一种基于六轴机械臂焊接轨迹规划的算法的制作方法
本发明涉及机械臂路径规划,具体为一种基于六轴机械臂焊接轨迹规划的算法。
背景技术:
1、机械臂是指高精度、多输入多输出、高度非线性、强耦合的复杂系统,近年来,随着机器人技术的发展,应用高速度、高精度、高负载自重比的机器人结构受到工业和航空航天领域的关注,因其独特的操作灵活性,机械臂已在工业装配、安全防爆等领域得到广泛应用,但现有的六轴机械臂的轨迹规划中,没有考虑到机械臂的奇异点与自碰撞点,容易出现抖动与自碰撞的情况;现有的六轴机械臂的轨迹规划中,由于缺少避障功能,导致其难以适应实际加工环境;现有的六轴机械臂的轨迹规划,其轨迹优化能力单一,且优化效率不高。
技术实现思路
1、本发明的目的在于提供一种基于六轴机械臂焊接轨迹规划的算法,以解决上述背景技术中提出的问题。
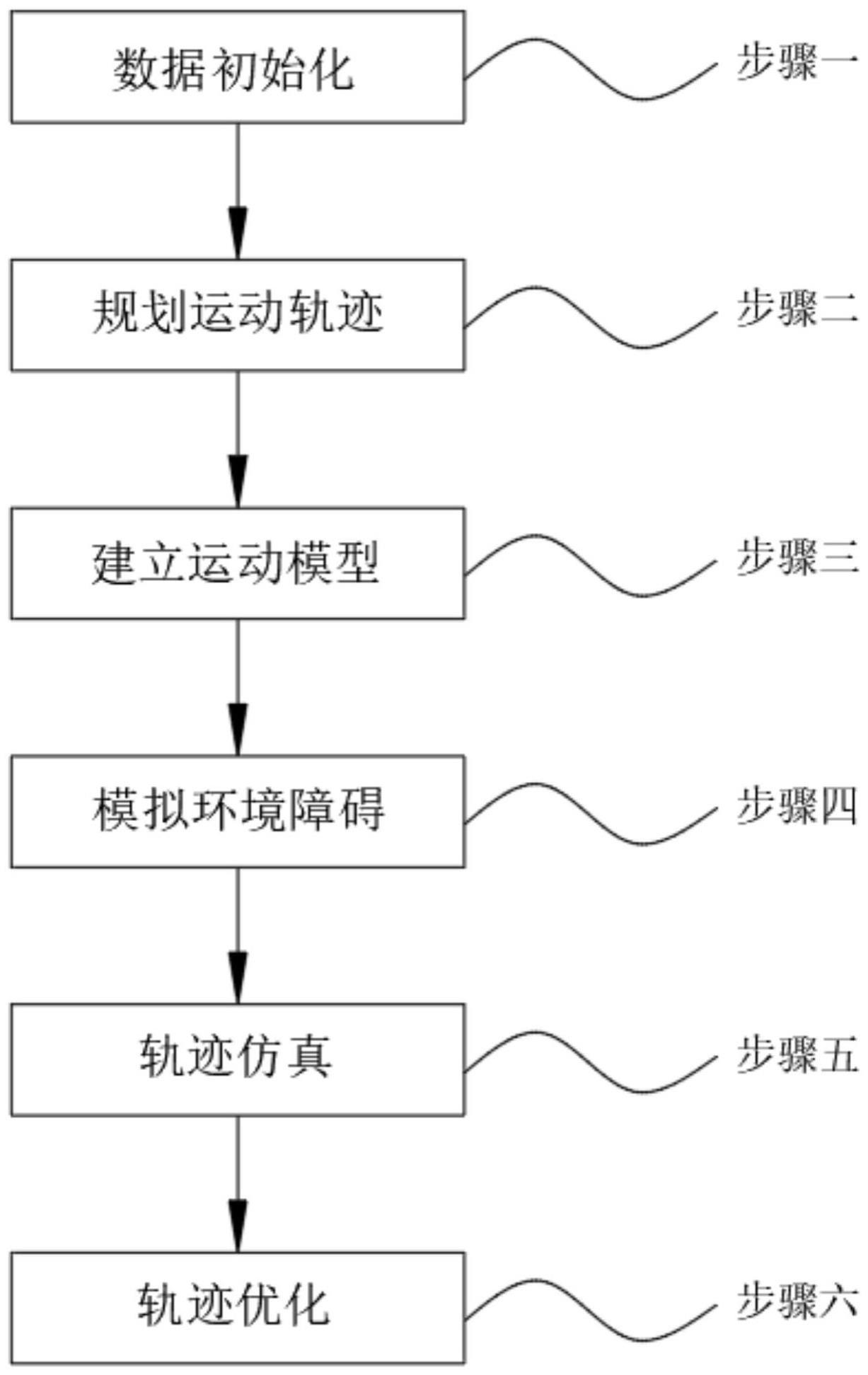
2、为实现上述目的,本发明提供如下技术方案:一种基于六轴机械臂焊接轨迹规划的算法,包括以下步骤:步骤一,数据初始化;步骤二,规划运动轨迹;步骤三,建立运动模型;步骤四,模拟环境障碍;步骤五,轨迹仿真;步骤六,轨迹优化;
3、其中在上述步骤一中,首先获得六轴机械臂的末端起点,以及途径焊接点的位姿;
4、其中在上述步骤二中,根据机械臂起始点与途径焊接节点规划机械臂运动路径;
5、其中在上述步骤三中,结合步骤二中得出的运动轨迹来建立机械臂关节的运动模型;
6、其中在上述步骤四中,在运动模型中加入随机障碍,来模拟真实焊接场景,并通过避障训练来提高机械臂的自主避障能力;
7、其中在上述步骤五中,使用matlab软件来对上述运动轨迹进行仿真,得到各类直观的运动参数;
8、其中在上述步骤六中,采用不同的算法对运动轨迹进行轨迹优化,并根据实际操作中具体的需求将不同优化结果进行加权处理,得到所需要的运动轨迹规划。
9、优选的,所述步骤一中,采用d-h法描述机械臂的位姿,建立机械臂的连杆坐标系,并确定其d-h参数,在获取各个节点的位姿之后,还需要输入每个轴关节的关节约束条件,其中包括关节速度、关节加速度、关节力矩以及关节脉动。
10、优选的,所述步骤二中,在不出现路径节点重复的情况下,将机械臂末端起点与各个焊接节点连接成运动轨迹,将所有连接而成的运动轨迹进行集合即为路径规划。
11、所述步骤三中,采用obb包围盒算法,并使用建模软件建立机械臂的运动模型。
12、优选的,所述步骤四中,在避障训练中,首先需要扫描障碍物,确定障碍物主体,并根据障碍物体积比,去除占比小于5%的突出部分,建立表面规则的障碍物模型,获得障碍物中心与机械臂运动轨迹的交界点,以该点为准将机械臂前端向侧方位移,位移距离为障碍物中心到交界点的1.5-2倍。
13、优选的,所述步骤五中,仿真所得到的运动参数包括各运动轨迹对应的运动路径、运动时间与运动稳定性。
14、优选的,所述步骤六中,运动轨迹的优化算法包括粒子群算法与改进遗传算法。
15、优选的,所述步骤六中,不同优化结果是根据不同优化策略的制定所得出,其中,优化策略包括运动路径优化、运动时间优化与机械臂稳定优化,之后便可以根据具体的优化需求来定制优化算法。
16、优选的,所述机械臂稳定优化指的是各个关节运动时加速度的控制,以避免机械臂关节的急启、急停。
17、与现有技术相比,本发明的有益效果是:本发明相较于现有的六轴机械臂的轨迹规划算法,通过添加对轴关节的关节约束条件,以避免机械臂运动至奇异点或自碰撞点,防止其剧烈抖动或自碰撞;本发明通过模拟加工环境中的障碍并进行迭代训练的方式,使其实现自动避障的功能,能够更好地适应实际加工环境;本发明通过不同算法结合不同优化策略进行轨迹优化,提高了其适用性与优化效率。
技术特征:
1.一种基于六轴机械臂焊接轨迹规划的算法,包括以下步骤:步骤一,数据初始化;步骤二,规划运动轨迹;步骤三,建立运动模型;步骤四,模拟环境障碍;步骤五,轨迹仿真;步骤六,轨迹优化;其特征在于:
2.根据权利要求1所述的一种基于六轴机械臂焊接轨迹规划的算法,其特征在于:所述步骤一中,采用d-h法描述机械臂的位姿,建立机械臂的连杆坐标系,并确定其d-h参数,在获取各个节点的位姿之后,还需要输入每个轴关节的关节约束条件,其中包括关节速度、关节加速度、关节力矩以及关节脉动。
3.根据权利要求1所述的一种基于六轴机械臂焊接轨迹规划的算法,其特征在于:所述步骤二中,在不出现路径节点重复的情况下,将机械臂末端起点与各个焊接节点连接成运动轨迹,将所有连接而成的运动轨迹进行集合即为路径规划。
4.根据权利要求1所述的一种基于六轴机械臂焊接轨迹规划的算法,其特征在于:所述步骤三中,采用0bb包围盒算法,并使用建模软件建立机械臂的运动模型。
5.根据权利要求1所述的一种基于六轴机械臂焊接轨迹规划的算法,其特征在于:所述步骤四中,在避障训练中,首先需要扫描障碍物,确定障碍物主体,并根据障碍物体积比,去除占比小于5%的突出部分,建立表面规则的障碍物模型,获得障碍物中心与机械臂运动轨迹的交界点,以该点为准将机械臂前端向侧方位移,位移距离为障碍物中心到交界点的1.5-2倍。
6.根据权利要求1所述的一种基于六轴机械臂焊接轨迹规划的算法,其特征在于:所述步骤五中,仿真所得到的运动参数包括各运动轨迹对应的运动路径、运动时间与运动稳定性。
7.根据权利要求1所述的一种基于六轴机械臂焊接轨迹规划的算法,其特征在于:所述步骤六中,运动轨迹的优化算法包括粒子群算法与改进遗传算法。
8.根据权利要求1所述的一种基于六轴机械臂焊接轨迹规划的算法,其特征在于:所述步骤六中,不同优化结果是根据不同优化策略的制定所得出,其中,优化策略包括运动路径优化、运动时间优化与机械臂稳定优化,之后便可以根据具体的优化需求来定制优化算法。
9.根据权利要求8所述的一种基于六轴机械臂焊接轨迹规划的算法,其特征在于:所述机械臂稳定优化指的是各个关节运动时加速度的控制,以避免机械臂关节的急启、急停。
技术总结
本发明公开了一种基于六轴机械臂焊接轨迹规划的算法,包括以下步骤:步骤一,数据初始化;步骤二,规划运动轨迹;步骤三,建立运动模型;步骤四,模拟环境障碍;步骤五,轨迹仿真;步骤六,轨迹优化;所述步骤六中,运动轨迹的优化算法包括粒子群算法与改进遗传算法,本发明相较于现有的六轴机械臂的轨迹规划算法,通过添加对轴关节的关节约束条件,以避免机械臂运动至奇异点或自碰撞点,防止其剧烈抖动或自碰撞;本发明通过模拟加工环境中的障碍并进行迭代训练的方式,使其实现自动避障的功能,能够更好地适应实际加工环境;本发明通过不同算法结合不同优化策略进行轨迹优化,提高了其适用性与优化效率。
技术研发人员:吴志平
受保护的技术使用者:深圳市定向三维科技有限公司
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!