一种悬挂机器人的制作方法
本发明涉及机器人,具体是一种悬挂机器人。
背景技术:
1、在车间作业时,往往是借助机器人来搬运、转运产品,但是在一些场合中,地面的设备较多,没有更多的空间安装行走机器人,因此,目前倾向于将机器人安装于车间的天花板,使得整个机器人悬挂工作。
2、但是现在的悬挂机器人占用的空间很大,导致车间的下半空间被设备占用,上半空间被机器人占用,车间显得拥挤,且悬挂的机器人还会影响地面设备的工作。
技术实现思路
1、为解决上述现有技术的缺陷,本发明提供一种悬挂机器人,本发明将驱动部件内置,大大减少占用空间,采用悬挂的形式便于工作,效率高。
2、为实现上述技术目的,本发明采用如下技术方案:一种悬挂机器人,包括安装于天花板的长轴组件、连接于所述长轴组件的主旋转组件、连接于所述主旋转组件的升降组件、连接于所述升降组件的副旋转组件;
3、所述主旋转组件沿着所述长轴组件直线运动,所述升降组件的驱动端内置于所述主旋转组件中。
4、进一步地,所述长轴组件包括固定于天花板的导轨,所述导轨滑动设置有滑块,所述导轨的端部设置有长轴电机,所述长轴电机驱动有丝杆,所述丝杆设于所述导轨内且螺纹连接于所述滑块,所述滑块固定有连接板,所述连接板连接于所述主旋转组件,所述导轨设置有防护罩。
5、进一步地,所述主旋转组件包括固定于所述连接板的转接法兰,所述转接法兰的下端设置有旋转套筒且二者之间形成有间隙,所述转接法兰的下端口一侧固定有安装块,所述安装块安装有主旋转电机,所述主旋转电机驱动有主小齿轮,所述主小齿轮啮合有主大齿轮,所述主大齿轮的转轴固定连接于所述旋转套筒,以使得所述主旋转电机驱动所述旋转套筒旋转运动。
6、进一步地,所述旋转套筒的下端固定有过渡套筒,所述过渡套筒的一侧固定有转向套筒,所述升降组件的驱动端内置于所述过渡套筒和所述转向套筒中。
7、进一步地,所述升降组件包括升降电机、安装法兰、升降齿轮、升降齿条、升降板,所述升降电机安装于所述过渡套筒和所述转向套筒中,所述安装法兰固定在所述转向套筒的开口上,所述升降齿轮嵌入式安装于所述安装法兰的外端面,所述升降电机穿过所述安装法兰后驱动连接所述升降齿轮,所述升降齿条嵌入式安装于所述安装法兰的外端面,所述升降齿条啮合于所述升降齿轮,所述升降板固定于所述升降齿条,使得所述升降电机驱动所述升降板上下运动。
8、进一步地,所述副旋转组件包括固定于所述升降板的外壳、置于所述外壳内部的副旋转电机、驱动连接于所述副旋转电机的旋转连接头。
9、综上所述,本发明取得了以下技术效果:
10、本发明将主旋转组件的驱动设置在一侧,不超出主旋转组件的高度,使得主旋转组件的整体高度降低,占用空间小;
11、本发明将升降组件的驱动内置到主旋转组件中,使得整体长度小,占用空间小;
12、本发明将副旋转组件的驱动内置于自身,使得副旋转组件的整体高度降低,占用空间小;
13、本发明悬挂方式工作,不占用地面的空间,整体高度较小,利用多轴作业,使得作业范围更大,效率更高。
技术特征:
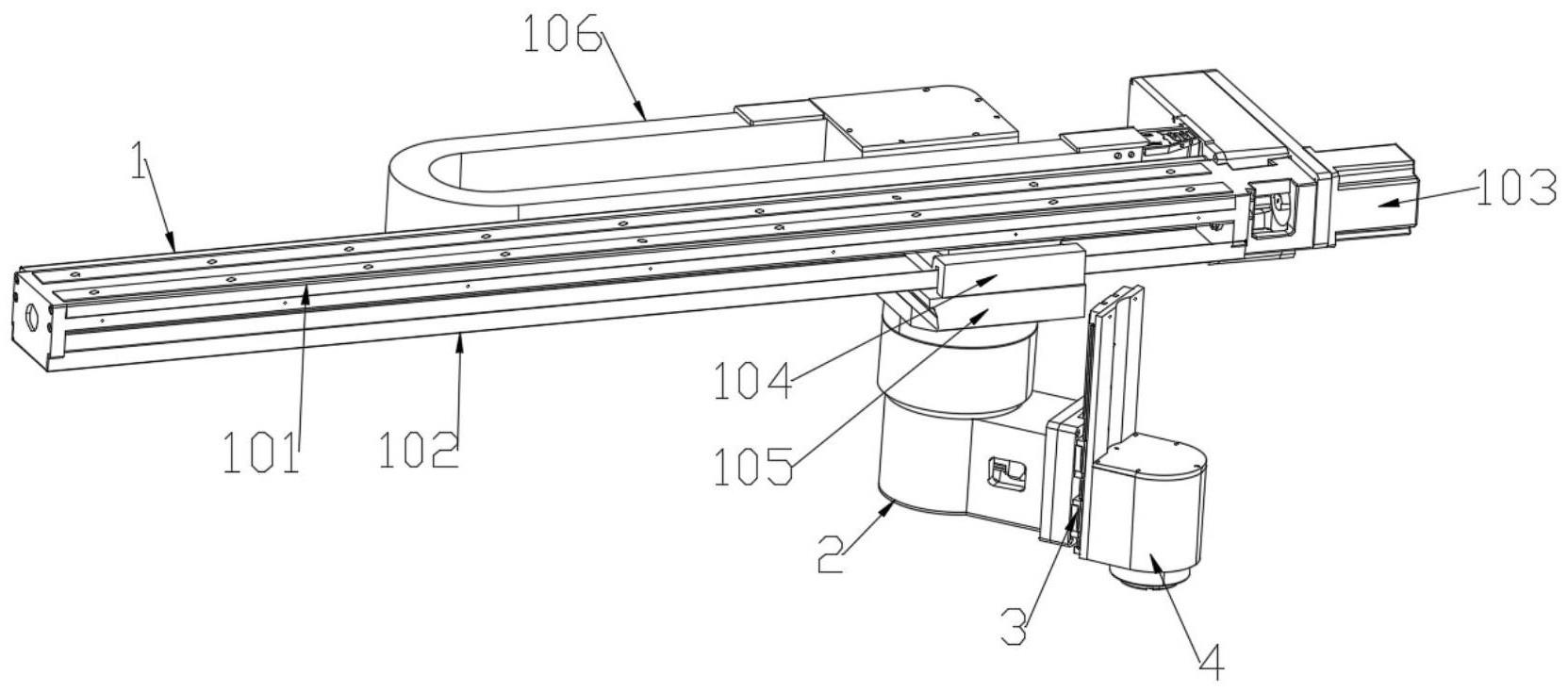
1.一种悬挂机器人,其特征在于:包括安装于天花板的长轴组件(1)、连接于所述长轴组件(1)的主旋转组件(2)、连接于所述主旋转组件(2)的升降组件(3)、连接于所述升降组件(3)的副旋转组件(4);
2.根据权利要求1所述的一种悬挂机器人,其特征在于:所述长轴组件(1)包括固定于天花板的导轨(101),所述导轨(101)滑动设置有滑块(104),所述导轨(101)的端部设置有长轴电机(103),所述长轴电机(103)驱动有丝杆,所述丝杆设于所述导轨(101)内且螺纹连接于所述滑块(104),所述滑块(104)固定有连接板(105),所述连接板(105)连接于所述主旋转组件(2),所述导轨(101)设置有防护罩(102)。
3.根据权利要求2所述的一种悬挂机器人,其特征在于:所述主旋转组件(2)包括固定于所述连接板(105)的转接法兰(201),所述转接法兰(201)的下端设置有旋转套筒(206)且二者之间形成有间隙,所述转接法兰(201)的下端口一侧固定有安装块(203),所述安装块(203)安装有主旋转电机(202),所述主旋转电机(202)驱动有主小齿轮(204),所述主小齿轮(204)啮合有主大齿轮(205),所述主大齿轮(205)的转轴固定连接于所述旋转套筒(206),以使得所述主旋转电机(202)驱动所述旋转套筒(206)旋转运动。
4.根据权利要求3所述的一种悬挂机器人,其特征在于:所述旋转套筒(206)的下端固定有过渡套筒(207),所述过渡套筒(207)的一侧固定有转向套筒(208),所述升降组件(3)的驱动端内置于所述过渡套筒(207)和所述转向套筒(208)中。
5.根据权利要求4所述的一种悬挂机器人,其特征在于:所述升降组件(3)包括升降电机(301)、安装法兰(302)、升降齿轮(303)、升降齿条(304)、升降板(305),所述升降电机(301)安装于所述过渡套筒(207)和所述转向套筒(208)中,所述安装法兰(302)固定在所述转向套筒(208)的开口上,所述升降齿轮(303)嵌入式安装于所述安装法兰(302)的外端面,所述升降电机(301)穿过所述安装法兰(302)后驱动连接所述升降齿轮(303),所述升降齿条(304)嵌入式安装于所述安装法兰(302)的外端面,所述升降齿条(304)啮合于所述升降齿轮(303),所述升降板(305)固定于所述升降齿条(304),使得所述升降电机(301)驱动所述升降板(305)上下运动。
6.根据权利要求5所述的一种悬挂机器人,其特征在于:所述副旋转组件(4)包括固定于所述升降板(305)的外壳(401)、置于所述外壳(401)内部的副旋转电机、驱动连接于所述副旋转电机的旋转连接头(402)。
技术总结
本发明公开了一种悬挂机器人,包括安装于天花板的长轴组件、连接于所述长轴组件的主旋转组件、连接于所述主旋转组件的升降组件、连接于所述升降组件的副旋转组件;所述主旋转组件沿着所述长轴组件直线运动,所述升降组件的驱动端内置于所述主旋转组件中。本发明将驱动部件内置,大大减少占用空间,采用悬挂的形式便于工作,效率高。
技术研发人员:崔正彬
受保护的技术使用者:普联斯迈智能装备(无锡)有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!