一种康养艾灸机器人回旋灸动态轨迹规划方法及系统与流程
本发明涉及动态轨迹规划,具体为一种康养艾灸机器人回旋灸动态轨迹规划方法及系统。
背景技术:
1、艾灸是中医治疗的一种方式,使用艾条或艾柱,产生艾热刺激人体穴位或特定部位,强化局部血液和淋巴循环,提升代谢,调节经络、增强免疫。使用机器人进行艾灸是现在的一种趋势,它具有操作简单和手法专业稳定等优点,艾灸通用的手法为雀啄灸和回旋灸两种,但是市场上现有的艾灸机器人其艾灸轨迹基本上是定点不动的去艾灸,少数加上机械臂艾灸其回旋灸的轨迹只有单纯的绕圆艾灸,然而中医理疗中回旋灸的正确手法采用的是螺旋上升艾灸,同时随着艾灸柱的燃烧,需要根据艾灸柱的长度动态调整艾灸机器人的轨迹,这些是现有技术没有考虑的,而且对艾灸理疗影响很大的不足之处。
技术实现思路
1、本部分的目的在于概述本发明的实施例的一些方面以及简要介绍一些较佳实施例。在本部分以及本申请的说明书摘要和发明名称中可能会做些简化或省略以避免使本部分、说明书摘要和发明名称的目的模糊,而这种简化或省略不能用于限制本发明的范围。
2、鉴于上述存在的问题,提出了本发明。
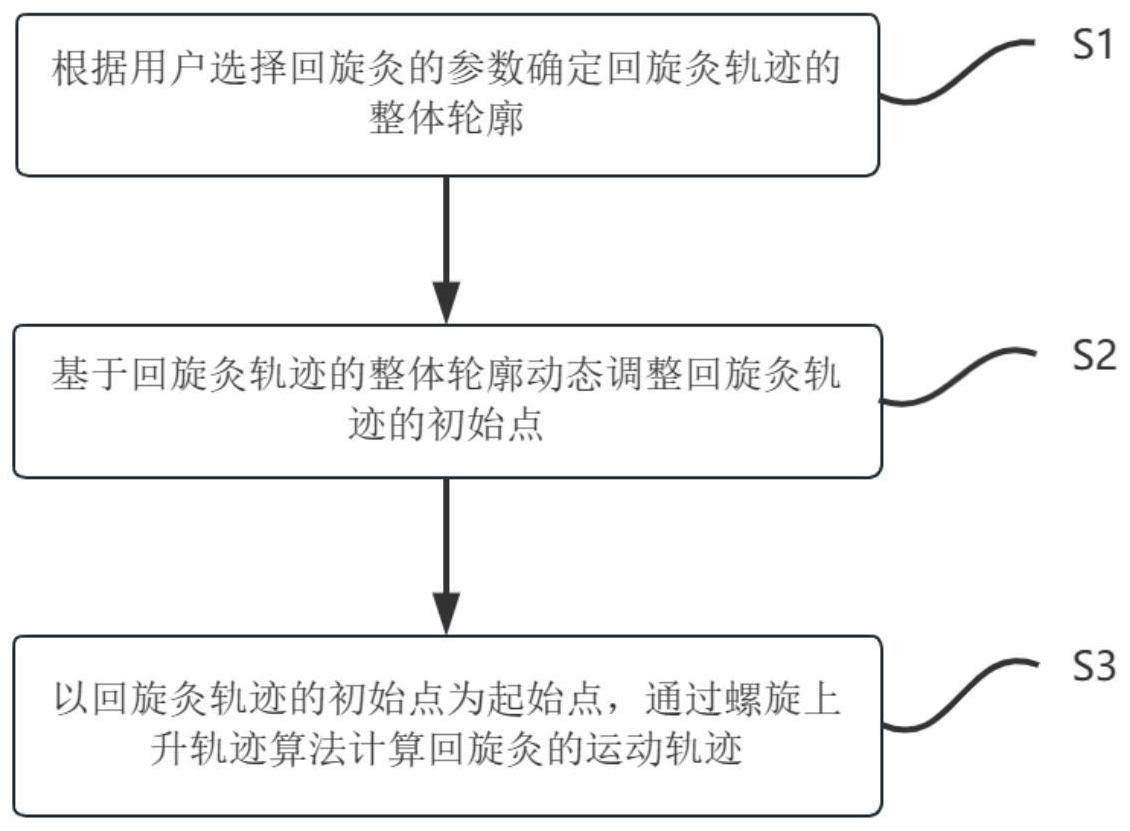
3、本发明实施例的第一方面,提供一种康养艾灸机器人回旋灸动态轨迹规划方法,包括:根据用户选择回旋灸的参数确定回旋灸轨迹的整体轮廓;基于所述回旋灸轨迹的整体轮廓动态调整回旋灸轨迹的初始点;以所述回旋灸轨迹的初始点为起始点,通过螺旋上升轨迹算法计算回旋灸的运动轨迹。
4、作为本发明所述的康养艾灸机器人回旋灸动态轨迹规划方法的一种优选方案,其中:所述回旋灸的参数包括回旋灸的高度z_max、螺旋增长率b、最大半径r以及最大旋转角度α_max。
5、作为本发明所述的康养艾灸机器人回旋灸动态轨迹规划方法的一种优选方案,其中:所述整体轮廓的确定包括,
6、根据用户选择回旋灸的参数确定回旋灸轨迹的整体轮廓;
7、利用所述回旋灸的高度z_max确定艾灸柱整体的最大移动高度,通过所述螺旋增长率b确定相邻两个艾灸点的变化幅度;
8、所述最大半径r用于确认艾灸初始点的半径大小,后续螺旋上升过程中艾灸初始点的半径依次减小,所述最大旋转角度α_max用于限定螺旋转圈的圈数。
9、作为本发明所述的康养艾灸机器人回旋灸动态轨迹规划方法的一种优选方案,其中:回旋灸轨迹的初始点在z轴上位置的动态调整包括,
10、在艾灸燃烧过程中需动态计算每一次轨迹的初始点位置p,则回旋灸轨迹的初始点在z轴上的迭代函数的计算包括,
11、
12、其中,和表示当前要求轨迹的初始点和上一个轨迹的初始点的z轴值,v表示艾灸柱燃烧的速率,t表示每轮回旋灸所需的时间。
13、作为本发明所述的康养艾灸机器人回旋灸动态轨迹规划方法的一种优选方案,其中:回旋灸轨迹的初始点在x轴和y轴上位置的动态调整包括,
14、为了避免每轮回旋灸的艾灸末端在同一个初始点导致用户感到不适,需将起始位置的x轴和y轴坐标同样进行动态调整,则回旋灸轨迹的初始点在x轴和y轴上的迭代函数的计算包括,
15、
16、
17、其中,和表示当前要求轨迹的初始点和上一个轨迹的初始点的x轴值,和表示当前要求轨迹的初始点和上一个轨迹的初始点的y轴值,θ表示每次迭代时起始点转动的角度。
18、作为本发明所述的康养艾灸机器人回旋灸动态轨迹规划方法的一种优选方案,其中:所述回旋灸的运动轨迹的计算包括,
19、在获取每轮回旋灸轨迹的初始点后,以所述回旋灸轨迹的初始点为螺旋上升的起始点,并通过螺旋上升轨迹算法计算回旋灸螺旋上升的运动轨迹;
20、所述螺旋上升轨迹算法的计算包括,
21、
22、其中,r表示极坐标系下的半径,α表示每轮回旋灸旋转的角度,x表示x轴上的值,y表示y轴上的值。
23、作为本发明所述的康养艾灸机器人回旋灸动态轨迹规划方法的一种优选方案,其中:还包括,
24、当所述回旋灸的运动轨迹在z轴上抬的高度为最大高度z_max或每轮回旋灸旋转的角度α到达最大的旋转角度α_max时,结束此轮的回旋灸,回到下一轮回旋灸轨迹的初始点并重新开始下一轮回旋灸。
25、本发明实施例的第二方面,提供一种康养艾灸机器人回旋灸动态轨迹规划系统,包括:
26、路径区域获取单元,用于根据用户选择回旋灸的参数确定回旋灸轨迹的整体轮廓;
27、初始点位获取单元,用于基于所述回旋灸轨迹的整体轮廓动态调整回旋灸轨迹的初始点;
28、运动轨迹计算单元,用于以所述回旋灸轨迹的初始点为起始点,通过螺旋上升轨迹算法计算回旋灸的运动轨迹。
29、本发明实施例的第三方面,提供一种设备,所述设备包括,
30、处理器;
31、用于存储处理器可执行指令的存储器;
32、所述处理器被配置为调用所述存储器存储的指令,以执行本发明任一实施例所述的方法。
33、本发明实施例的第四方面,提供一种计算机可读存储介质,其上存储有计算机程序指令,包括:
34、所述计算机程序指令被处理器执行时实现如本发明任一实施例所述的方法。
35、本发明的有益效果:本发明提供一种康养艾灸机器人回旋灸动态轨迹规划方法及系统,相比于现在已有的机器人回旋灸方式而言,回旋灸的轨迹更符合标准医师的手法,能够更加提高身体艾灸的效果;同时,动态调整轨迹初始点可以使得艾灸再燃烧过程中始终距离人体恒定距离开始艾灸,不至于艾灸末端离人体太远而导致后面的艾灸效果不加,不采用同一个(x,y)面的点作为起始点,可以很好的降低对皮肤单点的烫伤,同时对病灶处一圈都能起到很好的艾灸效果。
技术特征:
1.一种康养艾灸机器人回旋灸动态轨迹规划方法,其特征在于,包括:
2.如权利要求1所述的康养艾灸机器人回旋灸动态轨迹规划方法,其特征在于:所述回旋灸的参数包括回旋灸的高度z_max、螺旋增长率b、最大半径r以及最大旋转角度α_max。
3.如权利要求2所述的康养艾灸机器人回旋灸动态轨迹规划方法,其特征在于:所述整体轮廓的确定包括,
4.如权利要求3所述的康养艾灸机器人回旋灸动态轨迹规划方法,其特征在于:回旋灸轨迹的初始点在z轴上位置的动态调整包括,
5.如权利要求4所述的康养艾灸机器人回旋灸动态轨迹规划方法,其特征在于:回旋灸轨迹的初始点在x轴和y轴上位置的动态调整包括,
6.如权利要求5所述的康养艾灸机器人回旋灸动态轨迹规划方法,其特征在于:所述回旋灸的运动轨迹的计算包括,
7.如权利要求6所述的康养艾灸机器人回旋灸动态轨迹规划方法,其特征在于:还包括,
8.一种康养艾灸机器人回旋灸动态轨迹规划系统,其特征在于,包括:
9.一种设备,其特征在于,所述设备包括,
10.一种计算机可读存储介质,其上存储有计算机程序指令,其特征在于,所述计算机程序指令被处理器执行时实现权利要求1~7中任一所述的方法。
技术总结
本发明公开了一种康养艾灸机器人回旋灸动态轨迹规划方法及系统包括:根据用户选择回旋灸的参数确定回旋灸轨迹的整体轮廓;基于回旋灸轨迹的整体轮廓动态调整回旋灸轨迹的初始点;以回旋灸轨迹的初始点为起始点,通过螺旋上升轨迹算法计算回旋灸的运动轨迹;本发明提供的方法通过动态调整轨迹初始点可以使得艾灸在燃烧过程中始终距离人体恒定距离开始艾灸,降低对皮肤单点的烫伤,回旋灸的轨迹更符合标准医师的手法,能够更加提高身体艾灸的效果。
技术研发人员:丁瑞臣,夏炎,骆敏舟
受保护的技术使用者:江苏集萃智能制造技术研究所有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!