加油接头的抓取装置及机器人的制作方法
本申请涉及机器人末端工具,尤其涉及一种加油接头的抓取装置及机器人。
背景技术:
1、目前飞机航油加注通常采用人工作业的方式,工作人员需要抱持加油接头、并将加油接头提升至机翼受油口的下方,使加油接头与机翼受油口对接安装,由于加油接头及连接于加油接头的油管的重量较大,而在加油接头与机翼受油口的对接安装过程中,工作人员需要持续托举加油接头,如此工作强度较大,不便于人工操作。
技术实现思路
1、本申请提供一种加油接头的抓取装置及机器人,可以利用抓取装置实现加油接头的抓取。
2、本申请提供一种加油接头的抓取装置,其中包括:
3、主体部,用于固定于外部结构;
4、至少两个抓取部,所述抓取部可活动地设置于所述主体部;其中,至少两个所述抓取部的活动方向不同,活动方向不同的至少两个所述抓取部的活动方向的延伸线相交于一点;
5、所述抓取部包括第一端和第二端,所述第一端相对于所述第二端靠近所述主体部的顶端;所述抓取装置具有初始状态和收紧状态,当所述抓取装置处于所述收紧状态时,活动方向不同的至少两个所述抓取部的第二端相对于所述初始状态靠近彼此。
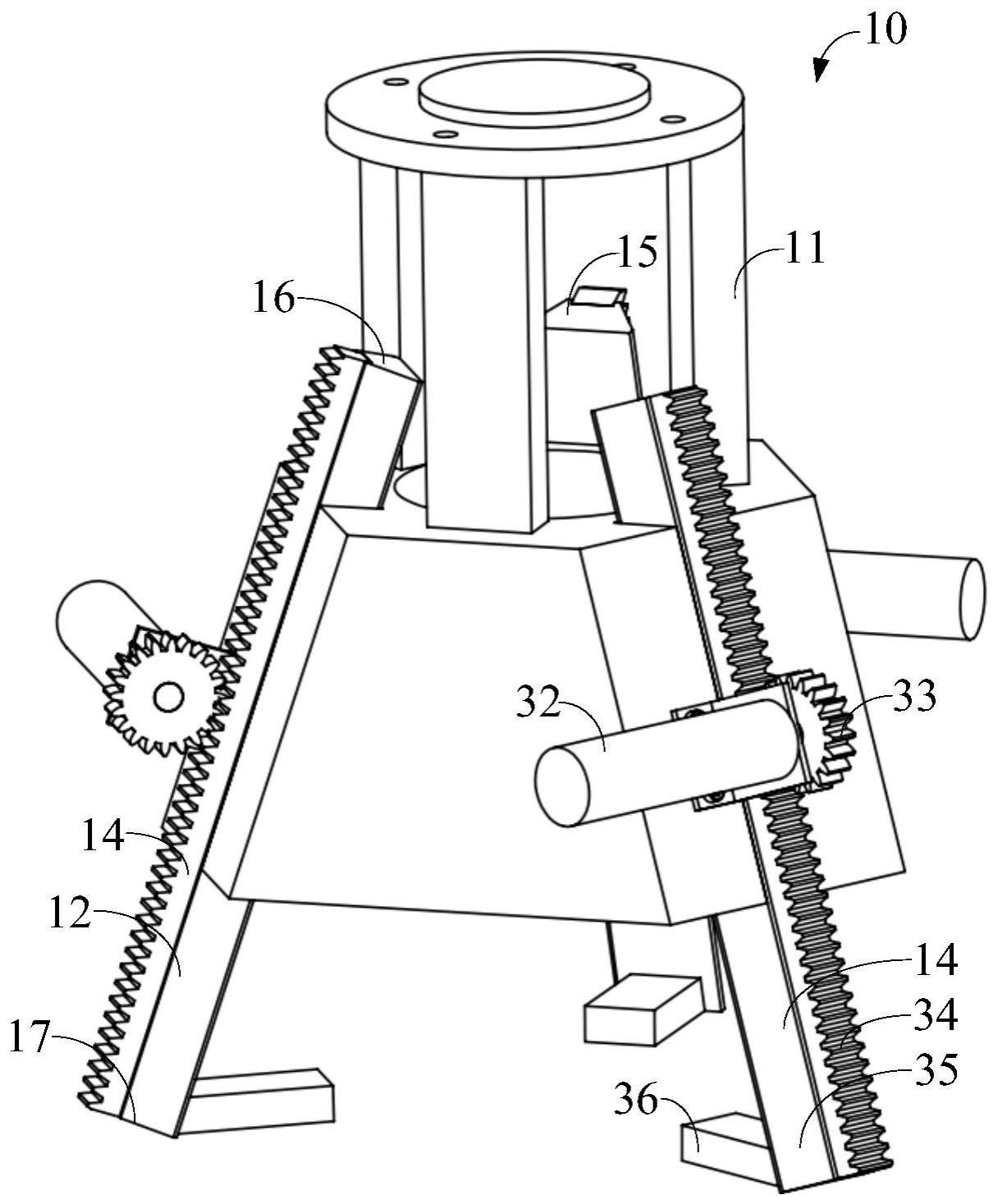
6、进一步地,所述主体部包括第一部分,所述第一部分的侧部设置有安装槽;所述安装槽自所述主体部的顶端至所述主体部的底端朝外侧倾斜延伸、并贯通所述第一部分;所述抓取部可活动地设置于所述安装槽内。
7、进一步地,所述安装槽包括槽口、与所述槽口相对的槽底及连接于所述槽口与所述槽底之间的第一侧面和第二侧面;所述第一侧面和所述第二侧面相对设置;所述第一侧面和所述第二侧面自所述槽口至所述槽底、朝远离彼此的方向倾斜延伸。
8、进一步地,所述第一部分包括顶面、与所述顶面相对的底面和连接于顶面和底面之间的侧周壁,所述侧周壁自所述顶面至所述底面的方向朝外侧倾斜延伸;其中,所述顶面和所述底面的形状为多边形。
9、进一步地,所述主体部还包括第二部分;所述第二部分包括接头部和至少两个连接部,所述至少两个连接部沿所述接头部的周向均匀排布;所述接头部用于固定于外部结构,所述连接部连接于所述接头部和所述第一部分、且位于相邻的两个所述安装槽之间。
10、进一步地,还包括驱动组件,所述驱动组件设置于所述第一部分;所述驱动组件连接于所述抓取部,以使所述抓取部可活动地设置于所述安装槽内。
11、进一步地,所述驱动组件包括电机和齿轮,所述抓取部包括齿条;所述电机的输出端连接于所述齿轮,用于驱动所述齿轮转动;所述齿轮和所述齿条配合连接,以使所述齿条沿所述安装槽的延伸方向可活动地设置于所述安装槽。
12、进一步地,所述抓取部包括固定件,所述齿条设置于所述固定件的顶面;所述固定件沿所述安装槽的延伸方向可活动地设置于所述安装槽内;其中,所述固定件的底面贴合于所述安装槽的底面,所述固定件的侧面贴合于所述安装槽的侧面。
13、进一步地,所述至少两个抓取部关于所述主体部的中心旋转对称设置。
14、本申请提供一种机器人,其中包括如上述任一实施例所述的加油接头的抓取装置。
15、本申请提供的加油接头的抓取装置,当抓取装置处于初始状态时,至少两个抓取部可以套接于加油接头;当抓取装置处于收紧状态时,至少两个抓取部的第二端相对于初始状态靠近彼此,使得两个抓取部可以抓取加油接头,如此可以利用抓取装置抓取加油接头,无需人工抱持加油接头,使得操作更加简单,实现了加油接头抓取动作的自动化。
16、应当理解的是,以上的一般描述和后文的细节描述仅是示例性和解释性的,并不能限制本申请。
技术特征:
1.一种加油接头的抓取装置,其特征在于,包括:
2.根据权利要求1所述的加油接头的抓取装置,其特征在于,所述主体部包括第一部分,所述第一部分的侧部设置有安装槽;所述安装槽自所述主体部的顶端至所述主体部的底端朝外侧倾斜延伸、并贯通所述第一部分;所述抓取部可活动地设置于所述安装槽内。
3.根据权利要求2所述的加油接头的抓取装置,其特征在于,所述安装槽包括槽口、与所述槽口相对的槽底及连接于所述槽口与所述槽底之间的第一侧面和第二侧面;所述第一侧面和所述第二侧面相对设置;所述第一侧面和所述第二侧面自所述槽口至所述槽底、朝远离彼此的方向倾斜延伸。
4.根据权利要求2所述的加油接头的抓取装置,其特征在于,所述第一部分包括顶面、与所述顶面相对的底面和连接于顶面和底面之间的侧周壁,所述侧周壁自所述顶面至所述底面的方向朝外侧倾斜延伸;其中,所述顶面和所述底面的形状为多边形。
5.根据权利要求2所述的加油接头的抓取装置,其特征在于,所述主体部还包括第二部分;所述第二部分包括接头部和至少两个连接部,所述至少两个连接部沿所述接头部的周向均匀排布;所述接头部用于固定于外部结构,所述连接部连接于所述接头部和所述第一部分、且位于相邻的两个所述安装槽之间。
6.根据权利要求2所述的加油接头的抓取装置,其特征在于,还包括驱动组件,所述驱动组件设置于所述第一部分;所述驱动组件连接于所述抓取部,以使所述抓取部可活动地设置于所述安装槽内。
7.根据权利要求6所述的加油接头的抓取装置,其特征在于,所述驱动组件包括电机和齿轮,所述抓取部包括齿条;所述电机的输出端连接于所述齿轮,用于驱动所述齿轮转动;所述齿轮和所述齿条配合连接,以使所述齿条沿所述安装槽的延伸方向可活动地设置于所述安装槽。
8.根据权利要求7所述的加油接头的抓取装置,其特征在于,所述抓取部包括固定件,所述齿条设置于所述固定件的顶面;所述固定件沿所述安装槽的延伸方向可活动地设置于所述安装槽内;其中,所述固定件的底面贴合于所述安装槽的底面,所述固定件的侧面贴合于所述安装槽的侧面。
9.根据权利要求1所述的加油接头的抓取装置,其特征在于,所述至少两个抓取部关于所述主体部的中心旋转对称设置。
10.一种机器人,其特征在于,包括如权利要求1-9任一项所述的加油接头的抓取装置。
技术总结
本申请提供一种加油接头的抓取装置及机器人,抓取装置包括主体部和至少两个抓取部。主体部用于固定于外部结构。抓取部可活动地设置于主体部。其中,至少两个抓取部的活动方向不同,活动方向不同的至少两个抓取部的活动方向的延伸线相交于一点。抓取部包括第一端和第二端,第一端相对于第二端靠近主体部的顶端。抓取装置具有初始状态和收紧状态,当抓取装置处于收紧状态时,活动方向不同的至少两个抓取部的第二端相对于初始状态靠近彼此。如此可以利用抓取装置抓取加油接头,无需人工抱持加油接头,使得操作更加简单,实现了加油接头抓取动作的自动化。
技术研发人员:黄腾飞,万广荣,孙超,裘函,于慧洋,王雷,廖赫
受保护的技术使用者:中国航空油料集团有限公司
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!