一种间距可调的果实采摘柔性机械手
本发明涉及农业机械设备,特别涉及一种间距可调的果实采摘柔性机械手。
背景技术:
1、随着社会的发展,对于农业产品的需求也在日益增长。在农业生产过程中,水果和蔬菜的采摘工作仍然是最耗时和劳动密集型的任务,从而导致生产效率低下,产品竞争力有限。这是因为采摘工作费时费力,季节性强,劳动力的短缺更是使得问题加剧,大量的新鲜农产品就此浪费。因此果实采摘机械的开发具有广阔的发展前景和巨大的经济效益。
2、目前现有的果实采摘机械手通常为刚性结构,在采摘过程中容易损伤果实表面,因此柔性机械手能保证在采摘过程中果实表面的完整性。但是由于现有的柔性机械手往往是根据特定的果实进行设计的,其所能夹取的果实的大小是确定的,无法根据果实的大小进行调整,适用性不强,难以进行普及。
3、因此设计出间距可调整,适用范围广泛的果实采摘柔性机械手是具有实际应用意义的,也将为我国农业的发展做出贡献。
技术实现思路
1、本发明目的在于提供一种间距可调的果实采摘柔性机械手,以解决现有技术中所存在的一个或多个技术问题,至少提供一种有益的选择或创造条件。
2、为解决上述技术问题所采用的技术方案:
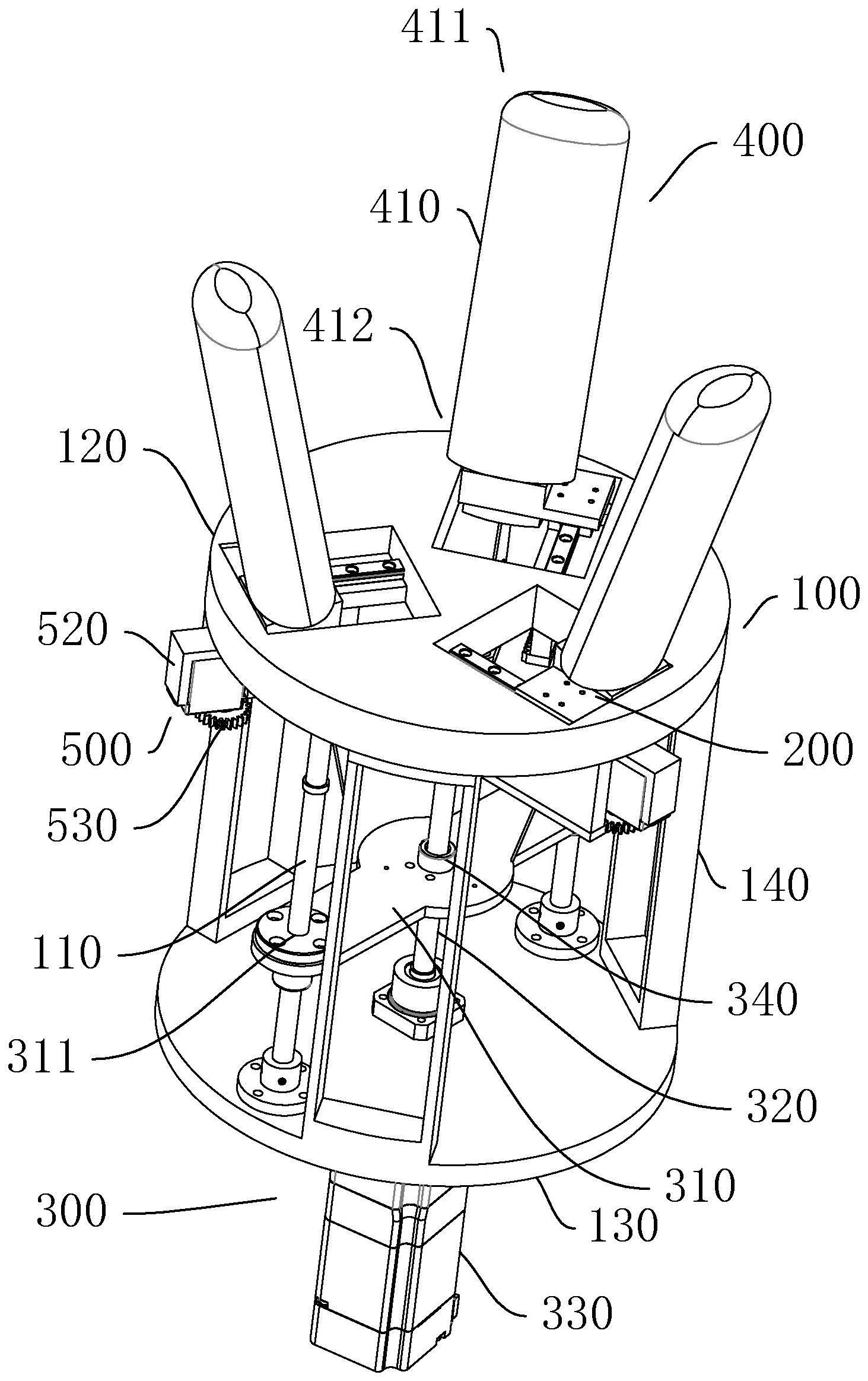
3、本发明提供一种间距可调的果实采摘柔性机械手,其包括:机架、间距调整模块和夹取模块,机架设有分布轴线;间距调整模块包括以所述分布轴线为中心呈环形间隔排列设于机架上的多个滑动座、与所述滑动座传动连接的调整驱动组件,所述调整驱动组件用于带动滑动座相对所述机架沿径向调节设置;夹取模块包括夹取驱动组件、多个柔性夹爪,所述柔性夹爪包括两端分为夹取端和连接端的柔性爪体、并排间隔设于柔性爪体内的薄板簧和拉绳,所述薄板簧和拉绳均沿柔性爪体延伸的方向设置,所述拉绳相对所述柔性爪体滑动设置,所述拉绳靠近所述夹取端的一端与薄板簧的端部连接,所述拉绳另一端穿过所述连接端后与夹取驱动组件连接,所述夹取驱动组件用于拉动所述拉绳,所述柔性爪体为柔性构件,所述连接端与滑动座一一对应连接。
4、本发明的有益效果是:在使用时,通过夹取驱动组件来拉扯拉绳,拉绳带动薄板簧和柔性爪体一起弯曲,整个柔性夹爪先拉绳的一侧弯曲,以模拟手指弯曲的动作,多个柔性夹爪相互配合以实现采摘水果的功能,而当夹取驱动组件松开拉绳后,在薄板簧的弹性复位力下,柔性夹爪实现复位,而实现夹取模块的松开,薄板簧能够为柔性夹爪提供原始刚度的同时还提供复位的弹力,而柔性夹爪通过柔性爪体来与水果表面接触,减少对果实表面的损伤;此外,可根据不同果实的大小和形状,通过调整驱动组件带动对应的滑动座相对所述机架沿径向移动调节,以调节多个柔性夹爪之间的间距。
5、作为上述技术方案的进一步改进,所述薄板簧两端分别连接有嵌在柔性爪体内的上固定块和下固定块,所述下固定块与滑动座连接,所述拉绳一端与上固定块连接。
6、本方案中的薄板簧通过上固定块和下固定块来实现与柔性爪体在延伸方向的加固,同时也给拉绳提供拉扯的作用点,本方案就将夹取端和连接端限定了方向,分别为上下设置的,拉绳的上端和薄板簧上端分别固定于上固定块两侧上,拉绳通过上固定块来拉动薄板簧往拉绳的一侧弯曲,而薄板簧在被拉动和复位时,薄板簧通过上固定块和下固定块来给柔性爪体提供作用力,而带动柔性爪体弯曲和复位,这样柔性爪体可采用更为柔性的材料。
7、作为上述技术方案的进一步改进,所述拉绳与薄板簧沿径向内外并排设置,所述柔性爪体从连接端往夹取端向外倾斜设置。
8、本方案中的柔性爪体在抓取果实时,其夹取端是往内侧弯曲靠拢的,也就是说夹取果实时往下拉动拉绳,而在松开果实时则薄板簧提高复位的弹力来实现柔性爪体往外的松开,这样可根据实际需求,来调节夹取驱动组件给拉绳提供的拉扯力,以提高果实夹取的稳定性。
9、作为上述技术方案的进一步改进,所述拉绳一端连接有嵌装在上固定块上的固定轮,在所述上固定块和下固定块均设有预留孔,所述拉绳穿过所述预留孔。
10、本方案中的柔性夹爪在制造时,先将薄板簧的两端连接在上固定块和下固定块上,将拉绳绑在固定轮上,再将固定轮嵌入在上固定块上,使得拉绳穿过在上固定块和下固定块上的预留孔,之后在装上柔性爪体。
11、其中柔性爪体采用硅胶注塑成型的,将完成好上述安装步骤的半成品放置在设计好的模具中,然后用硅胶灌注出柔性爪体。
12、作为上述技术方案的进一步改进,所述调整驱动组件包括多个单独与滑动座传动连接的调整驱动单元。
13、本方案采用多个调整驱动单元来分别驱动滑动座的移动,以调节每个柔性夹爪的位置,提高适用性。
14、作为上述技术方案的进一步改进,所述滑动座滑动安装于机架上,所述调整驱动单元包括固定于机架上的齿条、安装于滑动座上的调整电机、与调整电机连接的齿轮,所述齿轮与齿条啮合。
15、本方案通过调整电机带动齿轮转动,在齿轮与齿条啮合下,带动滑动座沿径向移动,从而实现对柔性夹爪径向位置的调节。
16、作为上述技术方案的进一步改进,所述夹取驱动组件包括连接座、驱动连接座直线运动的夹取驱动单元,多条所述拉绳另一端同时与连接座连接。
17、本方案通过夹取驱动单元带动连接座移动,连接座同时拉扯多条拉绳,以实现夹取的动作。
18、作为上述技术方案的进一步改进,所述连接座滑动安装于机架上,所述夹取驱动单元包括丝杆、与丝杆传动连接的升降电机、固定于连接座上的螺母座,所述丝杆与螺母座螺纹传动配合。
19、本方案通过升降电机带动丝杆转动,在丝杆与螺母座螺纹配合下,带动连接座移动,这样可提高连接座移动的精度,从而使得对果汁的夹取力准确,避免损坏果实。
20、作为上述技术方案的进一步改进,所述机架设有若干导向光轴,所述连接座通过直线轴承与导向光轴滑动配合。
21、本方案通过直线轴承与导向光轴滑动配合来实现对连接座的导向,保证连接座运动的稳定性。
技术特征:
1.一种间距可调的果实采摘柔性机械手,其特征在于:其包括:
2.根据权利要求1所述的一种间距可调的果实采摘柔性机械手,其特征在于:
3.根据权利要求2所述的一种间距可调的果实采摘柔性机械手,其特征在于:
4.根据权利要求2所述的一种间距可调的果实采摘柔性机械手,其特征在于:
5.根据权利要求1所述的一种间距可调的果实采摘柔性机械手,其特征在于:
6.根据权利要求5所述的一种间距可调的果实采摘柔性机械手,其特征在于:
7.根据权利要求1所述的一种间距可调的果实采摘柔性机械手,其特征在于:
8.根据权利要求7所述的一种间距可调的果实采摘柔性机械手,其特征在于:
9.根据权利要求8所述的一种间距可调的果实采摘柔性机械手,其特征在于:
10.根据权利要求1所述的一种间距可调的果实采摘柔性机械手,其特征在于:
技术总结
本发明公开了一种间距可调的果实采摘柔性机械手,其包括:机架、间距调整模块和夹取模块;间距调整模块包括呈环形间隔排列设于机架上的多个滑动座、调整驱动组件,调整驱动组件用于带动滑动座相对机架沿径向调节设置;夹取模块包括夹取驱动组件、多个柔性夹爪,柔性夹爪包括柔性爪体、并排间隔设于柔性爪体内的薄板簧和拉绳,拉绳靠近夹取端的一端与薄板簧的端部连接,拉绳另一端穿过连接端后与夹取驱动组件连接,夹取驱动组件用于拉动拉绳,柔性爪体为柔性构件,连接端与滑动座连接。可根据不同果实的大小和形状,通过调整驱动组件带动对应的滑动座相对机架沿径向移动调节,以调节多个柔性夹爪之间的间距。
技术研发人员:彭雄斌,欧阳俊杰,史晓文
受保护的技术使用者:汕头大学
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!