一种仿生变刚度柔性气动腰关节结构
本发明属于仿生结构,尤其涉及一种仿生变刚度柔性气动腰关节结构。
背景技术:
1、仿生四足机器人凭借其强大的适应性可以适用于各个领域,具有很好的应用前景。但是目前四足机器人大多不具备腰关节,尤其是柔性的腰关节,缺少腰部自由度使其只能完成特定的简单动作,无法应用于未知的复杂三维环境。部分机器人具有刚性腰关节,与生物的灵活腰关节相去甚远,适应性低,灵活度低,自由度少,结构复杂,并且缺乏变刚度的特性,使该类型机器人难以完成基本的原地转向,更难以满足完成复杂运动姿态对机体柔顺弯曲的要求,只能局限于辅助机器人完成简单动作。因此,设计一种具有多自由度的仿生柔性腰关节辅助四足机器人实现多种复杂运动姿态是本领域技术人员亟待解决的问题。
技术实现思路
1、有鉴于此,本发明提供一种仿生变刚度柔性气动腰关节结构,用于解决上述问题。
2、为了实现上述目的,本发明采用如下技术方案:
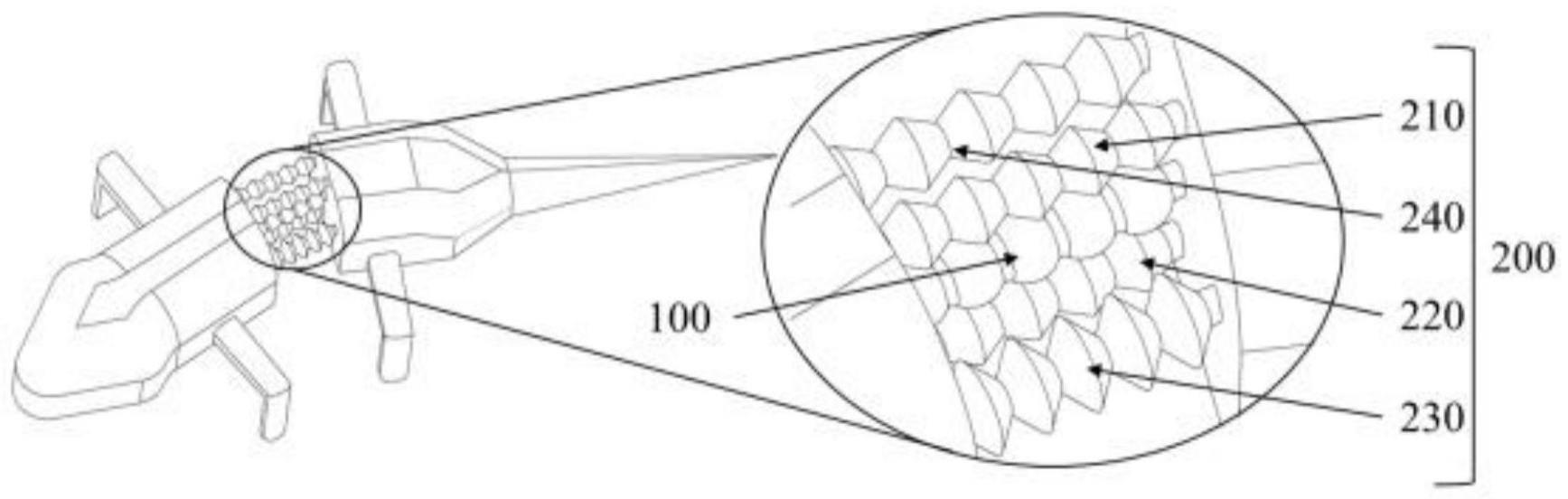
3、一种仿生变刚度柔性气动腰关节结构,用于连接四足机器人的上躯体和下躯体,包括:类脊柱结构、类腰肌结构和气压驱动装置,所述气压驱动装置安装在下躯体中,所述类腰肌结构包括类腰肌结构上、类腰肌结构下、类腰肌结构左和类腰肌结构右,所述类脊柱结构、所述类腰肌结构上、所述类腰肌结构下、所述类腰肌结构左和所述类腰肌结构右的两端均固定连接上躯体和下躯体,并均与所述气压驱动装置气路连通,所述类腰肌结构上、所述类腰肌结构下、所述类腰肌结构左和所述类腰肌结构右分别位于所述类脊柱结构的上方、下方、左侧和右侧。
4、进一步地,所述类脊柱结构包括顺应性万向球接头,多个所述顺应性万向球接头依次连接在上躯体和下躯体之间。
5、进一步地,所述类脊柱结构还包括柔性橡胶薄膜和第一尼龙颗粒,所述柔性橡胶薄膜包覆多个所述顺应性万向球接头并密封,并与所述气压驱动装置气路连通,多个所述第一尼龙颗粒填充在所述柔性橡胶薄膜和所述顺应性万向球接头之间。
6、进一步地,所述类腰肌结构上、所述类腰肌结构下、所述类腰肌结构左和所述类腰肌结构右的结构相同,均包括波纹管弹性外壁面和柔性柱塞结构,所述波纹管弹性外壁面的两端连接上躯体和下躯体,所述柔性柱塞结构嵌入安装在所述波纹管弹性外壁面中,与所述波纹管弹性外壁面根部进行固定并密封,所述波纹管弹性外壁面与所述气压驱动装置气路连通。
7、进一步地,所述类腰肌结构上、所述类腰肌结构下、所述类腰肌结构左和所述类腰肌结构右上还包括第二尼龙颗粒,多个所述第二尼龙颗粒填充在所述波纹管弹性外壁面和所述柔性柱塞结构之间。
8、进一步地,所述气压驱动装置包括气泵、三通电磁阀一、三通电磁阀二、三通电磁阀三、三通电磁阀四和三通电磁阀五,所述气泵安装在下躯体中,所述气泵分别与所述柔性橡胶薄膜,以及所述类腰肌结构上、所述类腰肌结构下、所述类腰肌结构左和所述类腰肌结构右中的所述波纹管弹性外壁面气路连通,所述三通电磁阀一安装在所述气泵与所述柔性橡胶薄膜的气路上,所述三通电磁阀二、所述三通电磁阀三、所述三通电磁阀四和所述三通电磁阀五分别安装在所述气泵与所述类腰肌结构上、所述类腰肌结构下、所述类腰肌结构左和所述类腰肌结构右中的所述波纹管弹性外壁面的气路上。
9、本发明的有益效果在于:
10、1.本发明由气压驱动装置控制类脊柱结构、类腰肌结构上、类腰肌结构下、类腰肌结构左和类腰肌结构右内常压与负压的切换,实现类脊柱结构周围的处于不同位置的类腰肌结构上、类腰肌结构下、类腰肌结构左和类腰肌结构右的收缩或伸长,来驱动实现类脊柱结构不同方向的弯曲,实现了四足仿生机器人的多自由度的结构变化,结构简单巧妙;
11、2.多个顺应性万向球接头连接四足机器人的上躯体和下躯体,正常大气压下,外层柔性橡胶薄膜处于松弛状态,第一尼龙颗粒与球接头之间摩擦力可以忽略不计,此时类脊柱结构处于低刚度状态,气压驱动装置对柔性橡胶薄膜施加负压,柔性橡胶薄膜收缩,第一尼龙颗粒相互挤压,产生较大的摩擦力,将多个顺应性万向球接头锁紧,此时类脊柱结构处于高刚度状态,使类脊柱结构固定于当前的弯曲角度;
12、3.在正常大气压下,类腰肌结构内部的柔性柱塞结构处于伸长状态,将波纹管弹性外壁面撑起,此时第二尼龙颗粒之间摩擦力忽略不计,类腰肌结构可以根据机器人的运动姿态进行弯曲、伸长或压缩,气压驱动装置对波纹管弹性外壁面施加负压,波纹管弹性外壁面被外界大气压压缩,柔性柱塞结构被压缩,内部体积变小,第二尼龙颗粒在大气压下相互挤压,产生较大的摩擦力,类腰肌结构缩短,并且刚度变大,类脊柱结构周围的处于不同位置的类腰肌结构上、类腰肌结构下、类腰肌结构左和类腰肌结构右的收缩或伸长实现了“腰关节”结构的全向弯曲,以及刚度与柔性的切换;
13、4.由一个气泵通过三通电磁阀一控制柔性橡胶薄膜内常压与负压的切换,以及通过三通电磁阀二、三通电磁阀三、三通电磁阀四和三通电磁阀五分别控制类腰肌结构上、类腰肌结构下、类腰肌结构左和类腰肌结构右内的波纹管弹性外壁面的常压与负压的切换,实现了类脊柱结构与各个类腰肌结构的自由度的改变,以及刚度与柔性的切换,控制需求简单,结构稳定可靠,状态响应快。
技术特征:
1.一种仿生变刚度柔性气动腰关节结构,用于连接四足机器人的上躯体和下躯体,其特征在于,包括:类脊柱结构、类腰肌结构和气压驱动装置,所述气压驱动装置安装在下躯体中,所述类腰肌结构包括类腰肌结构上、类腰肌结构下、类腰肌结构左和类腰肌结构右,所述类脊柱结构、所述类腰肌结构上、所述类腰肌结构下、所述类腰肌结构左和所述类腰肌结构右的两端均固定连接上躯体和下躯体,并均与所述气压驱动装置气路连通,所述类腰肌结构上、所述类腰肌结构下、所述类腰肌结构左和所述类腰肌结构右分别位于所述类脊柱结构的上方、下方、左侧和右侧。
2.根据权利要求1所述的一种仿生变刚度柔性气动腰关节结构,其特征在于,所述类脊柱结构包括顺应性万向球接头,多个所述顺应性万向球接头依次连接在上躯体和下躯体之间。
3.根据权利要求2所述的一种仿生变刚度柔性气动腰关节结构,其特征在于,所述类脊柱结构还包括柔性橡胶薄膜和第一尼龙颗粒,所述柔性橡胶薄膜包覆多个所述顺应性万向球接头并密封,并与所述气压驱动装置气路连通,多个所述第一尼龙颗粒填充在所述柔性橡胶薄膜和所述顺应性万向球接头之间。
4.根据权利要求3所述的一种仿生变刚度柔性气动腰关节结构,其特征在于,所述类腰肌结构上、所述类腰肌结构下、所述类腰肌结构左和所述类腰肌结构右的结构相同,均包括波纹管弹性外壁面和柔性柱塞结构,所述波纹管弹性外壁面的两端连接上躯体和下躯体,所述柔性柱塞结构嵌入安装在所述波纹管弹性外壁面中,与所述波纹管弹性外壁面根部进行固定并密封,所述波纹管弹性外壁面与所述气压驱动装置气路连通。
5.根据权利要求4所述的一种仿生变刚度柔性气动腰关节结构,其特征在于,所述类腰肌结构上、所述类腰肌结构下、所述类腰肌结构左和所述类腰肌结构右上还包括第二尼龙颗粒,多个所述第二尼龙颗粒填充在所述波纹管弹性外壁面和所述柔性柱塞结构之间。
6.根据权利要求4所述的一种仿生变刚度柔性气动腰关节结构,其特征在于,所述气压驱动装置包括气泵、三通电磁阀一、三通电磁阀二、三通电磁阀三、三通电磁阀四和三通电磁阀五,所述气泵安装在下躯体中,所述气泵分别与所述柔性橡胶薄膜,以及所述类腰肌结构上、所述类腰肌结构下、所述类腰肌结构左和所述类腰肌结构右中的所述波纹管弹性外壁面气路连通,所述三通电磁阀一安装在所述气泵与所述柔性橡胶薄膜的气路上,所述三通电磁阀二、所述三通电磁阀三、所述三通电磁阀四和所述三通电磁阀五分别安装在所述气泵与所述类腰肌结构上、所述类腰肌结构下、所述类腰肌结构左和所述类腰肌结构右中的所述波纹管弹性外壁面的气路上。
技术总结
本发明公开一种仿生变刚度柔性气动腰关节结构,属于仿生结构技术领域,包括:类脊柱结构、类腰肌结构和气压驱动装置,气压驱动装置安装在下躯体中,类腰肌结构包括类腰肌结构上、类腰肌结构下、类腰肌结构左和类腰肌结构右,类脊柱结构、类腰肌结构上、类腰肌结构下、类腰肌结构左和类腰肌结构右的两端均固定连接上躯体和下躯体,均与气压驱动装置气路连通,类腰肌结构上、类腰肌结构下、类腰肌结构左和类腰肌结构右分别位于类脊柱结构的上下左右。本发明使用单一气泵通过电磁阀控制常压与负压之间的切换实现不同位置的类腰肌机构的收缩和伸长,来驱动类脊柱结构实现不同的方向的弯曲,同时通过尼龙颗粒阻塞增加了结构的刚度。
技术研发人员:王周义,袁清松,翁志远,姚俊升,赵闻鑫,段云龙,张沛清
受保护的技术使用者:南京航空航天大学
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!