一种煤矿巡检机器人用导向装置的制作方法
本发明涉及矿用巡检机器人的,尤其涉及一种煤矿巡检机器人用导向装置。
背景技术:
1、随着我国煤炭行业的大力发展,对于可以在特殊状况下进行检测的机器人的需求增大。目前,煤矿井下作业环境,时常发生一些危险情况,例如五种常见的灾害,分别是矿井水灾、矿井火灾、矿井瓦斯伤害、矿井煤尘灾害、矿井顶板灾害等,在这些灾害情况下,考虑到工作人员的安全,以及降低工人的劳动强度,就需要机器人进行巡检检测。
2、煤矿巡检机器人主要以吊挂方式沿行走轨道巡检,行走轨道通常为架设在巷道顶部的h型钢或工字钢,巡检机器人通过行走轮吊挂在行走轨道上借助摩擦力进行矿山巷道的巡检工作。但是由于矿山巷道起伏多变,经常有上下坡道,转弯弯道,且轨道可能凹凸不平,而造成的巡检机器人在巡检时上下颠簸,转弯时左右晃动,影响正常的巡检。
技术实现思路
1、本部分的目的在于概述本发明的实施例的一些方面以及简要介绍一些较佳实施例。在本部分以及本申请的说明书摘要和发明名称中可能会做些简化或省略以避免使本部分、说明书摘要和发明名称的目的模糊,而这种简化或省略不能用于限制本发明的范围。
2、鉴于上述现有巡检机器人存在的问题,提出了本发明。
3、为解决上述技术问题,本发明提供如下技术方案:
4、一种煤矿巡检机器人用导向装置,包括:
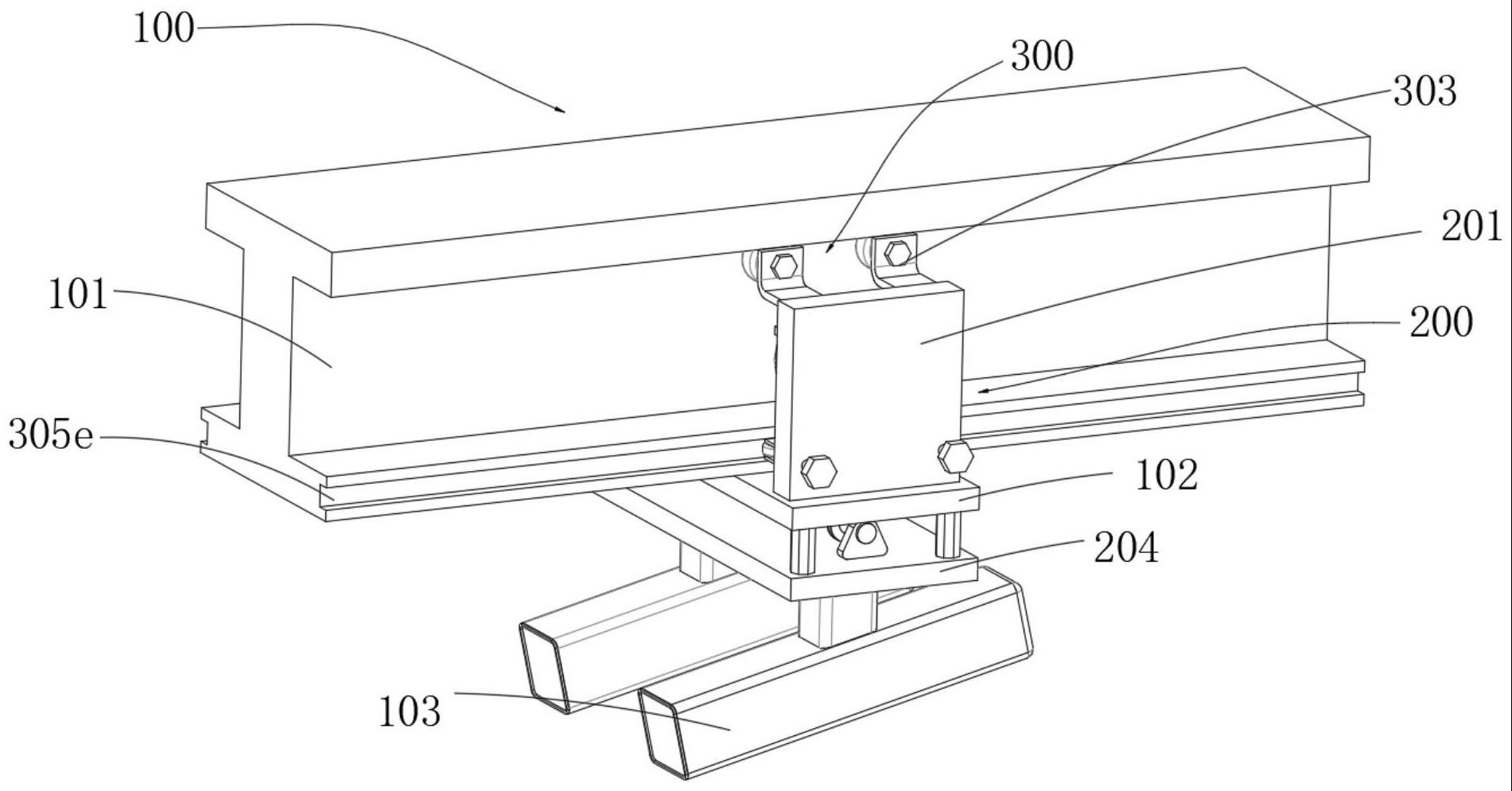
5、主体单元,包括导轨,所述导轨下方设有底座,所述底座下方设有多个巡检设备本体;
6、移动单元,包括多个侧板,所述侧板固定连接在底座上,所述侧板上转动连接有转动辊,所述转动辊上固定连接有滚轮,所述底座下方设有用于驱动滚轮的驱动组件,所述驱动组件与转动辊之间设有传动组件;
7、导向单元,包括多个固定板,所述固定板固定连接在侧板上,所述固定板上设有第一导向轮,所述第一导向轮与固定板之间设有连接组件,所述连接组件上设有减震组件,所述侧板上对称设有水平导向组件。
8、作为本发明所述一种煤矿巡检机器人用导向装置的一种优选方案,其中:所述驱动组件包括底板,所述底板设置在底座下方,所述底板与底座之间对称固定连接有多个立柱,所述巡检设备本体设置在底板上。
9、作为本发明所述一种煤矿巡检机器人用导向装置的一种优选方案,其中:所述底板还包括双轴电机,所述双轴电机设置在底板上,所述双轴电机输出端固定连接有转轴。
10、作为本发明所述一种煤矿巡检机器人用导向装置的一种优选方案,其中:所述传动组件包括主动传动轮,所述主动传动轮固定连接在转轴上,所述转动辊上固定连接有从动传动轮,所述底座上对称开设有矩形开口,所述主动传动轮与从动传动轮之间设有传动带,所述传动带穿过矩形开口。
11、作为本发明所述一种煤矿巡检机器人用导向装置的一种优选方案,其中:所述连接组件包括l型连接板,所述l型连接板滑动连接在侧板上,所述固定板上固定穿插有中空杆,所述中空杆上滑动穿插有滑动杆,所述滑动杆顶端固定连接在l型连接板上,所述l型连接板与固定板之间固定连接有第一弹簧,所述第一弹簧处于压缩状态。
12、作为本发明所述一种煤矿巡检机器人用导向装置的一种优选方案,其中:所述减震组件包括两个连接管,所述连接管固定连接在中空杆上,所述滑动杆底端固定连接有第一密封活塞板,所述连接管内壁上滑动连接有第二密封活塞板,所述第一密封活塞板与第二密封活塞板之间填充有氮气;所述第二密封活塞板上固定连接有圆杆,所述圆杆远离第二密封活塞板一端固定连接有弧形板,所述弧形板上设有摩擦垫。
13、作为本发明所述一种煤矿巡检机器人用导向装置的一种优选方案,其中:所述减震组件还包括圆板,所述圆板固定连接在连接管内壁上,所述圆杆滑动穿插在圆板上,所述圆板与弧形板之间固定连接有第二弹簧。
14、作为本发明所述一种煤矿巡检机器人用导向装置的一种优选方案,其中:所述水平导向组件包括矩形块,所述侧板上对称开设有矩形槽,所述矩形块滑动连接在矩形槽内侧壁上,所述矩形块上转动设置有第二导向轮,所述侧板上螺纹穿插有螺纹杆,所述螺纹杆转动连接在矩形块上,导轨上对称设有滑槽,所述第二导向轮与滑槽相配合。
15、本发明的有益效果:
16、1、使用时,启动双轴电机,使得转轴转动,带动主动传动轮转动,通过传动带带动转动辊转动,使得滚轮转动,带动该装置在导轨上进行移动,操作简单方便。
17、2、在移动过程中,l型连接板在第一弹簧的作用下始终具有向上运动的趋势,使得第一导向轮与导轨内顶壁相抵,使得该装置在上下坡时始终保持稳定状态,同时当l型连接板发生晃动而向下移动时,可带动滑动杆向下运动,带动第一密封活塞板向下运动,挤压内部气体使得第二密封活塞板向内侧运动,带动圆杆向内运动,带动弧形板向内运动,挤压滑动杆,减缓滑动杆向下运动的趋势,达到减震效果,进一步提高了该装置的稳定性,避免上下颠簸,保证了巡检设备本体巡检时的稳定性。
18、3、使用者在使用前可转动螺纹杆,带动矩形块在矩形槽内进行移动,使得第二导向轮位于滑槽内,保证了该装置在弯道处的平稳运行,避免该装置在弯道处发生偏移,左右晃动,保证了巡检设备本体巡检时的稳定性。
技术特征:
1.一种煤矿巡检机器人用导向装置,其特征在于:包括:
2.根据权利要求1所述的一种煤矿巡检机器人用导向装置,其特征在于:所述驱动组件(204)包括底板(204a),所述底板(204a)设置在底座(102)下方,所述底板(204a)与底座(102)之间对称固定连接有多个立柱(204b),所述巡检设备本体(103)设置在底板(204a)上。
3.根据权利要求2所述的一种煤矿巡检机器人用导向装置,其特征在于:所述底板(204a)还包括双轴电机(204c),所述双轴电机(204c)设置在底板(204a)上,所述双轴电机(204c)输出端固定连接有转轴(204d)。
4.根据权利要求3所述的一种煤矿巡检机器人用导向装置,其特征在于:所述传动组件(205)包括主动传动轮(205a),所述主动传动轮(205a)固定连接在转轴(204d)上,所述转动辊(202)上固定连接有从动传动轮(205b),所述底座(102)上对称开设有矩形开口(205c),所述主动传动轮(205a)与从动传动轮(205b)之间设有传动带(205d),所述传动带(205d)穿过矩形开口(205c)。
5.根据权利要求4所述的一种煤矿巡检机器人用导向装置,其特征在于:所述连接组件(303)包括l型连接板(303a),所述l型连接板(303a)滑动连接在侧板(201)上,所述固定板(301)上固定穿插有中空杆(303b),所述中空杆(303b)上滑动穿插有滑动杆(303c),所述滑动杆(303c)顶端固定连接在l型连接板(303a)上,所述l型连接板(303a)与固定板(301)之间固定连接有第一弹簧(303d),所述第一弹簧(303d)处于压缩状态。
6.根据权利要求5所述的一种煤矿巡检机器人用导向装置,其特征在于:所述减震组件(304)包括两个连接管(304a),所述连接管(304a)固定连接在中空杆(303b)上,所述滑动杆(303c)底端固定连接有第一密封活塞板(304b),所述连接管(304a)内壁上滑动连接有第二密封活塞板(304c),所述第一密封活塞板(304b)与第二密封活塞板(304c)之间填充有氮气;所述第二密封活塞板(304c)上固定连接有圆杆(304d),所述圆杆(304d)远离第二密封活塞板(304c)一端固定连接有弧形板(304e),所述弧形板(304e)上设有摩擦垫(304h)。
7.根据权利要求6所述的一种煤矿巡检机器人用导向装置,其特征在于:所述减震组件(304)还包括圆板(304f),所述圆板(304f)固定连接在连接管(304a)内壁上,所述圆杆(304d)滑动穿插在圆板(304f)上,所述圆板(304f)与弧形板(304e)之间固定连接有第二弹簧(304g)。
8.根据权利要求7所述的一种煤矿巡检机器人用导向装置,其特征在于:所述水平导向组件(305)包括矩形块(305b),所述侧板(201)上对称开设有矩形槽(305a),所述矩形块(305b)滑动连接在矩形槽(305a)内侧壁上,所述矩形块(305b)上转动设置有第二导向轮(305c),所述侧板(201)上螺纹穿插有螺纹杆(305d),所述螺纹杆(305d)转动连接在矩形块(305b)上,导轨(101)上对称设有滑槽(305e),所述第二导向轮(305c)与滑槽(305e)相配合。
技术总结
本发明公开了一种煤矿巡检机器人用导向装置,包括:主体单元,包括导轨,所述导轨下方设有底座,所述底座下方设有多个巡检设备本体;移动单元,包括多个侧板,所述侧板上转动连接有转动辊,所述转动辊上固定连接有滚轮;导向单元,包括多个固定板,所述固定板上设有第一导向轮,所述第一导向轮与固定板之间设有连接组件,所述连接组件上设有减震组件。本发明通过L型连接板在第一弹簧的作用下始终具有向上运动的趋势,使得第一导向轮与导轨内顶壁相抵,使得该装置在上下坡时始终保持稳定状态,同时当L型连接板发生晃动而向下移动时,弧形板向内运动,达到减震效果,进一步提高了该装置的稳定性。
技术研发人员:鞠岑,凌建才,陈新杰,沈庆龙,叶家坤,李品帝,单余良,刘银凯
受保护的技术使用者:宁顺集团有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!