一种SCARA机器人及其控制方法与流程
本发明涉及机器人,尤其涉及一种scara机器人。
背景技术:
1、scara(selective compliance assembly robot arm)机器人在工作过程时,由于使用不当或者当机器人程序调试时考虑不全面,可能会导致机器人基座、限位块、丝杆互相发生碰撞的情况(以下简称碰撞),高速碰撞下可能会导致机器人零部件损坏,从而影响机器人正常运行。
技术实现思路
1、为克服相关技术中scara机器人在运行时零部件在发生碰撞后容易发生损坏的问题,本发明提出了一种scara机器人及其控制方法。
2、本发明实施例第一方面提出了一种scara机器人,scara机器人,包括:
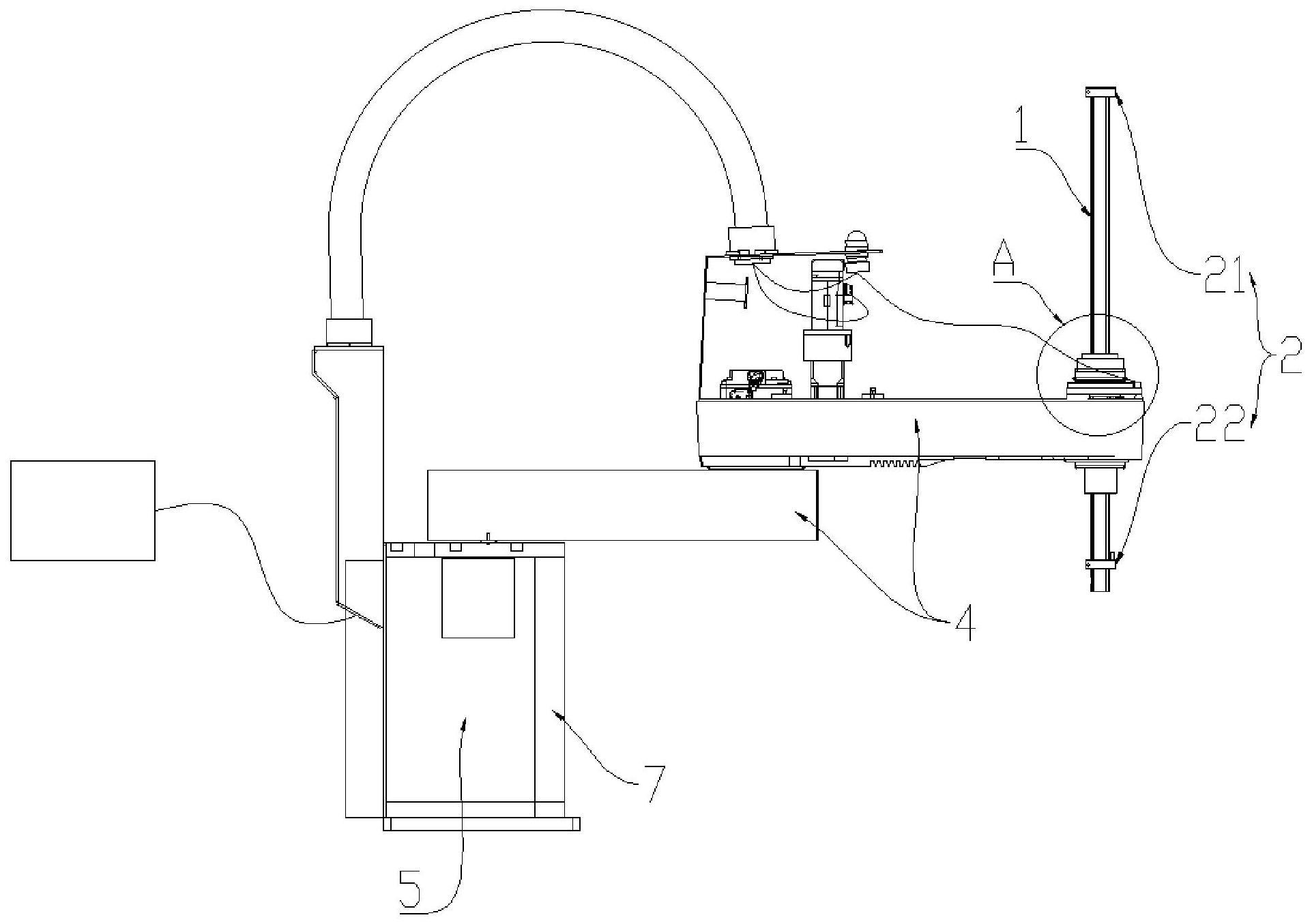
3、丝杠组件,丝杠组件包括丝杠、设于丝杠上的限位件以及与丝杠螺纹传动配合的丝杠母,丝杠与丝杠母螺纹传动配合时丝杠可带动限位件相对丝杠母做直线运动;
4、机械臂,用于带动丝杠、丝杠母和限位件整体绕机械臂的旋转中心做公转运动;
5、基座,基座设置在限位件的公转运动方向上;
6、其中,在丝杠的直线运动方向上设有第一缓冲装置、在丝杠的公转运动方向上设有第二缓冲装置,第一缓冲装置设于丝杠母上,第二缓冲装置设于基座上。
7、在上述的技术方案中,第一缓冲装置具有对丝杠母进行防护的第一开启状态以及撤销对丝杠母防护的第一关闭状态;
8、第二缓冲装置具有对基座进行防护的第二开启状态以及撤销对基座防护的第二关闭状态,其中;
9、第一缓冲装置可根据限位件与丝杠母之间的距离执行第一开启状态或第一关闭状态;
10、第二缓冲装置可根据限位件与基座之间的距离执行第二开启状态或第二关闭状态。
11、在上述的技术方案中,机器人还包括:
12、距离传感器,距离传感器用于监测:限位件与丝杠母之间的距离以及限位件与基座之间的距离;
13、控制器,控制器被配置为:根据接收到的限位件与丝杠母之间的距离信息控制第一缓冲装置执行第一开启状态或第一关闭状态;和/或根据接收到的限位件与基座之间的距离信息控制第二缓冲装置执行第二开启状态或第二关闭状态。
14、在上述的技术方案中,限位件包括设于丝杠上的上限位件和下限位件,上限位件和下限位件位于丝杠母的上下两侧;
15、距离传感器包括第一距离传感器和第二距离传感器,第一距离传感器用于监测上限位件与丝杠母之间的距离,第二距离传感器用于监测下限位件与基座之间的距离。
16、在上述的技术方案中,第一距离传感器设于丝杠母上,用于监测上限位件与丝杠母在竖直方向上的距离;
17、第二距离传感器设于下限位件上,用于监测下限位件与丝杠母在水平方向上的距离。
18、在上述的技术方案中,第一缓冲装置和第二缓冲装置为伸缩式缓冲装置;
19、第一缓冲装置具有伸展形式的第一开启状态和收缩形式的第一关闭状态;
20、第二缓冲装置具有伸展形式的第二开启状态和收缩形式的第二关闭状态;
21、第一缓冲装置处于第一开启状态时,第一缓冲装置伸展并凸伸于丝杠母的上方;
22、第二缓冲装置处于第二开启状态时,第二缓冲装置伸展并环设于基座的外周。
23、在上述的技术方案中,第一缓冲装置包括第一可伸缩耗能防撞层、伸缩举升组件和固定装置,固定装置固设于丝杠母上,伸缩举升组件与第一可伸缩耗能防撞层连接;
24、第二缓冲装置包括固定桩、第二可伸缩耗能防撞层、伸缩头、电机、驱动组件、滑轮和导轨,固定桩固设于基座底部一侧,第二可伸缩耗能防撞层的一侧与固定桩连接、另一侧与伸缩头连接,伸缩头中设有电机,电机的输出端连接驱动组件,驱动组件的底部设有滑轮,导轨沿基座的外部轮廓铺设,滑轮滑动设置于导轨中。
25、在上述的技术方案中,机器人还包括:
26、报警装置,报警装置在第一缓冲装置处于第一开启状态和/或第二缓冲装置处于第二开启状态时开启;
27、报警装置包括报警指示灯和蜂鸣器;
28、刹车装置,刹车装置用于控制丝杠组件的运行和停止;
29、其中第一缓冲装置处于第一开启状态和/或第二缓冲装置处于第二开启状态时开启时,刹车装置控制丝杠组件停止运行。
30、本发明实施例第二方面提出了一种scara机器人的控制方法,应用于上述的scara机器人,控制方法包括:
31、在机器人运行过程中;
32、获取上限位块与丝杠母之间的距离h1,获取下限位块与基座之间的距离h2;
33、根据上限位块与丝杠母之间的距离h1值选择是否开启第一缓冲装置,根据下限位块与基座之间的距离h2值选择是否开启第二缓冲装置。
34、在上述的任一实施方式中,根据上限位块与丝杠母之间的距离h1值选择是否开启第一缓冲装置,根据下限位块与基座之间的距离h2值选择是否开启第二缓冲装置的方法包括:
35、获取上限位块与丝杠母之间的距离h1并与第一预设最小安全距离h设1进行比对,获取下限位块与基座之间的距离h2并与第二预设最小安全距离h设2进行比对;
36、若h1≤h设1时,启动第一缓冲装置;
37、若h2≤h设2时,启动第二缓冲装置;
38、其中h设1>0,h设2>0。
39、在上述的技术方案中,第一预设最小安全距离h设1和第二预设最小安全距离h设2可根据丝杠的运动速度进行自适应调整。
40、在上述的技术方案中,第一预设最小安全距离h设1和第二预设最小安全距离h设2可根据丝杠的运动速度进行自适应调整的方法包括:
41、获取丝杠在竖直运动方向上的运动速度v1,基于运动速度v1对第一预设最小安全距离进行调整;
42、获取丝杠在公转运动方向上的运动速度v2,基于运动速度v2对第二预设最小安全距离进行调整。
43、在上述的技术方案中,第一预设最小安全距离h设1和第二预设最小安全距离h设2可根据丝杠的运动速度进行自适应调整的方法还包括:
44、获取第一缓冲装置的伸展速度v3,获取第二缓冲装置的伸展速度v4;
45、基于运动速度v1和伸展速度v3对第一预设最小安全距离进行调整;
46、基于运动速度v2和伸展速度v4对第二预设最小安全距离进行调整。
47、在上述的技术方案中,在第一缓冲装置和/或第二缓冲装置启动时,报警装置启动、刹车装置启动。
48、采用上述技术方案后,本发明与现有技术相比具有以下有益效果:
49、一、本发明实施例中通过在丝杆母和基座上分别设置缓冲装置,能够有效降低机器人零部件之间发生高速碰撞的碰撞力,从而不会使碰撞导致零部件的丧失正常使用能力,进而提高机器人运行的安全性和可靠性。
技术特征:
1.一种scara机器人,其特征在于,包括:
2.根据权利要求1所述的机器人,其特征在于,
3.根据权利要求2所述的机器人,其特征在于,所述机器人还包括:
4.根据权利要求3所述的机器人,其特征在于,所述限位件(2)包括设于所述丝杠(1)上的上限位件(21)和下限位件(22),所述上限位件(21)和所述下限位件(22)位于所述丝杠母(3)的上下两侧;
5.根据权利要求4所述的机器人,其特征在于;
6.根据权利要求1-5中任一项所述的机器人,其特征在于,所述第一缓冲装置(6)和所述第二缓冲装置(6)为伸缩式缓冲装置;
7.根据权利要求6所述的机器人,其特征在于,
8.根据权利要求1所述的机器人,其特征在于,所述机器人还包括:
9.一种scara机器人的控制方法,应用于权利要求1-8中任一项所述的scara机器人,其特征在于,所述控制方法包括:
10.根据权利要求9所述的控制方法,其特征在于,根据上限位块与丝杠母之间的距离h1值选择是否开启第一缓冲装置,根据下限位块与基座之间的距离h2值选择是否开启第二缓冲装置的方法包括:
11.根据权利要求10所述的控制方法,其特征在于,所述第一预设最小安全距离h设1和所述第二预设最小安全距离h设2可根据所述丝杠的运动速度进行自适应调整。
12.根据权利要求11所述的控制方法,其特征在于,所述第一预设最小安全距离h设1和所述第二预设最小安全距离h设2可根据所述丝杠的运动速度进行自适应调整的方法包括:
13.根据权利要求12所述的控制方法,其特征在于,所述第一预设最小安全距离h设1和所述第二预设最小安全距离h设2可根据所述丝杠的运动速度进行自适应调整的方法还包括:
14.根据权利要求9-13中任一项所述的控制方法,其特征在于,在所述第一缓冲装置和/或所述第二缓冲装置启动时,报警装置启动、刹车装置启动。
技术总结
本发明提供一种SCARA机器人及其控制方法,属于机器人技术领域。包括:丝杠组件,丝杠组件包括丝杠、设于丝杠上的限位件以及与丝杠螺纹传动配合的丝杠母;机械臂,用于带动丝杠、丝杠母和限位件整体绕机械臂的旋转中心做公转运动;基座,基座设置在限位件的公转运动方向上;其中,在丝杠的直线运动方向上设有第一缓冲装置、在丝杠的公转运动方向上设有第二缓冲装置,第一缓冲装置设于丝杠母上,第二缓冲装置设于基座上。本发明中通过在丝杆母和基座上分别设置缓冲装置,能够有效降低机器人零部件之间发生高速碰撞的碰撞力,从而不会使碰撞导致零部件的丧失正常使用能力,进而提高机器人运行的安全性和可靠性。
技术研发人员:姜鑫,孔令超
受保护的技术使用者:珠海格力电器股份有限公司
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!