一种驱动箱分离的可升降连续型机器人
本发明涉及连续型机器人,特别是涉及一种驱动箱分离的可升降连续型机器人。
背景技术:
1、连续型机器人是一种具有高灵活性和柔顺性的仿生机器人。相较于传统刚性机器人,连续型机器人具有无限自由度、环境适应性强、交互安全性更高的优点。现有连续型机器人与驱动电箱构成一个整体,由于驱动部分体积较大,限制了连续型机器人的应用场景。连续型机器人理论上具有无限运动自由度,但一般的连续型机器人臂体部分的运动自由度全部为弯曲自由度,没有进给和旋转等其它运动自由度,限制了连续型机器人的可操作性和工作空间。
技术实现思路
1、本发明的目的是提供一种驱动箱分离的可升降连续型机器人,以解决上述现有技术存在的问题,在不影响连续型机器人性能的前提下实现了连续型机器人的适用性的提高,自由度的增加,可操作性的提升和工作空间的扩展。
2、为实现上述目的,本发明提供了如下方案:本发明提供一种驱动箱分离的可升降连续型机器人,包括
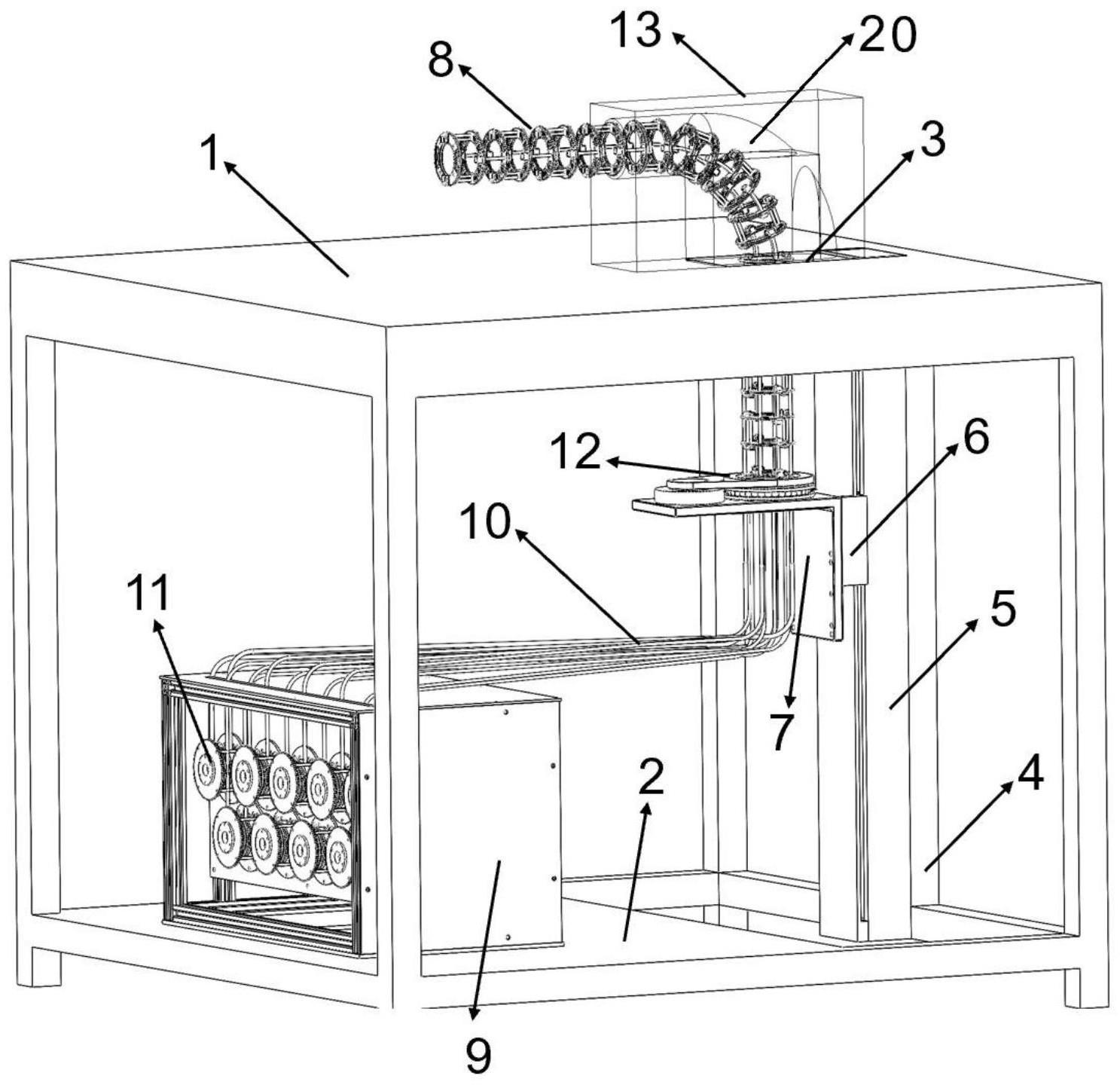
3、升降平台,所述升降平台分为两层,上层为升降连续型机器人的操作空间,并将连续型机器人的控制按钮安装在上层的平台上;下层为机器人的驱动箱固定安装层;以及
4、升降机构,所述升降机构固定在升降平台上,升降机构上安装有动滑块,动滑块用以安装带有旋转机构的连续机械臂;以及
5、连续机械臂,所述连续机械臂为已分离驱动部分的线驱动的连续机械臂;以及
6、驱动箱,所述驱动箱为从连续型机器人分离出的驱动电机部分,所述驱动电机部分包括多个驱动单元,所述驱动单元用于为所述连续机械臂和升降机构提供驱动,所述驱动单元利用穿过驱动线管的驱动线与连续机械臂连接;以及
7、旋转机构,所述旋转机构包括中空旋转轴承和传动组件,所述中空旋转轴承装配在所述动滑块上,所述连续机械臂安装在所述中空旋转轴承上,所述传动组件用于驱动所述中空旋转轴承带动所述连续机械臂旋转;以及
8、弯曲导向机构,所述弯曲导向机构用于通过外力结构改变所述连续机械臂在伸缩口的伸出方向,所述连续机械臂的一端位于升降平台的上下层之间,另一端穿过升降平台上层的开孔和弯曲导向机构后位于升降平台的上层。
9、优选地,所述升降机构包括安装架,所述安装架设置于所述升降平台的上下层之间,所述动滑块滑动装配在所述安装架上并可沿所述安装架上下移动或上下移动。
10、优选地,所述动滑块的一侧固定有滑块转接口,所述中空旋转轴承装配在所述滑块转接口上。
11、优选地,所述驱动单元包括驱动电机、绕线盘、驱动线管和驱动线,所述驱动线的一端缠绕在绕线盘上,所述驱动线的另一端穿过驱动线管与连续机械臂的运动单元固联;所述驱动电机用于带动绕线盘旋转并控制驱动线在绕线盘上的缠绕量,进而控制驱动线的有效长度实现对连续机械臂的远距离传动。
12、优选地,所述传动组件包括旋转电机和皮带,所述旋转电机通过皮带驱动所述中空旋转轴承转动。
13、优选地,所述弯曲导向机构采用弯曲导向筒。
14、优选地,所述驱动箱与连续臂之间通过驱动线和驱动线管连接,连续臂可根据需要安装在任意位置,并不局限于仅安装在升降平台的动滑块上。
15、本发明相对于现有技术取得了以下有益技术效果:
16、本发明中的驱动箱分离的可升降连续型机器人,包括升降平台、升降机构、连续机械臂、驱动箱、旋转机构和弯曲导向机构,实现驱动电机箱与连续臂进行分离,减小连续型机器人臂体部分的体积,提高连续型机器人的环境适应性,便于将连续型机器人安装在要求较高的环境中;还能够实现连续型机器人的可升降操作,该升降功能可为连续型机器人增加一个进给自由度,以此增加连续型机器人的操作自由度,增大有效操作空间;同时,为连续臂增加一个轴向的旋转自由度,提升连续型机器人的可操控性;另外还为连续型机器人增加一个弯屈导向机构,以此调整连续臂升降机构的进给方向,进而可调整连续臂的工作空间范围。
技术特征:
1.一种驱动箱分离的可升降连续型机器人,其特征在于:包括
2.根据权利要求1所述的驱动箱分离的可升降连续型机器人,其特征在于:所述升降机构包括安装架,所述安装架设置于所述升降平台的上下层之间,所述动滑块滑动装配在所述安装架上并可沿所述安装架上下移动或左右移动。
3.根据权利要求1所述的驱动箱分离的可升降连续型机器人,其特征在于:所述动滑块的一侧固定有滑块转接口,所述中空旋转轴承装配在所述滑块转接口上。
4.根据权利要求1所述的驱动箱分离的可升降连续型机器人,其特征在于:所述驱动单元包括驱动电机、绕线盘、驱动线管和驱动线,所述驱动线的一端缠绕在绕线盘上,所述驱动线的另一端穿过驱动线管与连续机械臂的运动单元固联;所述驱动电机用于带动绕线盘旋转并控制驱动线在绕线盘上的缠绕量,进而控制驱动线的有效长度实现对连续机械臂的远距离传动。
5.根据权利要求1所述的驱动箱分离的可升降连续型机器人,其特征在于:所述传动组件包括旋转电机和皮带,所述旋转电机通过皮带驱动所述中空旋转轴承转动。
6.根据权利要求1所述的驱动箱分离的可升降连续型机器人,其特征在于:所述弯曲导向机构采用弯曲导向筒。
技术总结
本发明公开一种驱动箱分离的可升降连续型机器人,包括升降平台、升降机构、连续机械臂、驱动箱、旋转机构和弯曲导向机构,实现驱动电机箱与连续臂进行分离,减小连续型机器人臂体部分的体积,提高连续型机器人的环境适应性,便于将连续型机器人安装在要求较高的环境中;还能够实现连续型机器人的可升降操作,该升降功能可为连续型机器人增加一个进给自由度,以此增加连续型机器人的操作自由度,增大有效操作空间;同时,为连续臂增加一个轴向的旋转自由度,提升连续型机器人的可操控性;另外还为连续型机器人增加一个弯屈导向机构,以此调整连续臂升降机构的进给方向,进而可调整连续臂的工作空间范围。
技术研发人员:康荣杰,袁培康,柴宗君,孙长超,张旭
受保护的技术使用者:天津大学
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!