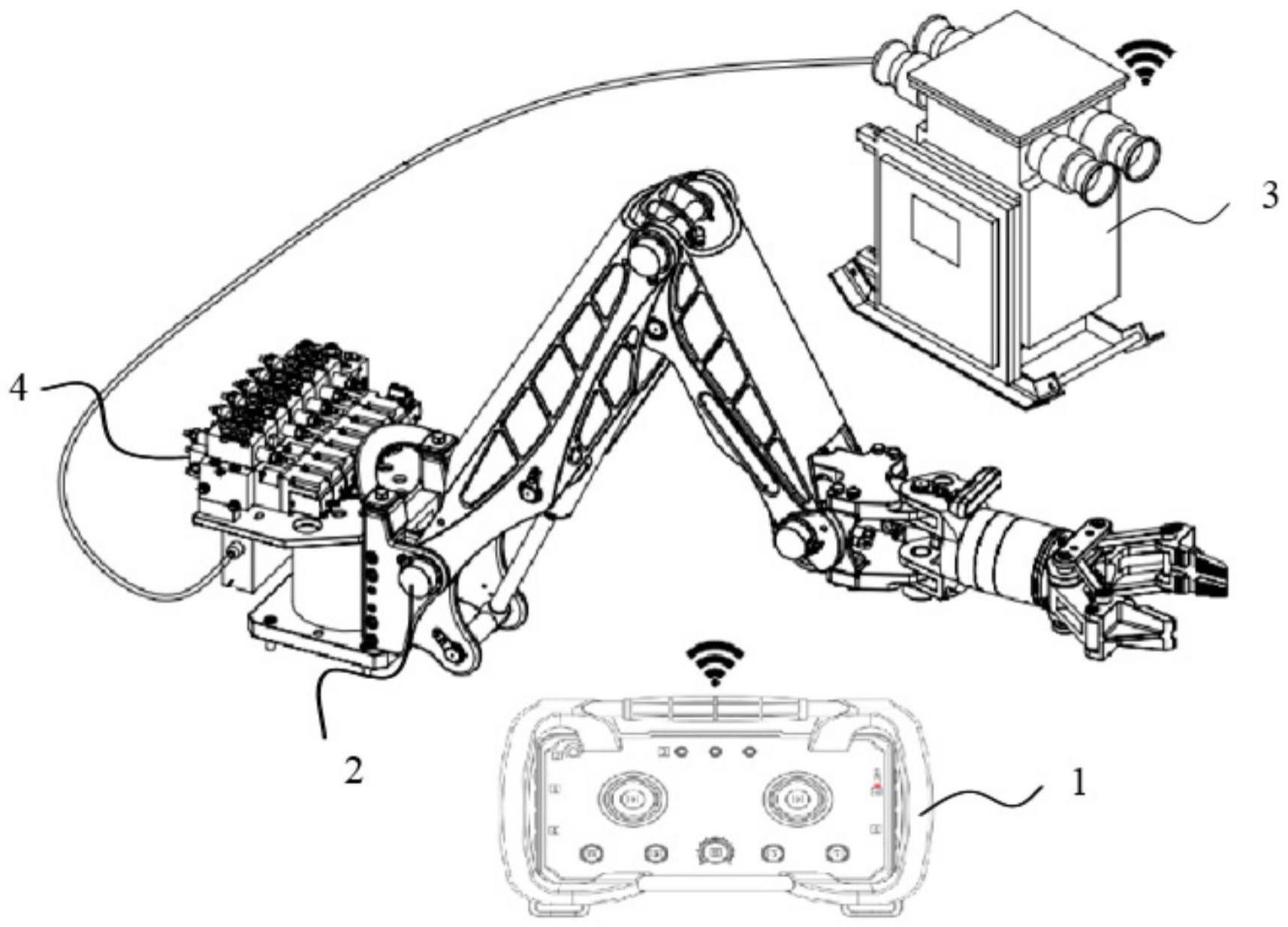
2、本申请第一方面实施例提出一种矿用液压机械臂的控制系统,包括:遥控装置、多个旋转变压器、隔爆型控制装置和液压控制组件;
3、所述遥控装置,用于将液压机械臂末端的轨迹参数发送到所述隔爆型控制装置;
4、多个所述旋转变压器分别安装在液压机械臂的各关节处,所述旋转变压器,用于采集液压机械臂关节的角度和速度值;
5、所述隔爆型控制装置,用于基于液压机械臂末端的轨迹参数生成液压机械臂各关节的控制目标值,并基于各关节的控制目标值、角度和速度值确定各关节的控制参考值,然后基于各关节的控制参考值控制所述液压控制组件工作;
6、所述液压控制组件,用于执行所述隔爆型控制装置的控制,驱动液压机械臂中液压执行件动作,实现液压机械臂作业。
7、优选的,所述控制系统还包括:解码器;
8、所述解码器,用于将所述液压机械臂关节的角度和速度值进行解码,并将解码后的角度和速度值发送到所述隔爆型控制装置。
9、进一步的,所述遥控装置通过无线连接的方式与所述隔爆型控制装置连接。
10、进一步的,所述控制系统还包括:视觉组件;
11、所述视觉组件设置在所述液压机械臂的腕部偏转关节上;
12、所述视觉组件,用于获取作业对象的位置信息,并将所述位置信息发送到所述隔爆型控制装置;
13、所述隔爆型控制装置,还用于基于所述作业对象的位置信息生成液压机械臂各关节的控制目标值,并基于所述控制目标值、角度和速度值确定各关节的控制参考值,并基于各关节的控制参考值控制所述液压控制组件工作。
14、进一步的,所述控制系统还包括:can总线;
15、所述解码器通过所述can总线将解码后的角度和速度值发送到所述隔爆型控制装置。
16、进一步的,所述液压控制组件,包括:本安型can总线电液比例阀和多联阀组;
17、所述本安型can总线电液比例阀集成有温度传感器和位移传感器;
18、所述本安型can总线电液比例阀,用于监测液压机械臂的状态;
19、所述本安型can总线电液比例阀,还用于对液压机械臂进行故障诊断;
20、所述多联阀组,分别用于控制液压机械臂各关节的移动。
21、进一步的,所述隔爆型控制装置,还用于基于所述控制参考值控制所述本安型can总线电液比例阀的输出流量。
22、进一步的,当所述液压机械臂所处环境为结构化环境时,利用视觉组件获取的作业对象的位置信息生成液压机械臂各关节的控制目标值,并基于所述控制目标值、角度和速度值确定各关节的控制参考值;
23、当所述液压机械臂所处环境为非结构化环境时,利用遥控装置发送到所述隔爆型控制装置的液压机械臂末端的轨迹参数生成液压机械臂各关节的控制目标值,并基于所述控制目标值、角度和速度值确定各关节的控制参考值。
24、本申请第二方面实施例提出一种矿用液压机械臂的控制方法,所述方法包括:
25、获取液压机械臂末端的轨迹参数、液压机械臂各关节的角度和速度值;
26、根据液压机械臂末端的轨迹参数生成液压机械臂各关节的控制目标值;
27、根据各关节的控制目标值、角度和速度值确定各关节的控制参考值;
28、基于所述各关节的控制参考值对液压机械臂进行控制。
29、本申请第三方面实施例提出一种计算机可读存储介质,其上存储有计算机程序,该程序被处理器执行时实现如第二方面实施例所述的方法。
30、本申请的实施例提供的技术方案至少带来以下有益效果:
31、本申请提出了一种矿用液压机械臂的控制系统及方法,其中所述系统包括:遥控装置、多个旋转变压器、隔爆型控制装置和液压控制组件;所述遥控装置,用于将液压机械臂末端的轨迹参数发送到所述隔爆型控制装置;多个所述旋转变压器分别安装在液压机械臂的各关节处,所述旋转变压器,用于采集液压机械臂关节的角度和速度值;所述隔爆型控制装置,用于基于液压机械臂末端的轨迹参数生成液压机械臂各关节的控制目标值,并基于各关节的控制目标值、角度和速度值确定各关节的控制参考值,然后基于各关节的控制参考值控制所述液压控制组件工作;所述液压控制组件,用于执行所述隔爆型控制装置的控制,驱动液压机械臂中液压执行件动作,实现液压机械臂作业。本申请提出的技术方案,具有防爆性能、同时抗干扰能力强、控制精度高。
32、本申请附加的方面以及优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本申请的实践了解到。
技术特征:
1.一种矿用液压机械臂的控制系统,其特征在于,包括:遥控装置、多个旋转变压器、隔爆型控制装置和液压控制组件;
2.如权利要求1所述的控制系统,其特征在于,所述控制系统还包括:解码器;
3.如权利要求2所述的控制系统,其特征在于,所述遥控装置通过无线连接的方式与所述隔爆型控制装置连接。
4.如权利要求3所述的控制系统,其特征在于,所述控制系统还包括:视觉组件;
5.如权利要求4所述的控制系统,其特征在于,所述控制系统还包括:can总线;
6.如权利要求5所述的控制系统,其特征在于,所述液压控制组件,包括:本安型can总线电液比例阀和多联阀组;
7.如权利要求6所述的控制系统,其特征在于,所述隔爆型控制装置,还用于基于所述控制参考值控制所述本安型can总线电液比例阀的输出流量。
8.如权利要求4所述的控制系统,其特征在于,当所述液压机械臂所处环境为结构化环境时,利用视觉组件获取的作业对象的位置信息生成液压机械臂各关节的控制目标值,并基于所述控制目标值、角度和速度值确定各关节的控制参考值;
9.一种基于上述权利要求1-8任一所述的矿用液压机械臂的控制系统的矿用液压机械臂的控制方法,其特征在于,所述方法包括:
10.一种计算机可读存储介质,其上存储有计算机程序,其特征在于,该程序被处理器执行时实现如权利要求9所述的方法。
技术总结
本申请提出一种矿用液压机械臂的控制系统及方法,所述系统包括:遥控装置、多个旋转变压器、隔爆型控制装置和液压控制组件;所述遥控装置,用于将液压机械臂末端的轨迹参数发送到所述隔爆型控制装置;多个旋转变压器分别安装在液压机械臂各关节处,所述旋转变压器,用于采集液压机械臂关节的角度和速度值;隔爆型控制装置,用于基于液压机械臂末端的轨迹参数生成液压机械臂各关节的控制目标值,并基于各关节的控制目标值、角度和速度值确定各关节的控制参考值,然后基于各关节的控制参考值控制所述液压控制组件工作;所述液压控制组件,用于执行所述隔爆型控制装置的控制,实现液压机械臂作业。本申请提出的技术方案,抗干扰能力强、控制精度高。
技术研发人员:赵玉贝,韦文术,王伟,吴会刚,姚卓,康岩,李向波,叶壮
受保护的技术使用者:北京天玛智控科技股份有限公司
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!