脱困方法、装置、设备及可读存储介质与流程
本申请实施例涉及自移动机器人,特别涉及一种脱困方法、装置、设备及可读存储介质。
背景技术:
1、随着人工智能(artificial intelligence,ai)的发展,各种自移动设备越来越多地应用于各个领域,比如服务机器人、清洁机器人、自移动售货机器人等。
2、行进过程中,若自移动设备被障碍物围困,则原地旋转,利用环境感知传感器采集的环境数据确定脱困方向,按照脱困方向行进以脱困。
3、然而,当前的脱困方法耗时长、安全性差。
技术实现思路
1、本申请实施例提供一种脱困方法、装置、设备及可读存储介质,将多种环境感知传感器采集的第一环境数据融合到当前代价地图,根据融合了各种传感器数据的当前代价地图确定脱困方向,脱困效率高、安全性高。
2、第一方面,本申请实施例提供一种脱困方法,应用于自移动设备,所述方法包括:
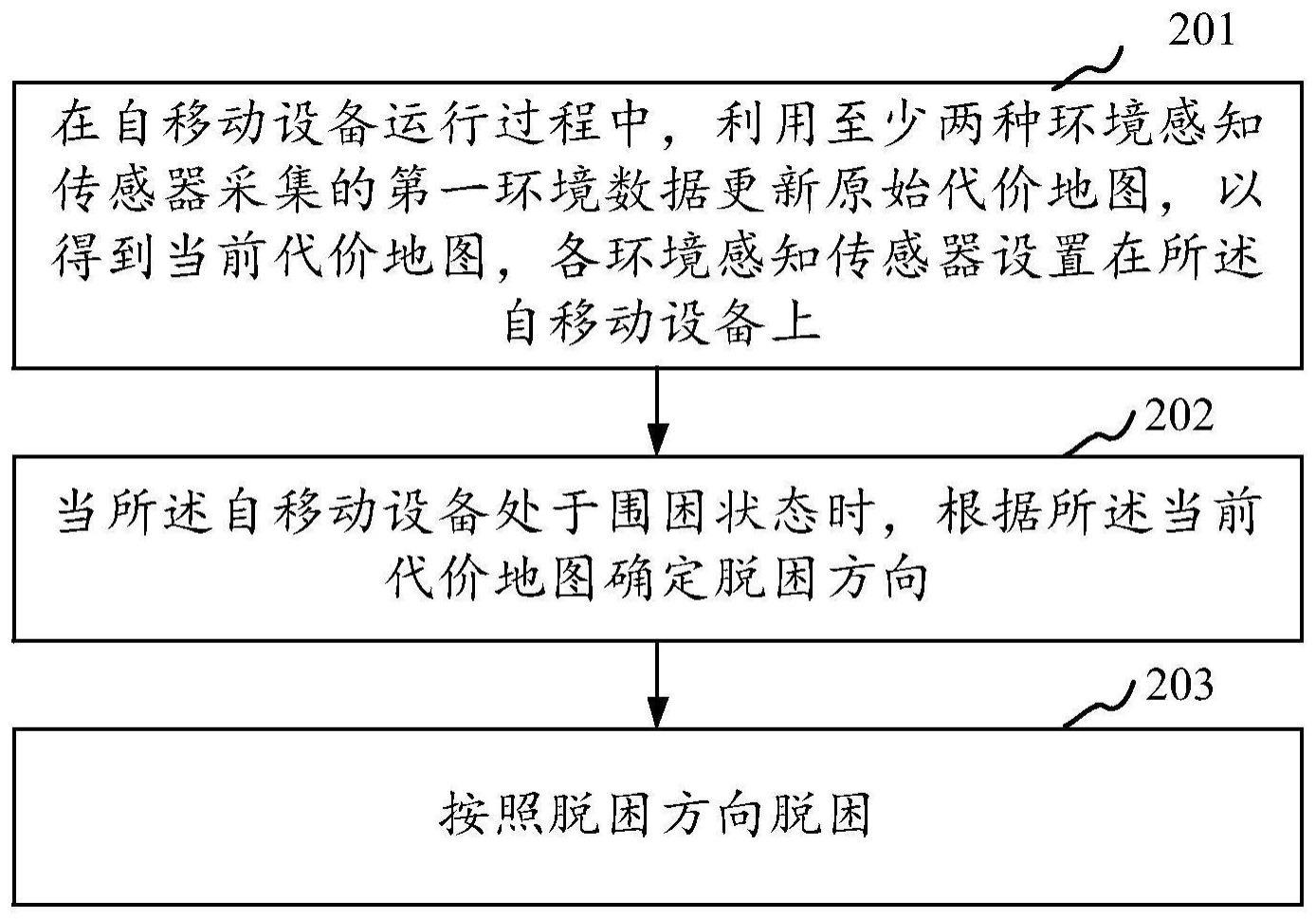
3、在自移动设备运行过程中,利用至少两种环境感知传感器采集的第一环境数据更新原始代价地图,以得到当前代价地图,各环境感知传感器设置在所述自移动设备上;
4、当所述自移动设备处于围困状态时,根据所述当前代价地图确定脱困方向;
5、按照所述脱困方向脱困。
6、第二方面,本申请实施例提供一种脱困装置,包括:
7、更新模块,用于在自移动设备运行过程中,利用至少两种环境感知传感器采集的第一环境数据更新原始代价地图,以得到当前代价地图,各环境感知传感器设置在所述自移动设备上;
8、处理模块,用于当所述自移动设备处于围困状态时,根据所述当前代价地图确定脱困方向;
9、脱困模块,用于按照所述脱困方向脱困。
10、第三方面,本申请实施例提供一种电子设备,包括:处理器、存储器及存储在所述存储器上并可在处理器上运行的计算机程序,所述处理器执行所述计算机程序时使得所述电子设备实现如上第一方面或第一方面各种可能的实现方式所述的方法。
11、第四方面,本申请实施例提供一种非易失性计算机可读存储介质,所述计算机可读存储介质中存储有计算机指令,所述计算机指令在被处理器执行时用于实现如上第一方面或第一方面各种可能的实现方式所述的方法。
12、第五方面,本申请实施例提供一种包含计算程序的计算机程序产品,所述计算机程序被处理器执行时实现如上第一方面或第一方面各种可能的实现方式所述的方法。
13、本申请实施例提供的脱困方法、装置、设备及可读存储介质,自移动设备上设置多种环境感知传感器,自移动设备预先存储原始代价地图和全局的环境地图。运行过程中,自移动设备利用各环境感知传感器采集的第一环境数据更新原始代价地图,以得到当前代价地图。当自移动设备处于围困状态时,根据当前代价地图确定脱困方向,并按照脱困方向脱困。采用该种方案,无需自移动设备原地边旋转边寻找缺口方向进而脱困,而是根据多种环境感知传感器采集的、用于指示当前环境状况的第一环境数据更新原始代价地图从而得到当前代价地图,根据当前代价地图确定脱困方向,脱困效率高、安全性高。另外,通过融合多种环境感知传感器的第一环境数据到当前代价地图,使得自移动设备更全面掌握周围环境中障碍物信息,有助于提高脱困方向的准确性。
技术特征:
1.一种脱困方法,其特征在于,应用于自移动设备,所述方法包括:
2.根据权利要求1所述的方法,其特征在于,所述当所述自移动设备处于围困状态时,根据所述当前代价地图确定脱困方向,包括:
3.根据权利要求2所述的方法,其特征在于,所述根据所述局部代价地图确定脱困方向,包括:
4.根据权利要求3所述的方法,其特征在于,所述确定所述栅格集合中各栅格对应的第一斥力,包括:
5.根据权利要求1~4任一项所述的方法,其特征在于,还包括:
6.根据权利要求1~4任一项所述的方法,其特征在于,所述在自移动设备运行过程中,利用至少两种环境感知传感器采集的第一环境数据更新原始代价地图,以得到当前代价地图,包括:
7.根据权利要求1~4任一项所述的方法,其特征在于,所述在自移动设备运行过程中,利用至少两种环境感知传感器采集的第一环境数据更新原始代价地图,以得到当前代价地图之前,还包括:
8.根据权利要求7所述的方法,其特征在于,所述根据各环境感知传感器的第二转换数据,生成原始代价地图,包括:
9.根据权利要求1~4任一项所述的方法,其特征在于,所述按照所述脱困方向脱困,包括:
10.一种脱困装置,其特征在于,包括:
11.一种电子设备,包括处理器、存储器及存储在所述存储器上并可在所述处理器上运行的计算机程序,其特征在于,所述处理器执行所述计算机程序时使得所述电子设备实现如权利要求1至9任一所述的方法。
12.一种非易失性计算机可读存储介质,其上存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现如权利要求1至9任一所述的方法。
技术总结
本申请实施例公开了一种脱困方法、装置、设备及可读存储介质,自移动设备上设置多种环境感知传感器。运行过程中,自移动设备利用各环境感知传感器采集的第一环境数据更新原始代价地图,以得到当前代价地图。当自移动设备处于围困状态时,根据当前代价地图确定脱困方向,并按照脱困方向脱困。采用该种方案,无需自移动设备原地边旋转边寻找缺口方向进而脱困,而是根据融合了多种环境感知传感器数据的当前代价地图确定脱困方向,脱困效率高、安全性高。
技术研发人员:谢凯旋,陈泽宇
受保护的技术使用者:科沃斯机器人股份有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!