适应多轨道的自主避障巡检机器人
本发明涉及巡检机器人领域,特别是适应多轨道的自主避障巡检机器人。
背景技术:
1、对轨道交通进行检修时,通常采用人工巡检的方式,工人携带工具沿着轨道徒步检修,这会给工人造成较大的工作压力,现有技术中提出了一种检修车,例如授权公告号为cn214265456u的中国实用新型专利,公开了一种轨道交通用检修工具,包括机架和第一固定组件。机架包括工作台、支撑腿、连接杆和移动轮。工作台的前后两侧均设置有推杆,连接杆的中段转动连接在支撑腿的下端。连接杆的一端固设有第二限位凸起,移动轮位于第二限位凸起和支撑腿之间。第一固定组件,包括第一卡块和第二卡块。第一卡块和第二卡块共同配合以夹持管材。支撑腿、连接杆、移动轮和推杆的设置,方便轨道交通用检修工具沿铁轨的移动。在现有的轨道中,其轨距并不相同,而该类检修车两侧的移动轮为固定结构,并不能适用不同轨距的轨道,降低了使用的灵活性。
技术实现思路
1、本发明的目的在于,提供适应多轨道的自主避障巡检机器人。本发明能够调节两侧行进组件之间的距离,适应不同轨距的轨道,提高使用的灵活性。
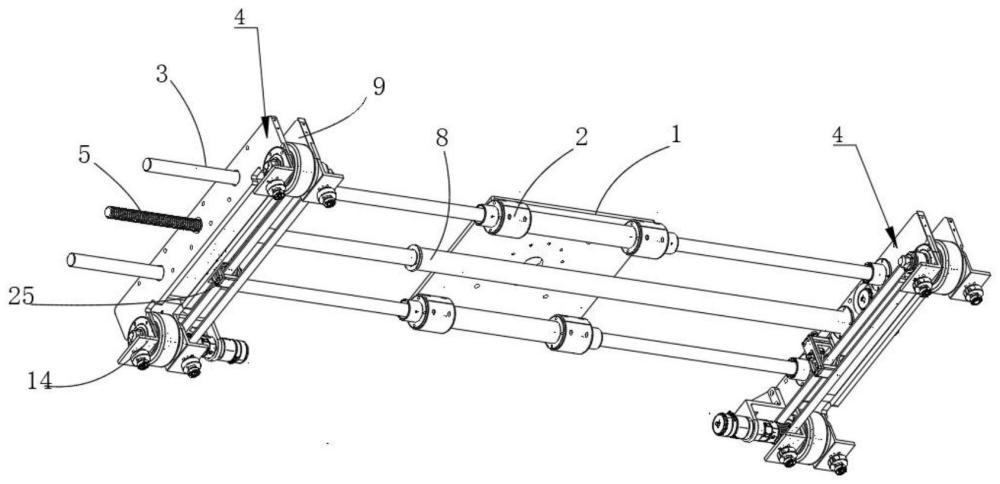
2、本发明的技术方案:适应多轨道的自主避障巡检机器人,包括用于放置传感器的底座平台,所述底座平台底部两侧设有管体夹紧座,管体夹紧座内设有光轴,所述的光轴两端设有与轨道配合的行进组件,一侧行进组件与光轴一端相固定,另一侧行进组件与光轴为活动连接,所述与光轴相固定的行进组件中间部且位于两侧光轴之间设有梯形丝杠,所述与光轴相固定的行进组件内设有丝杠电机,丝杠电机的伸出端经带传动与梯形丝杠的一端相连接,所述的与光轴活动连接的行进组件内设有与梯形丝杠相配合的移动法兰座。
3、上述的适应多轨道的自主避障巡检机器人中,所述梯形丝杠上设有防护套。
4、前述的适应多轨道的自主避障巡检机器人中,所述的行进组件包括主体座,主体座一端侧部设有电机支架,电机支架上设有轨道轮电机,主体座的两端经轴承设有转轴,转轴上设有轨道轮,轨道轮电机的伸出端经联轴器与一端的转轴相连接,两侧转轴经带传动相连接,主体座一侧设有且紧贴传动带处设有张紧机构,所述的主体座上且位于轨道轮的两侧设有辅助限位组件,辅助限位组件与轨道轮相贴合。
5、前述的适应多轨道的自主避障巡检机器人中,所述主体座包括一个块体,块体两侧经螺钉连接有侧板。
6、前述的适应多轨道的自主避障巡检机器人中,所述的辅助限位组件包括设置在主体座侧部的限位侧轮支架,限位侧轮支架上设有侧轮轴套,侧轮轴套下部经螺纹连接有轮轴,轮轴与侧轮轴套的连接处设有螺纹夹紧套,轮轴上设有辅助侧轮。
7、前述的适应多轨道的自主避障巡检机器人中,所述的电机支架上设有肋板。
8、前述的适应多轨道的自主避障巡检机器人中,所述的侧板且靠近限位侧轮支架处设有弧形凹槽,所述的限位侧轮支架上端设有圆弧部,圆弧部设置在弧形凹槽内。
9、前述的适应多轨道的自主避障巡检机器人中,所述的张紧机构包括设置在主体座一侧的张紧座体,张紧座体内设有可活动调节的张紧光轮座,张紧座体上端经螺纹连接有调节杆,调节杆与张紧光轮座上端相连接,张紧光轮座内经轴承设有光轮,光轮与传动带相贴合。
10、与现有技术相比,本发明具有以下的优点:
11、1、本发明中,根据实际轨道之间的轨距,调节两个行进组件之间的距离,一侧行进组件为固定,调节时移动另一侧行进组件,丝杠电机启动,经过带传动使得梯形丝杠转动,另一侧的行进组件内有与梯形丝杠配合的移动法兰座,移动法兰座位移,使得单侧行进组件移动,实现两侧行进组件的间距调整到与实际轨道符合的程度;通过调节两侧行进组件之间的距离,适应不同轨距的轨道,提高使用的灵活性。
12、2、所述的梯形丝杠为主要的调节动力组件,丝杠的螺纹较为关键,设置防护套是为了保护丝杠上附着灰尘或者其他杂质,影响梯形丝杠的传动配合。
13、3、所述的辅助限位组件结构简单,安装方便,能够较好的贴合轨道,使得行进组件稳定前进。
技术特征:
1.适应多轨道的自主避障巡检机器人,包括用于放置传感器的底座平台(1),其特征在于:所述底座平台(1)底部两侧设有管体夹紧座(2),管体夹紧座(2)内设有光轴(3),所述的光轴(3)两端设有与轨道配合的行进组件(4),一侧行进组件(4)与光轴(3)一端相固定,另一侧行进组件(4)与光轴(3)为活动连接,所述与光轴(3)相固定的行进组件(4)中间部且位于两侧光轴(3)之间设有梯形丝杠(5),所述与光轴(3)相固定的行进组件(4)内设有丝杠电机(6),丝杠电机(6)的伸出端经带传动与梯形丝杠(5)的一端相连接,所述的与光轴(3)活动连接的行进组件(4)内设有与梯形丝杠(5)相配合的移动法兰座(7)。
2.根据权利要求1所述的适应多轨道的自主避障巡检机器人,其特征在于:所述梯形丝杠(5)上设有防护套(8)。
3.根据权利要求1所述的适应多轨道的自主避障巡检机器人,其特征在于:所述的行进组件(4)包括主体座(9),主体座(9)一端侧部设有电机支架(10),电机支架(10)上设有轨道轮电机(11),主体座(9)的两端经轴承设有转轴(12),转轴(12)上设有轨道轮(13),轨道轮电机(11)的伸出端经联轴器与一端的转轴(12)相连接,两侧转轴(12)经带传动相连接,主体座(9)一侧设有且紧贴传动带处设有张紧机构(25),所述的主体座(9)上且位于轨道轮(13)的两侧设有辅助限位组件(14),辅助限位组件(14)与轨道轮(13)相贴合。
4.根据权利要求3所述的适应多轨道的自主避障巡检机器人,其特征在于:所述主体座(9)包括一个块体(15),块体(15)两侧经螺钉连接有侧板(16)。
5.根据权利要求4所述的适应多轨道的自主避障巡检机器人,其特征在于:所述的辅助限位组件(14)包括设置在主体座(9)侧部的限位侧轮支架(17),限位侧轮支架(17)上设有侧轮轴套(18),侧轮轴套(18)下部经螺纹连接有轮轴(19),轮轴(19)与侧轮轴套(18)的连接处设有螺纹夹紧套(20),轮轴(19)上设有辅助侧轮(21)。
6.根据权利要求3所述的适应多轨道的自主避障巡检机器人,其特征在于:所述的电机支架(10)上设有肋板(22)。
7.根据权利要求5所述的适应多轨道的自主避障巡检机器人,其特征在于:所述的侧板(16)且靠近限位侧轮支架(17)处设有弧形凹槽(23),所述的限位侧轮支架(17)上端设有圆弧部(24),圆弧部(24)设置在弧形凹槽(23)内。
8.根据权利要求3所述的适应多轨道的自主避障巡检机器人,其特征在于:所述的张紧机构(25)包括设置在主体座(9)一侧的张紧座体(26),张紧座体(26)内设有可活动调节的张紧光轮座(27),张紧座体(26)上端经螺纹连接有调节杆(28),调节杆(28)与张紧光轮座(27)上端相连接,张紧光轮座(27)内经轴承设有光轮(29),光轮(29)与传动带相贴合。
技术总结
本发明公开了适应多轨道的自主避障巡检机器人,包括用于放置传感器的底座平台(1),所述底座平台(1)底部两侧设有管体夹紧座(2),管体夹紧座(2)内设有光轴(3),所述的光轴(3)两端设有与轨道配合的行进组件(4),一侧行进组件(4)与光轴(3)一端相固定,另一侧行进组件(4)与光轴(3)为活动连接,所述与光轴(3)相固定的行进组件(4)中间部且位于两侧光轴(3)之间设有梯形丝杠(5)。本发明能够调节两侧行进组件之间的距离,适应不同轨距的轨道,提高使用的灵活性。
技术研发人员:丁智,闫晨博,胡乾崴,万安平,刘璨贤,王文晖,吴中杰
受保护的技术使用者:浙大城市学院
技术研发日:
技术公布日:2024/4/7
- 还没有人留言评论。精彩留言会获得点赞!