一种机器人自动存取源罐的3D视觉抓取搬运系统的制作方法
本发明涉及六轴工业机器人抓取搬运,尤其涉及一种机器人自动存取源罐的3d视觉抓取搬运系统。
背景技术:
1、目前石油测井用的放射源(中子源、伽马源)都在铅罐中封存,装有放射源的铅罐都统一存储在源库的源坑内,目前从源坑内取出或者存放铅罐都是靠室内行车进行抓取存放,但是行车只能将铅罐放置在转运小车上,从小车上往运源车上放需要人工将铅罐抬起放入运源车的源舱内,这样增加了工人的劳动强度,同时增加了受放射性物质辐射的风险,自动化和智能化程度较低,如果仅仅使用搬运六轴工业机器人,则无法实现对摆放位置不固定的物料进行搬运,因为运源车每次停车的位置不是固定不变的,单纯通过对六轴工业机器人的示教无法实现对物料的精准定位从而完成精准抓取。
技术实现思路
1、本发明的目的是为了解决现有技术中存在的缺点,而提出的一种机器人自动存取源罐的3d视觉抓取搬运系统。
2、为了实现上述目的,本发明采用了如下技术方案:一种机器人自动存取源罐的3d视觉抓取搬运系统,包括六轴工业机器人,所述六轴工业机器人的一侧设置有相机支架,所述相机支架的表面安装有3d视觉相机,所述六轴工业机器人的一端安装有机器人抓手,所述六轴工业机器人的一侧设置有运源车源舱,所述运源车源舱的顶部分别安装有中子罐托盘和伽马罐托盘,所述伽马罐托盘的表面设置有伽马罐本体,所述中子罐托盘的表面设置有中子罐本体,所述六轴工业机器人相对于运源车源舱的一侧设置有料盘。
3、为了稳定伽马罐本体和中子罐本体,本发明改进有,所述中子罐托盘和伽马罐托盘的一侧均设置有围挡。
4、为了稳定伽马罐本体和中子罐本体,本发明改进有,所述料盘的表面安装有凸起状的定位座。
5、为了辅助安装六轴工业机器人,本发明改进有,所述六轴工业机器人的底部固装有安装板。
6、与现有技术相比,本发明的优点和积极效果在于,
7、本发明中,实际使用时,通过设置六轴工业机器人、相机支架、3d视觉相机、机器人抓手、运源车源舱、中子罐托盘、伽马罐托盘、伽马罐本体、中子罐本体和料盘,通过六轴工业机器人与3d视觉相机的相互结合,六轴工业机器人根据3d视觉相机拍照成像的三维点云图与数据库中的模型进行匹配,最终将物料的空间坐标发送给六轴工业机器人,引导六轴工业机器人自动运行到抓取位进行抓取,这种3d视觉相机成像后将物料的抓取方位坐标给六轴工业机器人,六轴工业机器人获取坐标信息后准确的移动到物料抓取位进行抓取,解决了运源车停车位置不准,导致六轴工业机器人无法准确抓取物料的问题,提高了六轴工业机器人抓取的精度,从而提高了工作效率,同时实现了当前石油测井行业中源罐从库房取还源至运源车上的全自动化过程,降低了员工接触放射性物质从而造成损害的风险。
技术特征:
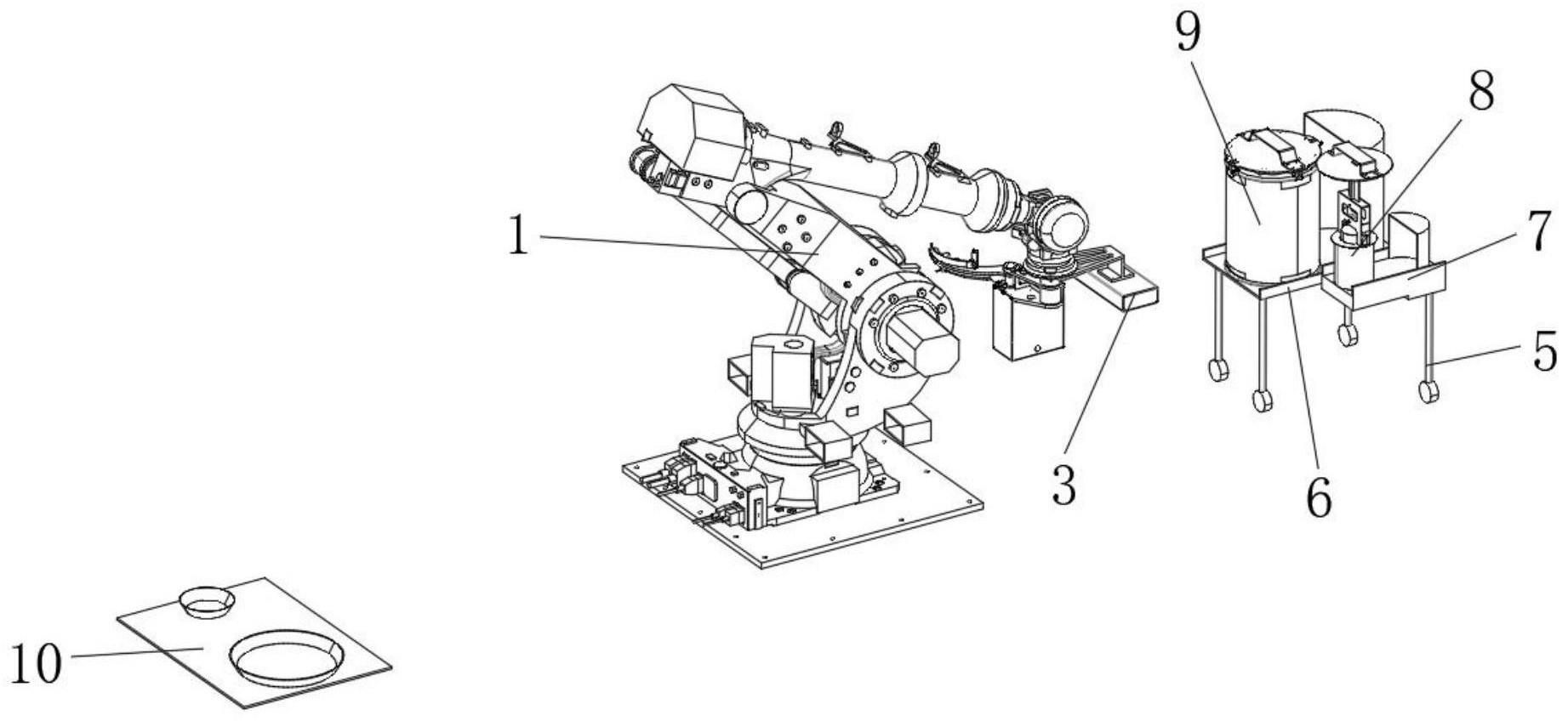
1.一种机器人自动存取源罐的3d视觉抓取搬运系统,包括六轴工业机器人(1),其特征在于:所述六轴工业机器人(1)的一侧设置有相机支架(2),所述相机支架(2)的表面安装有3d视觉相机(3),所述六轴工业机器人(1)的一端安装有机器人抓手(4),所述六轴工业机器人(1)的一侧设置有运源车源舱(5),所述运源车源舱(5)的顶部分别安装有中子罐托盘(6)和伽马罐托盘(7),所述伽马罐托盘(7)的表面设置有伽马罐本体(8),所述中子罐托盘(6)的表面设置有中子罐本体(9),所述六轴工业机器人(1)相对于运源车源舱(5)的一侧设置有料盘(10)。
2.根据权利要求1所述的机器人自动存取源罐的3d视觉抓取搬运系统,其特征在于:所述中子罐托盘(6)和伽马罐托盘(7)的一侧均设置有围挡。
3.根据权利要求1所述的机器人自动存取源罐的3d视觉抓取搬运系统,其特征在于:所述料盘(10)的表面安装有凸起状的定位座。
4.根据权利要求1所述的机器人自动存取源罐的3d视觉抓取搬运系统,其特征在于:所述六轴工业机器人(1)的底部固装有安装板。
技术总结
本发明提供一种机器人自动存取源罐的3D视觉抓取搬运系统,涉及六轴工业机器人抓取搬运技术领域,包括六轴工业机器人,所述六轴工业机器人的一侧设置有相机支架,所述相机支架的表面安装有3D视觉相机,所述六轴工业机器人的一端安装有机器人抓手,所述六轴工业机器人的一侧设置有运源车源舱,所述运源车源舱的顶部分别安装有中子罐托盘和伽马罐托盘,实际使用时,通过设置六轴工业机器人、相机支架、3D视觉相机、机器人抓手、运源车源舱、中子罐托盘、伽马罐托盘、伽马罐本体、中子罐本体和料盘,通过六轴工业机器人与3D视觉相机的相互结合,解决了运源车停车位置不准,导致六轴工业机器人无法准确抓取物料的问题。
技术研发人员:曾双,郭书亭
受保护的技术使用者:北京聚惠云端科技有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!