一种探寻抓取机器人的制作方法
本发明涉及探寻机器人,具体是指一种探寻抓取机器人。
背景技术:
1、不同种类的病毒、细菌、真菌等病媒生物的传播是大多数疾病的主要途径。尤其是在出现突发性疫情时,如何有效控制病媒生物的传播成为了一个重要的问题。因此,开发一种能够抓取死亡病媒生物的机器人可以有效地降低病媒生物的密度,从而控制疫情的扩散。现有的探寻抓取机器人存在一下缺陷:不同类型的病媒生物在外形、大小、活动状态等方面存在各种差异,现有的机器人技术无法适应所有种类的病媒生物,抓取能力不足;机器人后端无探照灯和摄像头,在倒车过程中,机器人存在视野盲区;机器人依靠滚轮自身能力越障,越障等适应环境的能力不足。
技术实现思路
1、本发明为解决上述的各种问题,提供了一种探寻抓取机器人。
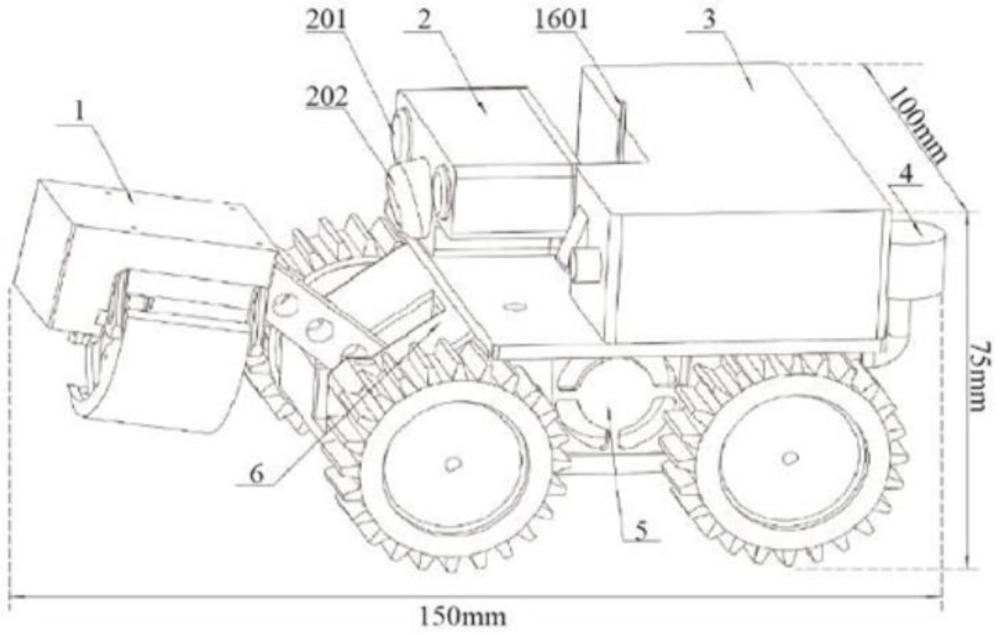
2、为解决上述技术问题,本发明的技术方案为:一种探寻抓取机器人,包括机器人本体和远程控制平台,机器人本体和远程控制平台通过无线通信连接,机器人本体包括抓取机构、视觉检测装置和底盘,底盘安装有抓取机构,底盘上方设置有视觉检测装置,底盘底部安装有多个滚轮;
3、抓取机构包括抓手、拉臂、配重盒、抓手底座、升降臂、升降装置底座和升降电机,抓手底座上安装有两个抓手,抓手底座上还固定安装有配重盒,抓手连接有拉臂,拉臂远离抓手的一端固定连接有抓手电机的输出轴;抓手底座铰接有升降臂,升降臂远离抓手底座的一端与升降电机铰接,升降电机固定安装在升降装置底座上,升降电机启动能够带动抓手底座和升降臂上下移动,且抓手电机能够带动抓手实现对死亡隐匿病媒生物的抓取,升降装置底座通过螺栓固定连接在底盘上;
4、视觉检测装置包括探照灯、监控相机和视频wifi模块,探照灯和监控相机与视觉检测装置的连接方式为卡接;视觉检测装置通过视频wifi模块与外部监视器通信连接,外部监视器显示监控相机所摄图像;
5、远程控制平台包括遥控手柄,遥控手柄和机器人本体无线通信连接,遥控手柄上设有显示器。
6、进一步地,底盘上还安装有前盖板、上盖板和驱动电机,上盖板通过定位螺丝与底盘连接,底盘上设置有电池仓,电池仓和上盖板之间通过定位螺丝固定连接,电池仓上安装有充电口,驱动电机与底盘通过卡箍固定连接。
7、进一步地,底盘的侧壁安装有用于散热的扇热装置。
8、进一步地,底盘的底表面开设有卡槽,卡槽内安装有红外相机,底盘上还安装有电子调速器,电子调速器的右侧安装有无线图传,电子调速器和无线图传与底盘的连接方式均为卡接,无线图传上安装有摄像头图像传输发射天线,无线图传和摄像头图像传输发射天线的连接方式为螺纹连接;上盖板的上表面安装有遥控信号接收机,遥控信号接收机通过胶连接固定于上盖板上,遥控信号接收机通过接收和发射天线无线连接有遥控手柄,接收和发射天线与遥控信号接收机为焊接,遥控信号接收机的左侧设置有摄像云台旋转电机,摄像云台旋转电机和通过定位螺丝固定于上盖板上,摄像云台旋转电机与视觉检测装置通过螺栓固定连接。
9、进一步地,遥控手柄内部设有stm32f072单片机将指令通过接收和发射天线传送给遥控信号接收机,遥控信号接收机将信号分发给电子调速器,电子调速器中设有microchippic12f单片机,然后通过pwm给驱动电路信号进而控制驱动电机,监控相机将录取的图像通过无线图传传输给遥控手柄,显示在遥控手柄的显示器上。
10、进一步地,遥控手柄上插入有内存卡,来存储录取的图像。
11、本发明与现有技术相比优点在于:
12、1、前端高清摄像:为提高探寻抓取机器人的探寻识别能力,机器人前端装备有高清摄像头并配备探照灯,探照观察探照观察有效距离大约为2米,机器人携带电池的电量可维持机器人探寻识别和运动,前端高清摄像在机器人运动的过程中可有效了解集装箱内部的环境状况以及有无病媒生物的情况,满足机器人的探寻识别需求。
13、2、后端红外摄像:为减少电源损耗,不在探寻抓取机器人后端配备探照灯,而在探寻抓取机器人后端装备有红外相机,视野观察有效距离大约为1米,满足机器人在倒车过程中观察后部视野的需求。
14、3、抓取和避障功能:探寻抓取机器人前端装备有抓取机构,依靠升降臂和升降电机可上下运动,抓手可向内向外运动,在机器人到达死亡病媒生物面前时,通过调整抓取机构的上下位置和向内向外的宽度来满足抓取死亡病媒生物的需要,探寻抓取机器人的抓取机构可抓取不超过300克的死亡病媒生物,基本满足既定需求。抓取机构除了用来抓取死亡病媒生物外,在机器人前进或后退过程中遇到障碍,通过调整抓取机构的上下位置可增加机器人的越障能力和运行效率。
技术特征:
1.一种探寻抓取机器人,包括机器人本体和远程控制平台,机器人本体和远程控制平台通过无线通信连接,其特征在于:机器人本体包括抓取机构、视觉检测装置和底盘,底盘安装有抓取机构,底盘上方设置有视觉检测装置,底盘底部安装有多个滚轮;
2.根据权利要求1所述的一种探寻抓取机器人,其特征在于:底盘上还安装有前盖板、上盖板和驱动电机,上盖板通过定位螺丝与底盘连接,底盘上设置有电池仓,电池仓和上盖板之间通过定位螺丝固定连接,电池仓上安装有充电口,驱动电机与底盘通过卡箍固定连接。
3.根据权利要求2所述的一种探寻抓取机器人,其特征在于:底盘的侧壁安装有用于散热的扇热装置。
4.根据权利要求2或3所述的一种探寻抓取机器人,其特征在于:底盘的底表面开设有卡槽,卡槽内安装有红外相机,底盘上还安装有电子调速器,电子调速器的右侧安装有无线图传,电子调速器和无线图传与底盘的连接方式均为卡接,无线图传上安装有摄像头图像传输发射天线,无线图传和摄像头图像传输发射天线的连接方式为螺纹连接;上盖板的上表面安装有遥控信号接收机,遥控信号接收机通过胶连接固定于上盖板上,遥控信号接收机通过接收和发射天线无线连接有遥控手柄,接收和发射天线与遥控信号接收机为焊接,遥控信号接收机的左侧设置有摄像云台旋转电机,摄像云台旋转电机和通过定位螺丝固定于上盖板上,摄像云台旋转电机与视觉检测装置通过螺栓固定连接。
5.根据权利要求4所述的一种探寻抓取机器人,其特征在于:遥控手柄内部设有stm32f072单片机将指令通过接收和发射天线传送给遥控信号接收机,遥控信号接收机将信号分发给电子调速器,电子调速器中设有microchippic12f单片机,然后通过pwm给驱动电路信号进而控制驱动电机,监控相机将录取的图像通过无线图传传输给遥控手柄,显示在遥控手柄的显示器上。
6.根据权利要求5所述的一种探寻抓取机器人,其特征在于:遥控手柄上插入有内存卡,来存储录取的图像。
技术总结
本发明公开了一种探寻抓取机器人,包括机器人本体和远程控制平台,机器人本体包括抓取机构、视觉检测装置和底盘,视觉检测装置包括探照灯、监控相机和视频WiFi模块,探照灯和监控相机与视觉检测装置的连接方式为卡接;视觉检测装置通过视频WiFi模块与外部监视器通信连接,外部监视器显示监控相机所摄图像;本发明与现有技术相比优点在于:前端高清摄像,提高探寻抓取机器人的探寻识别能力;后端红外摄像,满足机器人在倒车过程中观察后部视野的需求;抓取和避障功能:抓取机构满足抓取不同大小死亡病媒生物的需要,也能通过调整抓取机构的上下位置可增加机器人的越障能力和运行效率。
技术研发人员:王岩,闫吉辉,王厚晏,陈庆,党安芳,王俊,苑鑫,赵为民,孙嗣琦,楚翔,荆倩颖,陈常正,葛骏,王依庭
受保护的技术使用者:山东鲁检科技有限公司
技术研发日:
技术公布日:2024/2/29
- 还没有人留言评论。精彩留言会获得点赞!