把持位置设定方法以及机器人系统与流程
本发明涉及把持位置设定方法以及机器人系统。
背景技术:
1、在专利文献1中记载有设定通过机器人的抓手把持把持对象物时的把持力的方法。具体而言,根据通过相机拍摄未附加把持力的状态下的把持对象物而得到的第一画像以及通过相机拍摄附加有把持力的状态下的把持对象物而得到的第二画像来求得因附加了把持力而产生的把持对象物的变形量,并基于求出的变形量来设定把持力。
2、专利文献1:国际公开2018/092254号公报
3、然而,在专利文献1中,对于把持对象物的把持位置并未特别地考虑。例如,相比于把持把持对象物的重心附近的情况,在把持远离重心的部位的情况下,需要将把持力设定得更高。另外,根据把持对象物的种类,存在限制把持力的上限值以防使把持对象物变形、破损的情况。因此,在未考虑把持对象的把持位置的专利文献1中,有时把持力会设定得高,有可能不能恰当地进行把持对象物的把持。
技术实现思路
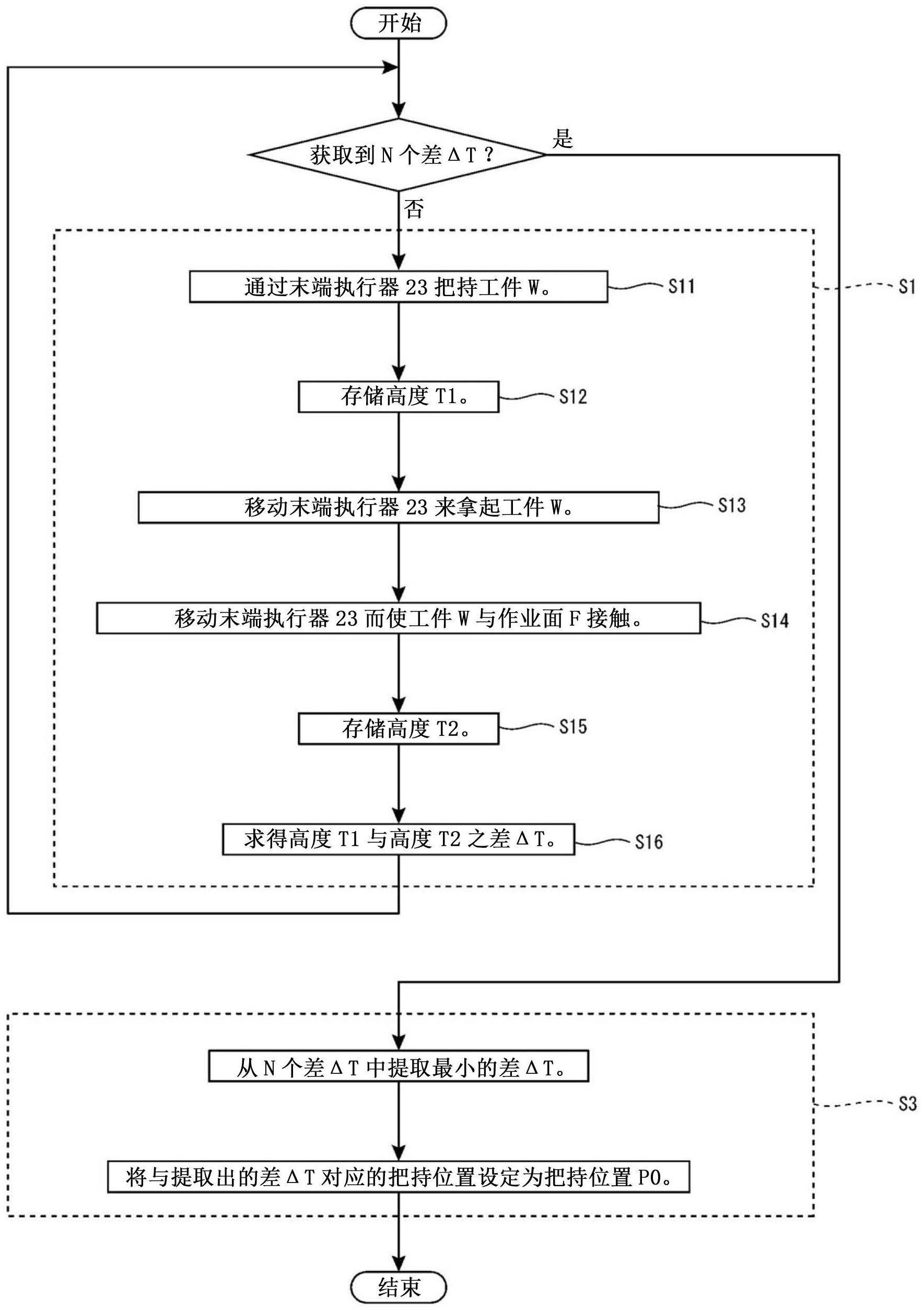
1、本发明的把持位置设定方法在具备机器人的机器人系统中设定末端执行器把持对象物的把持位置,所述机器人具有把持所述对象物的所述末端执行器,所述把持位置设定方法包括:作业步骤,通过所述末端执行器把持配置于作业面的所述对象物,将把持时的所述末端执行器的高度作为高度t1进行存储,使所述末端执行器向上侧移动而使所述对象物从所述作业面分离,使所述末端执行器向下侧移动而使所述对象物与所述作业面接触,将接触时的所述末端执行器的高度作为高度t2进行存储,并求得所述高度t1与所述高度t2之差δt;以及设定步骤,基于所述差δt来设定所述对象物的所述把持位置。
2、本发明的机器人系统具备机器人,所述机器人具有把持对象物的末端执行器,所述机器人系统执行:作业步骤,通过所述末端执行器把持配置于作业面的所述对象物,将把持时的所述末端执行器的高度作为高度t1进行存储,使所述末端执行器向上侧移动而使所述对象物从所述作业面分离,使所述末端执行器向下侧移动而使所述对象物与所述作业面接触,将接触时的所述末端执行器的高度作为高度t2进行存储,并求得所述高度t1与所述高度t2之差δt;以及设定步骤,基于所述差δt来设定所述对象物的把持位置。
技术特征:
1.一种把持位置设定方法,其特征在于,在具备机器人的机器人系统中设定末端执行器把持对象物的把持位置,所述机器人具有把持所述对象物的所述末端执行器,所述把持位置设定方法包括:
2.根据权利要求1所述的把持位置设定方法,其特征在于,
3.根据权利要求2所述的把持位置设定方法,其特征在于,
4.根据权利要求1所述的把持位置设定方法,其特征在于,
5.根据权利要求2或4所述的把持位置设定方法,其特征在于,
6.根据权利要求5所述的把持位置设定方法,其特征在于,
7.根据权利要求2或4所述的把持位置设定方法,其特征在于,
8.根据权利要求1所述的把持位置设定方法,其特征在于,
9.根据权利要求1所述的把持位置设定方法,其特征在于,
10.一种机器人系统,其特征在于,具备机器人,所述机器人具有把持对象物的末端执行器,所述机器人系统执行:
技术总结
本申请提供把持位置设定方法以及机器人系统,对于把持力的上限值受到限制的对象物也能够一面抑制对象物的变形、破损、一面稳定地进行把持。把持位置设定方法包括:作业步骤,通过末端执行器把持配置于作业面的对象物,将把持时的末端执行器的高度作为高度(T1)进行存储,使末端执行器向上侧移动而使对象物从作业面分离,使末端执行器向下侧移动而使对象物与作业面接触,将接触时的末端执行器的高度作为高度(T2)进行存储,并求得高度(T1)与高度(T2)之差(ΔT);以及设定步骤,基于差(ΔT)来设定对象物的把持位置。
技术研发人员:长田大辉
受保护的技术使用者:精工爱普生株式会社
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!