一种基于ABB机器人的自动识别搬运钢铁试样的方法与流程
本发明涉及机器人,特别是涉及一种基于abb机器人的自动识别搬运钢铁试样的方法。
背景技术:
1、在我国机器人市场分布中,有很多的应用场景还没有实现柔性化,工业机器人的能力与期望差距较大,故需要加强人和机器人之间的合作,将传统的固有的自动化流程,升级为可交互的,可灵活识别复杂物体,以可控制的方式,应用于流水线生产中,以进一步加强柔性输送。
2、由于在工业机器人的运用当中,机器人大多是按照既定的作业程序进行操作,物体的初始及终止姿态也是之前就固有的,而操作精度取决于生产的定位精度。在高质量固定生产线与柔性生产下降、成本增加,两者之间的矛盾凸显,所以需要寻求一个相对平衡的解决办法。
技术实现思路
1、本发明所要解决的技术问题是,克服现有技术的缺点,提供一种基于abb机器人的自动识别搬运钢铁试样的方法。
2、为了解决以上技术问题,本发明的技术方案如下:
3、一种基于abb机器人的自动识别搬运钢铁试样的方法,包括:
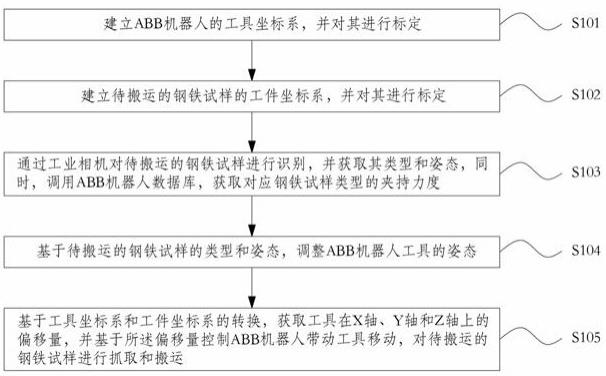
4、建立abb机器人的工具坐标系,并对其进行标定;
5、建立待搬运的钢铁试样的工件坐标系,并对其进行标定;
6、通过工业相机对待搬运的钢铁试样进行识别,并获取其类型和姿态;
7、基于待搬运的钢铁试样的类型和姿态,调整abb机器人工具的姿态;
8、基于工具坐标系和工件坐标系的转换,获取工具在x轴、y轴和z轴上的偏移量,并基于所述偏移量控制abb机器人带动工具移动,对待搬运的钢铁试样进行抓取和搬运。
9、作为本发明所述基于abb机器人的自动识别搬运钢铁试样的方法的一种优选方案,其中:所述建立abb机器人的工具坐标系,并对其进行标定包括:
10、以工具中心点作为工具坐标系的原点,建立工具坐标系;
11、在大地坐标系上确定一个测试基准点,并给定四个测试点;
12、控制abb机器人使工具移动至第一个测试点,且使工具中心店对准测试基准点,并记录abb机器人的坐标;
13、控制abb机器人使工具移动至第二个测试点,且使工具中心店对准测试基准点,并记录abb机器人的坐标;
14、控制abb机器人使工具移动至第三个测试点,且使工具中心店对准测试基准点,并记录abb机器人的坐标;
15、控制abb机器人使工具移动至第四个测试点,且使工具中心店对准测试基准点,并记录abb机器人的坐标;
16、基于四个测试点的坐标,自动生成工具坐标系的参数。
17、作为本发明所述基于abb机器人的自动识别搬运钢铁试样的方法的一种优选方案,其中:所述建立待搬运的钢铁试样的工件坐标系,并对其进行标定包括:
18、设定任意角度的x轴、y轴、z轴,且使坐标原点位于待搬运的钢铁试样上,形成工件坐标系;
19、确定工件坐标系的原点为x1点;
20、确定位于工件坐标系x轴正方向上的x2点;
21、确定工件坐标系y轴正方向上的y1点。
22、作为本发明所述基于abb机器人的自动识别搬运钢铁试样的方法的一种优选方案,其中:标定后的工件坐标系满足右手原则。
23、作为本发明所述基于abb机器人的自动识别搬运钢铁试样的方法的一种优选方案,其中:在所述基于待搬运的钢铁试样的类型和姿态,调整abb机器人工具的姿态之后,还包括:
24、调用abb机器人数据库,获取对应钢铁试样类型的夹持力度。
25、本发明的有益效果是:
26、(1)本发明通过工业相机识别待搬运的钢铁试样的类型和姿态,然后根据钢铁试样的类型和姿态调整abb机器人末端工具的姿态和参数,从而可灵活应对任何类型的钢铁试样。
27、(2)本发明通过建立工具坐标系和工件坐标系,并进行标定,使机器人末端工具可精确移动至目标位置,对钢铁试样进行夹取,保证了机器人的操作精度。
技术特征:
1.一种基于abb机器人的自动识别搬运钢铁试样的方法,其特征在于:包括:
2.根据权利要求1所述的基于abb机器人的自动识别搬运钢铁试样的方法,其特征在于:所述建立abb机器人的工具坐标系,并对其进行标定包括:
3.根据权利要求1所述的基于abb机器人的自动识别搬运钢铁试样的方法,其特征在于:所述建立待搬运的钢铁试样的工件坐标系,并对其进行标定包括:
4.根据权利要求3所述的基于abb机器人的自动识别搬运钢铁试样的方法,其特征在于:标定后的工件坐标系满足右手原则。
5.根据权利要求1所述的基于abb机器人的自动识别搬运钢铁试样的方法,其特征在于:在所述基于待搬运的钢铁试样的类型和姿态,调整abb机器人工具的姿态之后,还包括:
技术总结
本发明公开了一种基于ABB机器人的自动识别搬运钢铁试样的方法,涉及机器人技术领域,包括:建立ABB机器人的工具坐标系,并对其进行标定;建立钢铁试样的工件坐标系,并对其进行标定;通过工业相机对钢铁试样进行识别,并获取其类型和姿态;基于钢铁试样的类型和姿态,调整ABB机器人工具的姿态;基于工具坐标系和工件坐标系的转换,获取工具在X轴、Y轴和Z轴上的偏移量,并基于所述偏移量控制ABB机器人带动工具移动,对待搬运的钢铁试样进行抓取和搬运。本发明通过工业相机识别待搬运的钢铁试样的类型和姿态,然后根据钢铁试样的类型和姿态调整ABB机器人末端工具的姿态和参数,从而可灵活应对任何类型的钢铁试样。
技术研发人员:李凌飞,汪五一,嵇立磊
受保护的技术使用者:南京钢铁股份有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!