带旋转夹爪的重型机械手的制作方法
本发明涉及机械手,具体涉及一种带旋转夹爪的重型机械手。
背景技术:
1、机械手在工业规模化生产中应用比较广泛,其主要用于精确灵巧的抓取、转运轻型件,从而提高生产效率。对于重工业里的大型件,目前一般采用行车吊运,没有采用机械手,这是因为目前的机械手在结构和动力上均不能承受重型件的大体积和大重量,如果盲目增强结构和动力系统的话,设备成本和使用成本大幅增加,实用性差。
技术实现思路
1、本发明的目的是提供一种带旋转夹爪的重型机械手,本重型机械手适应各方向来料,方便抓取重型件,方便码垛,作业效率高,设备成本和使用成本大幅降低,适合推广使用。
2、本发明所采用的技术方案是:
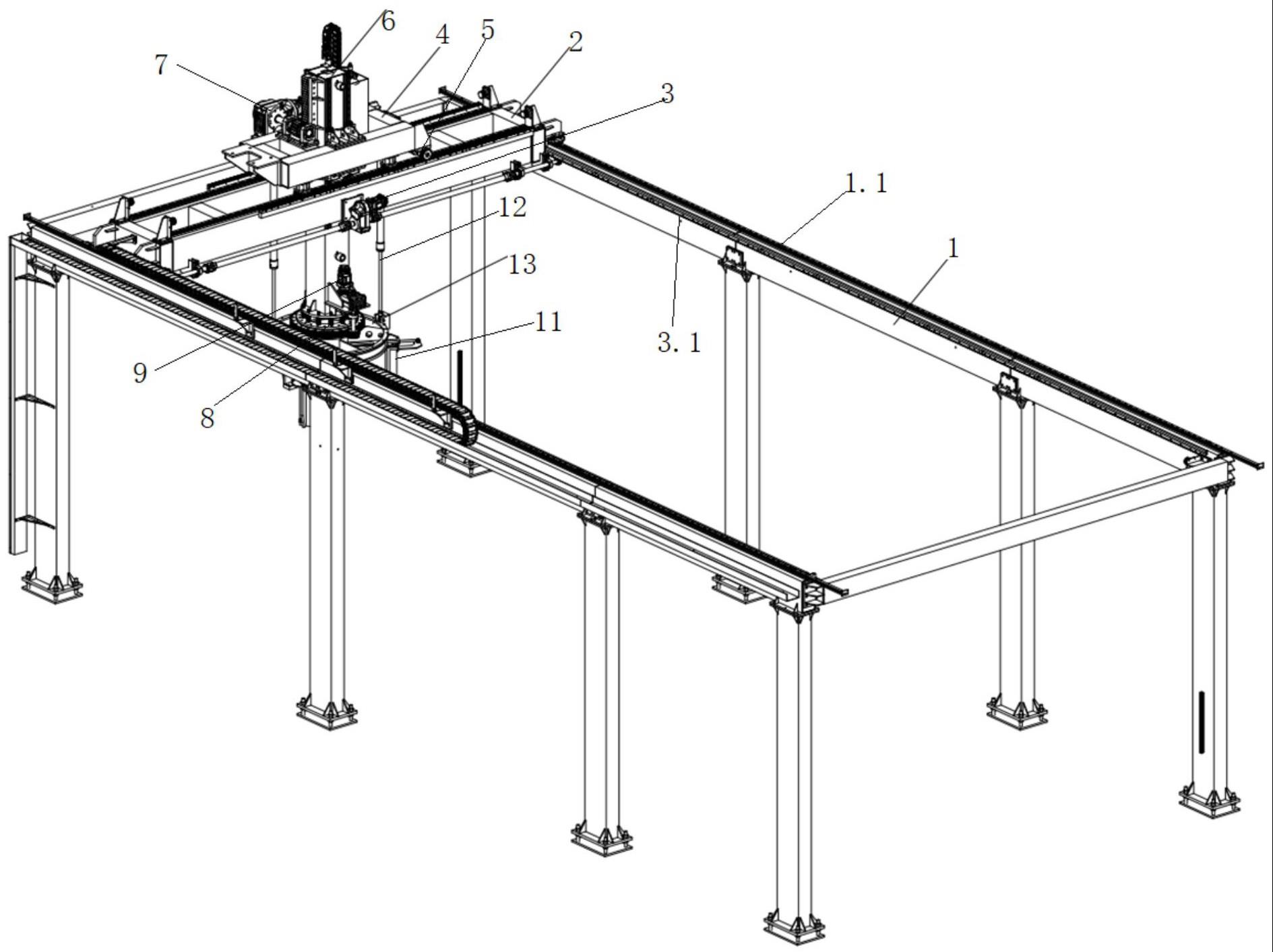
3、一种带旋转夹爪的重型机械手,包括承载架、纵移架、横移架、竖移架、旋转座、夹爪组件和平衡缸;承载架抬离地面且下方为通行区域;纵移架横跨支撑在承载架顶部两边且通过纵移架驱动机构实现纵向移动;横移架支撑在纵移架顶部两边且通过横移架驱动机构实现横向移动;竖移架配合在横移架中部且向下穿过纵移架中部,通过竖移架驱动机构实现竖向移动;旋转座的上下部分别为组装在一起的固定部和旋转部,固定部通过平面分布的弹簧连接在竖移架下端,旋转部通过旋转驱动机构实现旋转,夹爪组件设在旋转部下端;平衡缸安装在横移架上且绕旋转部分布,平衡缸向下穿过纵移架中部且下端铰接提钩,提钩支撑地钩在旋转部边缘下侧且二者之间滚动接触,夹爪组件、旋转座和竖移架通过平衡缸支撑在横移架上;平衡缸带有蓄能器,旋转部下降带动平衡缸伸长时蓄能器蓄能并提供阻力,旋转部上升时蓄能器释能并提供助力。
4、优选地,纵移架驱动机构包括第一齿条、第一电机、第一减速机、第一传动轴、端轴、第一轴承座和第一齿轮,第一齿条安装在承载架顶部两边,第一电机和第一减速机安装在纵移架上,第一减速机的输入端连接第一电机、两个输出端通过第一万向节分别连接两个第一传动轴,两个第一传动轴通过第二万向节分别连接两个端轴,两个端轴通过第一轴承座分别安装在纵移架的两边,第一齿轮安装在端轴上且与所在边的第一齿条啮合。
5、优选地,横移架驱动机构包括第二齿条、第二电机、第二减速机、第二传动轴、第二轴承座和第二齿轮,第二齿条安装在纵移架顶部两边,第二电机和第二减速机安装在横移架上,第二减速机的输入端连接第二电机、两个输出端通过第三万向节分别连接两个第二传动轴,两个第二传动轴通过第二轴承座分别安装在横移架的两边,第二齿轮安装在第二传动轴上且与所在边的第二齿条啮合。
6、优选地,竖移架驱动机构包括第三齿条、第三电机、第三减速机、第三传动轴、第三轴承座和第三齿轮,第三齿条安装在竖移架侧边,第三电机和第三减速机安装在横移架上,第三减速机的输入端连接第三电机、输出端连接第三传动轴,第三传动轴通过第三轴承座安装在横移架上,第三齿轮安装在第三传动轴上且与第三齿条啮合。
7、优选地,旋转驱动机构包括齿圈、第四电机、第四减速机、第四传动轴、第四轴承座和第四齿轮,齿圈安装在旋转部外圈,第四电机和第四减速机安装在竖移架上,第四减速机的输入端连接第四电机、输出端连接第四传动轴,第四传动轴通过第四轴承座安装在竖移架上,第四齿轮安装在第四传动轴上且与齿圈啮合。
8、优选地,旋转部边缘下侧安装镶条,提钩上安装牛眼轴承,镶条支撑在牛眼轴承上。
9、优选地,平衡缸与提钩的铰接处设置关节轴承。
10、优选地,弹簧绕轴心均布。
11、优选地,纵移架通过嵌合在一起的第一直线滑槽和第一直线滑轨横跨支撑在承载架顶部两边;横移架通过嵌合在一起的第二直线滑槽和第二直线滑轨支撑在纵移架顶部两边;竖移架的一对侧面通过嵌合在一起的第三直线滑槽和第三直线滑轨与横移架中部配合。
12、优选地,纵移架两端设有用于对横移架行程限位的横向位移限位块;竖移架上设有用于对上下行程进行限位的竖向位移限位块。
13、本发明的有益效果是:
14、本重型机械手适应各方向来料,方便抓取重型件,方便码垛,作业效率高,设备成本和使用成本大幅降低,适合推广使用。
技术特征:
1.一种带旋转夹爪的重型机械手,其特征在于:包括承载架、纵移架、横移架、竖移架、旋转座、夹爪组件和平衡缸;承载架抬离地面且下方为通行区域;纵移架横跨支撑在承载架顶部两边且通过纵移架驱动机构实现纵向移动;横移架支撑在纵移架顶部两边且通过横移架驱动机构实现横向移动;竖移架配合在横移架中部且向下穿过纵移架中部,通过竖移架驱动机构实现竖向移动;旋转座的上下部分别为组装在一起的固定部和旋转部,固定部通过平面分布的弹簧连接在竖移架下端,旋转部通过旋转驱动机构实现旋转,夹爪组件设在旋转部下端;平衡缸安装在横移架上且绕旋转部分布,平衡缸向下穿过纵移架中部且下端铰接提钩,提钩支撑地钩在旋转部边缘下侧且二者之间滚动接触,夹爪组件、旋转座和竖移架通过平衡缸支撑在横移架上;平衡缸带有蓄能器,旋转部下降带动平衡缸伸长时蓄能器蓄能并提供阻力,旋转部上升时蓄能器释能并提供助力。
2.如权利要求1所述的带旋转夹爪的重型机械手,其特征在于:纵移架驱动机构包括第一齿条、第一电机、第一减速机、第一传动轴、端轴、第一轴承座和第一齿轮,第一齿条安装在承载架顶部两边,第一电机和第一减速机安装在纵移架上,第一减速机的输入端连接第一电机、两个输出端通过第一万向节分别连接两个第一传动轴,两个第一传动轴通过第二万向节分别连接两个端轴,两个端轴通过第一轴承座分别安装在纵移架的两边,第一齿轮安装在端轴上且与所在边的第一齿条啮合。
3.如权利要求1所述的带旋转夹爪的重型机械手,其特征在于:横移架驱动机构包括第二齿条、第二电机、第二减速机、第二传动轴、第二轴承座和第二齿轮,第二齿条安装在纵移架顶部两边,第二电机和第二减速机安装在横移架上,第二减速机的输入端连接第二电机、两个输出端通过第三万向节分别连接两个第二传动轴,两个第二传动轴通过第二轴承座分别安装在横移架的两边,第二齿轮安装在第二传动轴上且与所在边的第二齿条啮合。
4.如权利要求1所述的带旋转夹爪的重型机械手,其特征在于:竖移架驱动机构包括第三齿条、第三电机、第三减速机、第三传动轴、第三轴承座和第三齿轮,第三齿条安装在竖移架侧边,第三电机和第三减速机安装在横移架上,第三减速机的输入端连接第三电机、输出端连接第三传动轴,第三传动轴通过第三轴承座安装在横移架上,第三齿轮安装在第三传动轴上且与第三齿条啮合。
5.如权利要求1所述的带旋转夹爪的重型机械手,其特征在于:旋转驱动机构包括齿圈、第四电机、第四减速机、第四传动轴、第四轴承座和第四齿轮,齿圈安装在旋转部外圈,第四电机和第四减速机安装在竖移架上,第四减速机的输入端连接第四电机、输出端连接第四传动轴,第四传动轴通过第四轴承座安装在竖移架上,第四齿轮安装在第四传动轴上且与齿圈啮合。
6.如权利要求1所述的带旋转夹爪的重型机械手,其特征在于:旋转部边缘下侧安装镶条,提钩上安装牛眼轴承,镶条支撑在牛眼轴承上。
7.如权利要求1所述的带旋转夹爪的重型机械手,其特征在于:平衡缸与提钩的铰接处设置关节轴承。
8.如权利要求1所述的带旋转夹爪的重型机械手,其特征在于:弹簧绕轴心均布。
9.如权利要求1所述的带旋转夹爪的重型机械手,其特征在于:纵移架通过嵌合在一起的第一直线滑槽和第一直线滑轨横跨支撑在承载架顶部两边;横移架通过嵌合在一起的第二直线滑槽和第二直线滑轨支撑在纵移架顶部两边;竖移架的一对侧面通过嵌合在一起的第三直线滑槽和第三直线滑轨与横移架中部配合。
10.如权利要求1所述的带旋转夹爪的重型机械手,其特征在于:纵移架两端设有用于对横移架行程限位的横向位移限位块;竖移架上设有用于对上下行程进行限位的竖向位移限位块。
技术总结
本发明公开一种带旋转夹爪的重型机械手,包括承载架、纵移架、纵移架驱动机构、横移架、横移架驱动机构、竖移架、竖移架驱动机构、旋转座、旋转驱动机构、夹爪组件、平衡缸;承载架抬离地面且下方为通行区域;旋转座的上下部分别为固定部和旋转部,固定部通过平面分布的弹簧连接在竖移架下端,夹爪组件设在旋转部下端;平衡缸下端铰接提钩,提钩支撑地钩在旋转部边缘下侧且二者之间滚动接触,夹爪组件、旋转座和竖移架通过平衡缸支撑在横移架上;平衡缸带有蓄能器,旋转部下降时蓄能器提供阻力,旋转部上升时蓄能器提供助力。本发明适应各方向来料,方便抓取重型件,方便码垛,作业效率高,设备成本和使用成本大幅降低,适合推广使用。
技术研发人员:王枫,吴磊,李小华,付鹏,王文涛,罗自明
受保护的技术使用者:武汉华夏精冲技术有限公司
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!