一种基于打磨机器人的变刚度打磨控制方法与流程
本发明涉及打磨机器人,尤其是一种基于打磨机器人的变刚度打磨控制方法。
背景技术:
1、随着科学技术的发展,我国随着智能制造的不断发展,越来越多的企业将机器人引入到打磨作业中,相较于人工手动打磨,采用机器人打磨技术具有良好的力控制性能和打磨精度,因此使用机器人进行打磨具有重要的实用意义。
2、由于工作环境和任务变得多样复杂,这对机器人的性能提出了更高的要求,而针对工件打磨项目来说,打磨任务、工作环境和精度要求变得多样复杂,这对机器人的性能提出了更高的要求。
3、目前传统的机器人打磨方式是将待打磨工件放置于一个固定的工作台上,接着用一个机械臂去进行打磨,由于机器人的工作空间是有限,所以在打磨工作中,一般只能打磨单个面,对于有多个面需要打磨的工件来说,机器人坐标标定,打磨方位,打磨刚度都需要随着变成改动,严重影响加工效率;不仅如此,实际打磨中可能还要面临各种变化,需要机器人进行应对。
4、为解决上述问题,近年来也有一些相应的机器人打磨技术方案。例如,专利cn110281152a提出了一种基于在线试触的机器人恒力打磨路径规划方法及系统,其特点是通过在线试触的方式获取待打磨表面的离散点信息,并据此信息规划待打磨表面打磨路径。
5、然而该专利仍是离线编程再使用,而且为了消除定位、变形等误差,针对每个工件都需要重新规划路径,实用性低,效率也低。
技术实现思路
1、针对现有技术的不足,本发明提供一种基于打磨机器人的变刚度打磨控制方法。
2、本发明的技术方案为:一种基于打磨机器人的变刚度打磨控制方法,包括以下步骤:
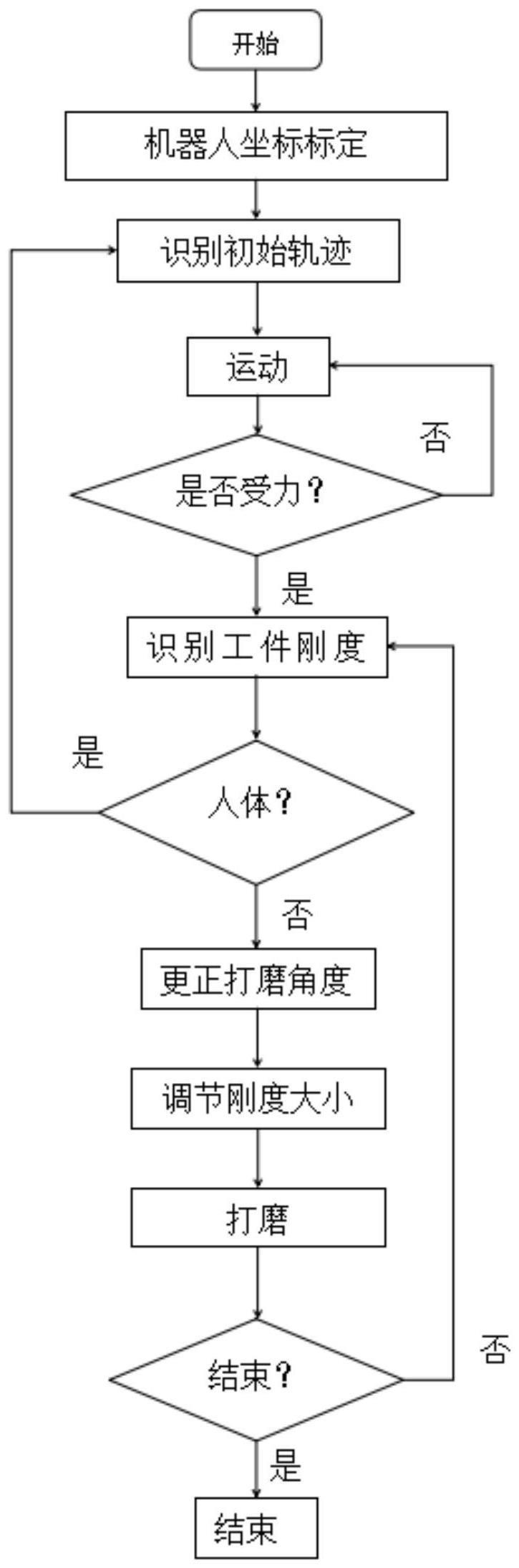
3、s1)、启动机器人控制器,进行机器人工具坐标系标定及空间坐标系标定;
4、s2)、导入自动生成的打磨轨迹,根据打磨轨迹的运行轨迹点使安装在六自由度打磨机器人末端的变刚度打磨装置移动至工件边缘附近;
5、s3)、控制器接收来自六维力传感器的信号,根据信号解析打磨装置是否与工件接触,若识别结果为未接触,则继续向目标点移动,若辨识为接触,则匹配刚度信息;
6、s4)、根据机器人控制器得到的力传感器信号,控制机器人末端移动,并且打磨装置根据工件刚度的变化,实时改变打磨力矩,实现多方向,多角度的变刚度打磨。
7、作为优选的,步骤s1)中,所述的机器人为六自由度打磨机器人,所述的六维力传感器设置在六自由度打磨机器人的末端,所述的六自由度打磨机器人的末端还安装有打磨装置。
8、作为优选的,步骤s1)中,所述的机器人通过相机采集机器人的图像并传输给控制器,以进行机器人位置校正。
9、作为优选的,步骤s3)中,若识别结果为人体,则停止动作,并重新规划路径。
10、本发明的有益效果为:
11、1、采用了力导纳控制及图像信息辅助校正,根据采集的力信息以及图像信息调整机器人的位置;
12、2、本发明采用变刚度打磨装置,方便快捷适用于各类工件的打磨,实用性强;
13、3、本发明可以在打磨过程中根据实际情况调整打磨刚度。
技术特征:
1.一种基于打磨机器人的变刚度打磨控制方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的一种基于打磨机器人的变刚度打磨控制方法,其特征在于:步骤s1)中,所述的机器人为六自由度打磨机器人,并且在所述的六自由度打磨机器人的末端安装有六维力传感器和打磨装置。
3.根据权利要求1所述的一种基于打磨机器人的变刚度打磨控制方法,其特征在于:步骤s1)中,所述的机器人通过相机采集机器人的图像并传输给控制器,以进行机器人位置校正。
4.根据权利要求1所述的一种基于打磨机器人的变刚度打磨控制方法,其特征在于:步骤s3)中,若识别结果为人体,则停止动作,并重新规划路径。
技术总结
本发明提供一种基于打磨机器人的变刚度打磨控制方法,包括S1)、进行机器人工具坐标系标定及空间坐标系标定;S2)、导入自动生成的打磨轨迹,根据打磨轨迹的运行轨迹点使安装在打磨机器人末端的打磨装置移动至工件边缘附近;S3)、控制器接收六维力传感器的信号,根据信号解析打磨装置是否与工件接触,若识别结果为未接触,则继续向目标点移动,若辨识为接触,则匹配刚度信息;S4)、根据机器人控制器得到的力传感器信号,控制机器人末端移动,并且打磨装置根据工件刚度的变化,实时改变打磨力矩,实现多方向,多角度的变刚度打磨。本发明采用了力导纳控制及图像信息辅助校正机器人的位置;可根据工件刚度进行打磨刚度、角度调整。
技术研发人员:王剑城,黄浩晖,杨辰光,戴诗陆
受保护的技术使用者:佛山纽欣肯智能科技有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!