机器人及机器人系统的制作方法
本发明涉及机器人及机器人系统。
背景技术:
1、专利文献1中公开了工业用机器人,该工业用机器人具备通过旋转关节机构串联地连结多个连杆而成的臂结构。此外,公开了各旋转关节机构具有减速机以及驱动减速机的伺服电机。特别是,在串联地连结三个以上的连杆而成的多关节机器人的情况下,使用两个以上的伺服电机。
2、专利文献1:日本特开2005-262340号公报
3、多关节机器人所使用的多个伺服电机用于彼此不同的关节机构。各关节机构串联地连接,负荷的大小彼此不同。然而,在未使用与负荷的大小相符的适当的伺服电机的情况下,存在多关节机器人的动作速度、位置精度等动作性能降低的技术问题。
技术实现思路
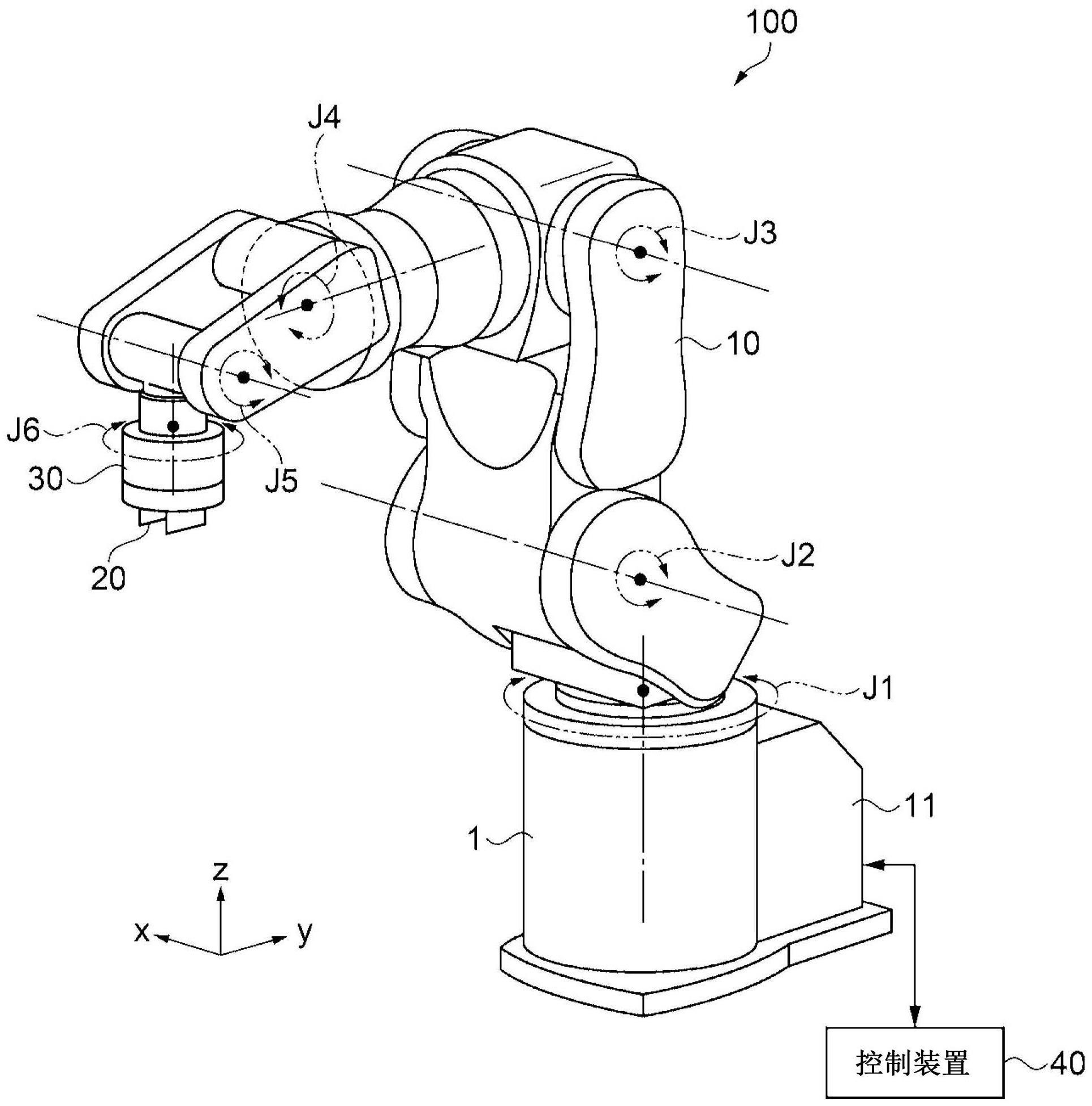
1、本发明的适用例所涉及的机器人的特征在于,所述机器人是多关节机器人,所述多关节机器人具备:机械手,具有所述多个关节;以及基座,支承所述机械手,在所述多关节机器人中,所述关节具备电机,所述电机具有呈以旋转轴为中心轴的圆环状的励磁和电枢,当将沿着所述旋转轴的轴向的所述励磁的长度设为h、将所述励磁的外半径设为r、将h/r设为所述励磁的纵横比、将多个所述关节中最靠所述基座侧的关节具有的所述电机设为基端电机、将多个所述关节中最前端侧的关节具有的所述电机设为前端电机时,所述基端电机具有的所述励磁与所述前端电机具有的所述励磁相比,所述纵横比更小。
2、本发明的适用例所涉及的机器人系统的特征在于,具备:本发明的适用例所涉及的机器人;以及移动架台,使所述机器人移动。
技术特征:
1.一种机器人,其特征在于,是多关节机器人,所述多关节机器人具备:
2.根据权利要求1所述的机器人,其特征在于,
3.根据权利要求1或2所述的机器人,其特征在于,
4.根据权利要求1或2所述的机器人,其特征在于,
5.根据权利要求1或2所述的机器人,其特征在于,
6.一种机器人系统,其特征在于,具备:
技术总结
本发明公开了机器人及机器人系统,提供一种选择根据多关节机器人的关节的位置而具有适当的特性的电机且动作性能及输出効率优良的机器人以及具备该机器人的机器人系统。机器人的特征在于,该机器人是多关节机器人,具备:机械手,具有多个关节;以及基座,支承机械手,关节具备电机,该电机具有呈以旋转轴为中心轴的圆环状的励磁和电枢,当将沿着旋转轴的轴向的励磁的长度设为h、将励磁的外半径设为R、将h/R设为励磁的纵横比、将多个关节中最靠基座侧的关节具有的电机设为基端电机、将多个关节中最前端侧的关节具有的电机设为前端电机时,基端电机具有的励磁与前端电机具有的励磁相比,纵横比更小。
技术研发人员:冲田太志
受保护的技术使用者:精工爱普生株式会社
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!