一种基于数字孪生工业机器人的制造单元创新平台搭建方法
本发明涉及工业机器人制造,具体的,涉及一种基于数字孪生工业机器人的制造单元创新平台搭建方法。
背景技术:
1、数字孪生技术作为一种将数字化技术与实体经济深度融合的新型技术,正在被越来越多的企业所采用。在工业机器人制造领域,数字孪生技术可以帮助企业实现对机器人制造过程的全面仿真和优化,提高制造效率和质量,降低成本,并提供可视化的工艺流程和资源调度,实现更高效的生产线管理。
2、在现有技术中,工业机器人制造单元的搭建存在着很多问题,如效率低下、成本高昂、质量不稳定等。为了解决这些问题,需要对机器人制造单元的搭建过程进行全面的仿真和优化。然而,传统的仿真方法往往难以在实际应用中得到有效的应用,并且无法实现可视化的工艺流程和资源调度,难以满足实际生产需求。
3、因此,提供一种基于数字孪生工业机器人的制造单元创新平台搭建方法,解决上述问题。
技术实现思路
1、本发明提出一种基于数字孪生工业机器人的制造单元创新平台搭建方法,解决上述问题。
2、本发明的技术方案如下:包括以下步骤:
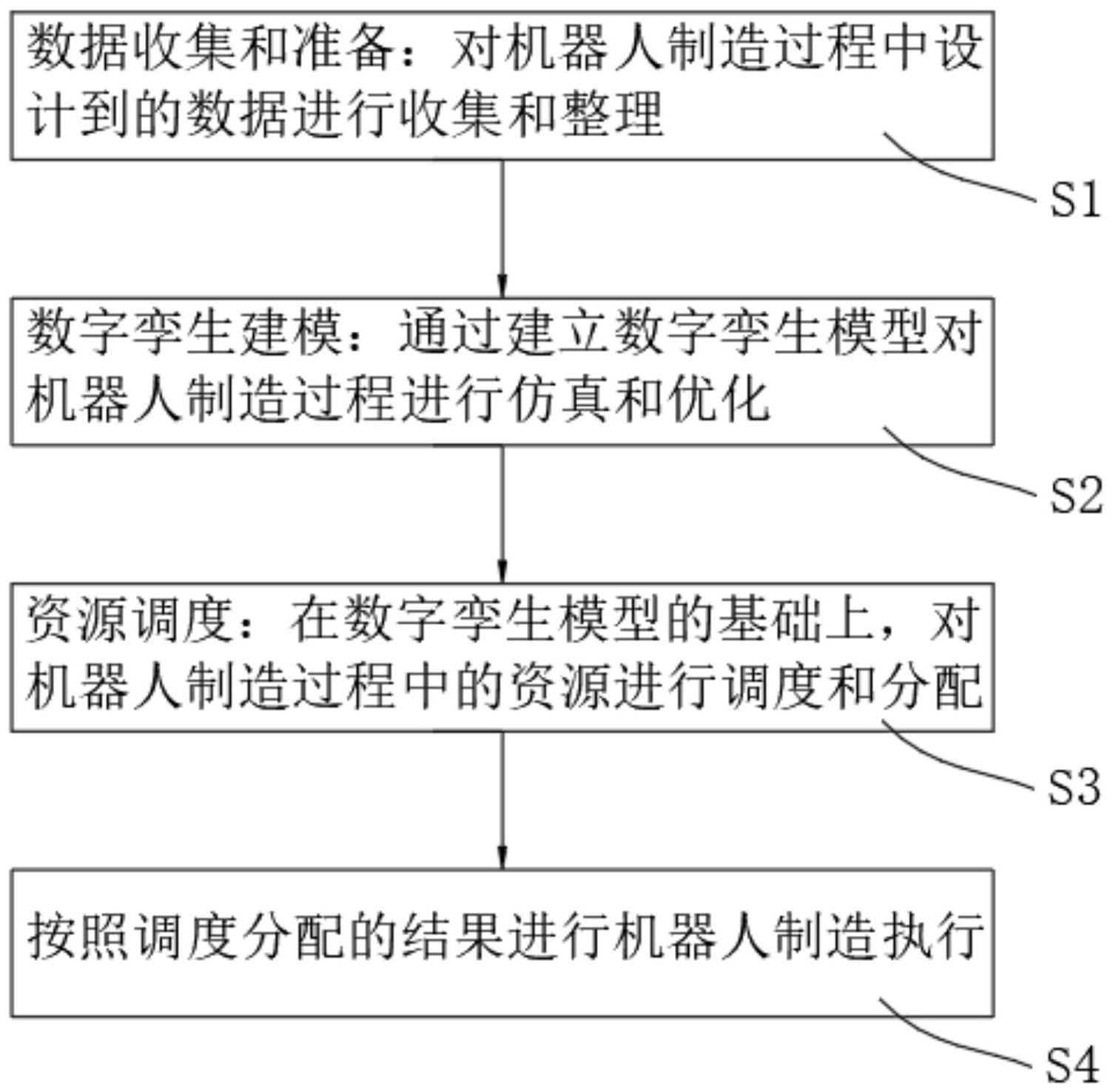
3、步骤s1:数据收集和准备:对机器人制造过程中涉及到的数据进行收集和整理;
4、步骤s2:数字孪生建模:通过建立数字孪生模型对机器人制造过程进行仿真和优化;
5、步骤s3:资源调度:在数字孪生模型的基础上,对机器人制造过程中的资源进行调度和分配;
6、步骤s4:按照调度分配的结果进行机器人制造执行。
7、作为本发明的一种优选技术方案,所述步骤s1中的数据包括:
8、a、机器人3d模型数据。
9、b、机器人运动数据,包括关节运动、移动路径、姿态变化,以便进行虚拟仿真和可视化展示。
10、c、机器人传感器数据,包括视觉传感器、激光雷达、惯性传感器,以便进行环境感知和自主决策。
11、d、机器人控制系统数据,包括控制算法、通信协议、io信号,以便进行虚拟仿真和可视化展示。
12、e、机器人制造工艺数据,包括零部件清单、制造流程、工艺参数,以便进行虚拟制造和维护管理。
13、f、机器人运行状态数据,包括任务执行情况、故障记录、维护记录,以便进行远程监控和故障预测。
14、作为本发明的一种优选技术方案,所述步骤s2中数字孪生建模包括:
15、工业机器人模型:用于工件的搬运;
16、立体仓储模块:用于放置模具,高度与模具适配,存储和使用更方便;
17、井式供料模块:用于将物料送往传送带;
18、皮带输送模块:进行物料的运输;
19、视觉检测模块:采用光电子技术将光学讯号转化为电讯号,用以侦测被测物体;
20、数控加工中心模块:通过cnc设备进行工件的加工;
21、变位机模块:用于旋转工件的变形,以达到最佳的工艺定位及焊接速率。
22、作为本发明的一种优选技术方案,所述步骤s3中的资源调度和分配的策略包括:
23、设备调度、材料调度、生产调度以及协同作业。
24、作为本发明的一种优选技术方案,所述步骤s4中所述的机器人制造执行步骤包括:
25、①:启动系统;
26、②:工业机器人就位;
27、③:机器人运动拾取工业制造夹具;
28、④:抓取工件;
29、⑤:零件置入加工单元自动运行cnc开始加工;
30、⑥:取出零件对零件进行打磨处理;
31、⑦:机器人将加工完成的工件取出并放入立体仓库模块。
32、本发明的有益效果为:
33、(1)通过工业机器人制造单元创新平台的搭建方法,能够对机器人制造过程进行全面的仿真和优化,提高制造效率和质量,降低成本,并提供可视化的工艺流程和资源调度,实现更高效的生产线管理。
34、(2)全面仿真和优化:本发明能够对机器人制造过程进行全面的仿真和优化,使得制造过程更加精确和可控。
35、(3)可视化呈现:本发明能够将仿真结果以可视化形式呈现,方便操作人员直观地了解整个制造过程。
36、(4)实际应用价值:本发明方法可以广泛应用于多种类型的机器人职早安,具有较高的应用价值。
技术特征:
1.一种基于数字孪生工业机器人的制造单元创新平台搭建方法,其特征在于:包括以下步骤:
2.根据权利要求1所述的一种基于数字孪生工业机器人的制造单元创新平台搭建方法,其特征在于,所述步骤s1中的数据包括:
3.根据权利要求1所述的一种基于数字孪生工业机器人的制造单元创新平台搭建方法,其特征在于,所述步骤s2中数字孪生建模包括:
4.根据权利要求3所述的一种基于数字孪生工业机器人的制造单元创新平台搭建方法,其特征在于,所述步骤s3中的资源调度和分配的策略包括:
5.根据权利要求1所述的一种基于数字孪生工业机器人的制造单元创新平台搭建方法,其特征在于,所述步骤s4中所述的机器人制造执行步骤包括:
技术总结
本发明涉及工业机器人制造技术领域,提出了一种基于数字孪生工业机器人的制造单元创新平台搭建方法,包括以下步骤:步骤S1:数据收集和准备:对机器人制造过程中设计到的数据进行收集和整理;步骤S2:数字孪生建模:通过建立数字孪生模型对机器人制造过程进行仿真和优化;步骤S3:资源调度:在数字孪生模型的基础上,对机器人制造过程中的资源进行调度和分配;步骤S4:按照调度分配的结果进行机器人制造执行。本发明通过工业机器人制造单元创新平台的搭建方法,能够对机器人制造过程进行全面的仿真和优化,提高制造效率和质量,降低成本,并提供可视化的工艺流程和资源调度,实现更高效的生产线管理。
技术研发人员:肖新华,李辉燕,王永奉
受保护的技术使用者:湖北理工学院
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!