针对机器人的摄像机的校正方法、系统以及存储介质与流程
本发明涉及针对机器人的摄像机的校正方法、系统以及计算机程序。
背景技术:
1、在机器人的作业中使用摄像机的情况下,通过预先进行校正(校准)来设定摄像机的校正参数。校正参数包括表示透镜的性能或透镜与像素的关系的内部参数和表示摄像机与外部装置的相对位置的外部参数。摄像机的校准通常使用印刷或加工有点或棋盘等图案的专用的校准板来进行。这样的通常的校准处理需要专用的器材,其调整需要非常多的时间。另外,每当摄像机与机器人的位置关系变化时,都需要进行校准,成为降低机器人的使用便利性的1个主要原因。
2、为了消除这样的使用便利性的降低,在专利文献1中提出了在机械臂上粘贴臂标记,使机械臂上的已知的位置与臂标记对应的方法。
3、专利文献1:日本特开2017-124448号公报
4、但是,在上述现有技术中,需要在机械臂上粘贴标记,存在作业繁杂等问题。因此,期望一种无需在机械臂上粘贴标记就能够进行摄像机的校准的技术。
技术实现思路
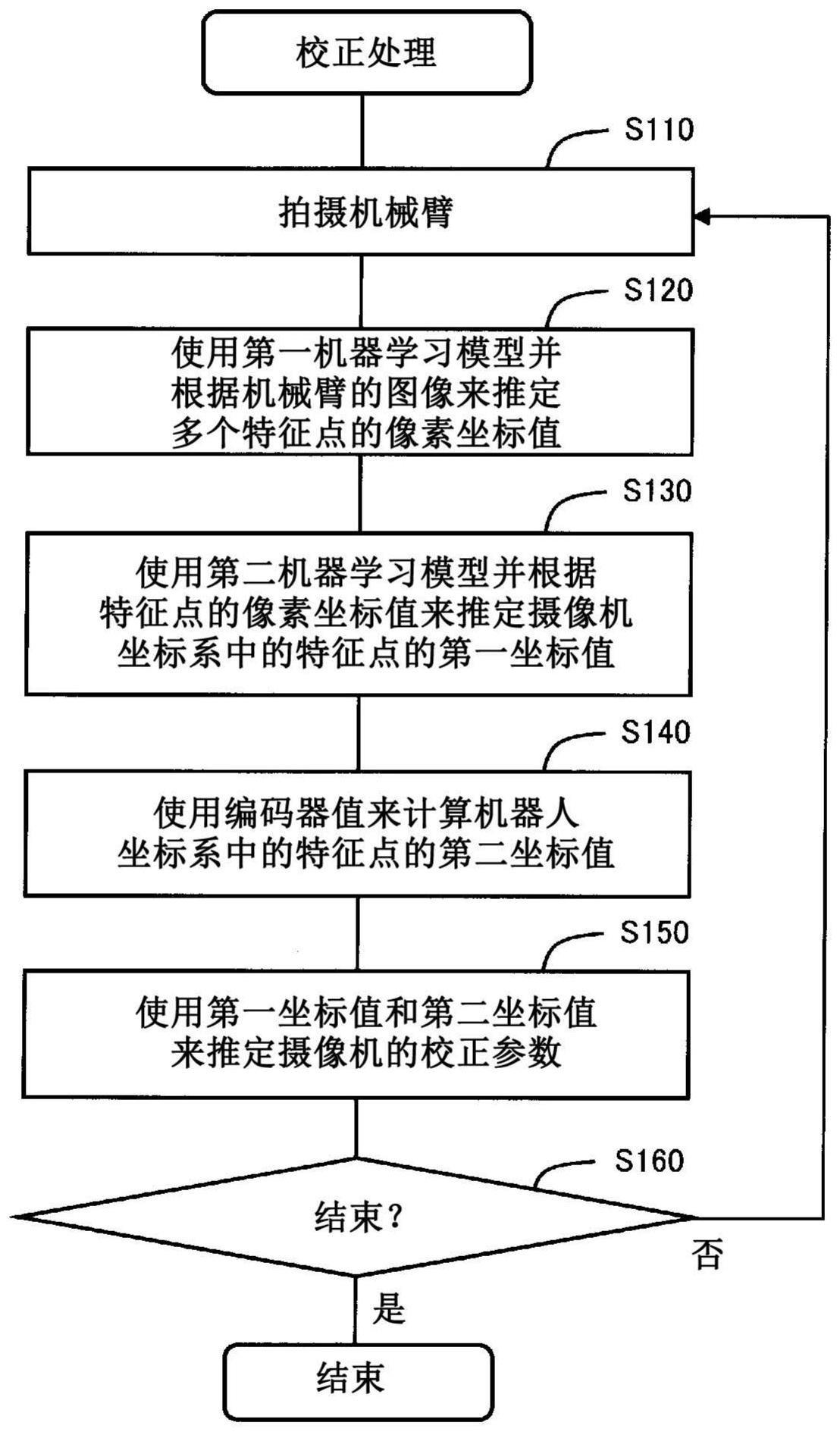
1、根据本发明的第一方式,提供针对机器人的摄像机的校正方法。该方法包括:(a)使用学习完毕的第一机器学习模型并根据由所述摄像机拍摄的机械臂的图像来推定在所述机械臂上预先设定的多个特征点的像素坐标值的工序;(b)使用学习完毕的第二机器学习模型并根据所述多个特征点的所述像素坐标值来推定三维摄像机坐标系上的所述多个特征点的第一坐标值的工序;(c)使用所述机械臂的编码器值来计算三维机器人坐标系中的所述多个特征点的第二坐标值的工序;以及(d)针对所述机械臂的多个姿态执行所述工序(a)~(c),使用所述多个姿态下的所述多个特征点的所述第一坐标值和所述第二坐标值来推定包含所述摄像机的外部参数的校正参数的工序。
2、根据本发明的第二方式,提供执行针对机器人的摄像机的校正处理的系统。该系统具备:摄像机,能够拍摄所述机器人的机械臂;以及校正处理部,使用由所述摄像机拍摄的图像来执行所述摄像机的校正处理。所述校正处理部执行:(a)使用学习完毕的第一机器学习模型并根据由所述摄像机拍摄的所述机械臂的图像来推定在所述机械臂上预先设定的多个特征点的像素坐标值的处理;(b)使用学习完毕的第二机器学习模型并根据所述多个特征点的所述像素坐标值来推定三维摄像机坐标系中的所述多个特征点的第一坐标值的处理;(c)使用所述机械臂的编码器值来计算三维机器人坐标系中的所述多个特征点的第二坐标值的处理;以及(d)针对所述机械臂的多个姿态执行所述处理(a)~(c),使用所述多个姿态下的所述多个特征点的所述第一坐标值和所述第二坐标值来推定包含所述摄像机的外部参数的校正参数的处理。
3、根据本发明的第三方式,提供使处理器执行针对机器人的摄像机的校正处理的计算机程序。该计算机程序使所述处理器执行:(a)使用学习完毕的第一机器学习模型并根据由所述摄像机拍摄的机械臂的图像来推定在所述机械臂上预先设定的多个特征点的像素坐标值的处理;(b)使用学习完毕的第二机器学习模型并根据所述多个特征点的所述像素坐标值来推定三维摄像机坐标系中的所述多个特征点的第一坐标值的处理;(c)使用所述机械臂的编码器值来计算三维机器人坐标系中的所述多个特征点的第二坐标值的处理;以及(d)针对所述机械臂的多个姿态执行所述处理(a)~(c),使用所述多个姿态下的所述多个特征点的所述第一坐标值和所述第二坐标值来推定包含所述摄像机的外部参数的校正参数的处理。
技术特征:
1.一种校正方法,其特征在于,是针对机器人的摄像机的校正方法,
2.根据权利要求1所述的校正方法,其特征在于,
3.根据权利要求1所述的校正方法,其特征在于,
4.根据权利要求1所述的校正方法,其特征在于,
5.一种校正系统,其特征在于,是执行针对机器人的摄像机的校正处理的系统,
6.一种存储介质,其特征在于,存储使处理器执行针对机器人的摄像机的校正处理的计算机程序,
技术总结
本发明公开了针对机器人的摄像机的校正方法、系统以及存储介质,无需在机械臂上粘贴标记就能够进行摄像机的校准。本发明的方法包括:(a)使用第一机器学习模型,根据由摄像机拍摄的机械臂的图像来推定在机械臂上预先设定的多个特征点的像素坐标值的工序;(b)使用第二机器学习模型,根据多个特征点的像素坐标值来推定三维摄像机坐标系中的多个特征点的第一坐标值的工序;(c)使用机械臂的编码器值来计算三维机器人坐标系中的多个特征点的第二坐标值的工序;以及(d)针对机械臂的多个姿态执行工序(a)~(c),使用多个姿态下的多个特征点的第一坐标值和二坐标值来推定包含摄像机的外部参数的校正参数的工序。
技术研发人员:佐藤彰展
受保护的技术使用者:精工爱普生株式会社
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!