一种工业机器人远程监控系统的制作方法
本发明属于机器人,具体的说是一种工业机器人远程监控系统。
背景技术:
1、随着现代科技的快速发展,信息化技术也越来越高,机器人的使用也越加频繁。
2、现有技术中工业监控机器人主要是通过底座、机器人本体和监控摄像头构成,在使用过程中,通过操控机器人,对其输入指定的命令,使其在指定的路线上移动,从而可实现监控作业。
3、但是现有技术中,机器人在长时间的使用过程中发现,监控摄像头上容易产生灰尘和杂质的粘附,导致灰尘和杂质挡在监控摄像头的前方,从而对监控画面的清晰度造成一定的影响,为此,本发明提供一种工业机器人远程监控系统。
技术实现思路
1、为了弥补现有技术的不足,解决背景技术中所提出的至少一个技术问题。
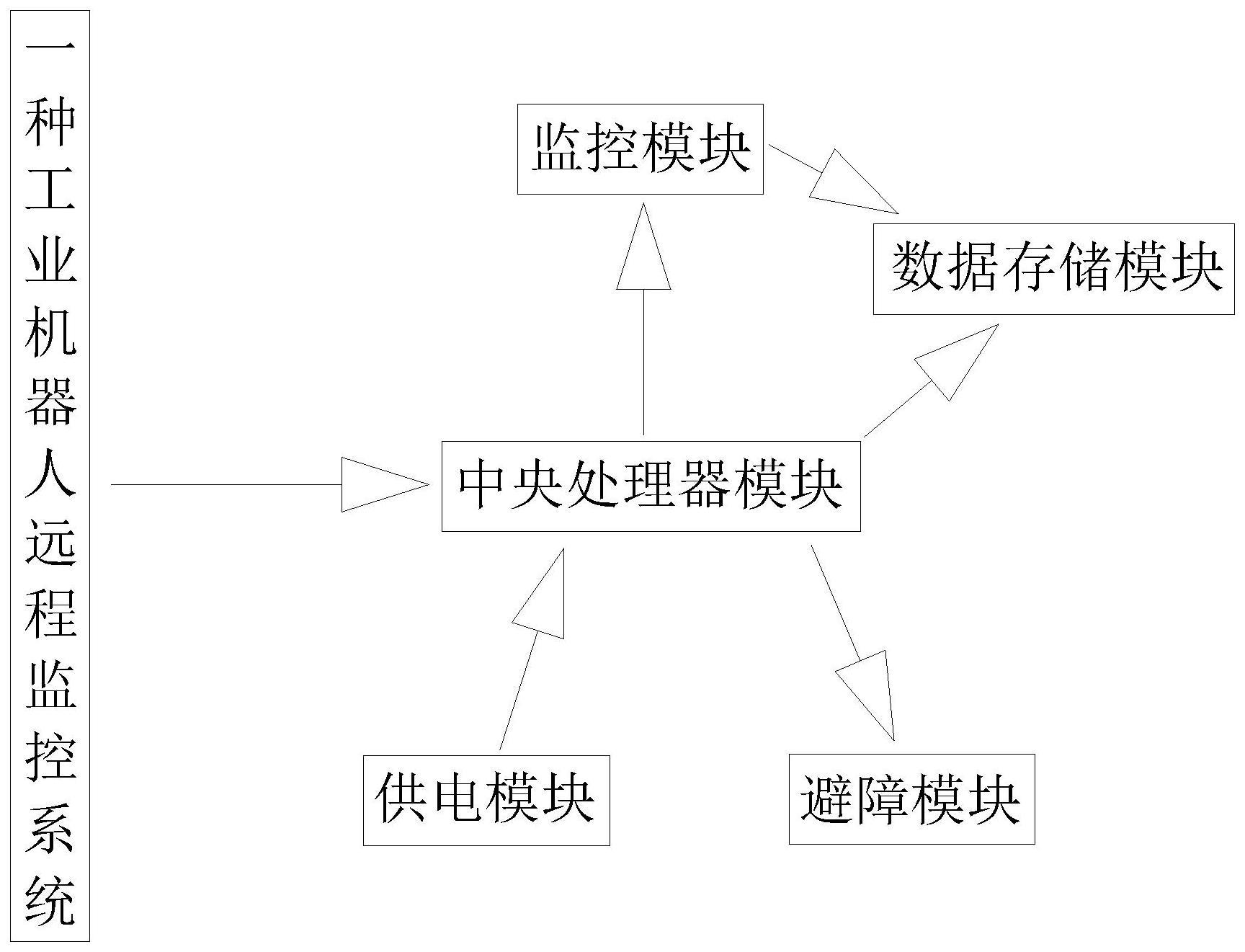
2、本发明解决其技术问题所采用的技术方案是:本发明所述的一种工业机器人远程监控系统,包括中央处理器模块、监控模块、供电模块、避障模块、数据存储模块;所述中央处理器模块、监控模块、供电模块、避障模块、数据存储模块设置在机器人内部;
3、所述中央处理器模块与供电模块通过电性连接;其为中央处理器模块进行供电;
4、所述中央处理器模块与监控模块通过信号连接;所述监控模块可对外界进行实时监控,并将所监控的画面传输至监控室的显示屏上;此时通过在机器人上设置的监控模块,进而可提高监控效果。
5、
6、优选的,所述监控模块与数据存储模块通过信号连接;所述监控模块所监控到的画面可传输至数据存储模块,对所监控的数据进行存储;此时通过设置的数据存储模块,进而起到对监控画面的实时记录存储的作用。
7、优选的,所述中央处理器模块与避障模块通过信号连接;所述避障模块在检测到机器人前方出现障碍物时,可进行主动避障;此时通过设置的避障模块,进而起到对机器人的防护作用。
8、一种工业机器人远程监控装置,该装置适用于上述的一种工业机器人远程监控系统,所述监控模块包括摄像头本体;所述摄像头本体侧壁固接有安装板;所述安装板侧壁固接有电推杆;所述电推杆端部固接有固定板;所述固定板侧壁开设有多个通孔;多个所述通孔均匀分布于固定板侧壁上;所述固定板侧壁固接有多个伸缩杆;多个所述伸缩杆均匀分布于固定板侧壁上;所述伸缩杆侧壁固接有弹簧;所述伸缩杆与弹簧端部固接同一个有海绵条;此时通过海绵条对摄像头本体表面进行擦拭,进而起到对摄像头本体表面上灰尘和杂质的清洁作用。
9、优选的,所述摄像头本体侧壁固接有一对滑轨;一对所述滑轨呈对称设置在摄像头本体两侧;所述滑轨内侧壁滑动连接有滑块;所述滑轨内侧壁固接有一对凸块;一对所述凸块呈对称设置在滑轨两侧;所述滑块侧壁固接有一对橡胶块;一对所述橡胶块呈对称设置在滑块两侧;所述滑块侧壁固接同一个有收集盒;此时通过将收集盒安装在海绵条下方,进而起到对灰尘和杂质的收集作用。
10、优选的,所述滑块侧壁铰接有一对卡块;一对所述卡块呈对称设置在滑块两侧;所述滑轨侧壁开设有一对卡槽;一对所述卡槽呈对称设置在滑轨两侧;此时通过卡块卡进卡槽侧壁上,进而增加滑块在滑轨内侧壁上的固定作用。
11、优选的,所述收集盒内侧壁固接有一对防护板;一对所述防护板呈对称设置在收集盒两侧;此时通过设置的防护板,进而起到对收集盒内部中灰尘和杂质的防洒出作用。
12、优选的,所述海绵条侧壁固接有一对固定条;一对所述固定条呈对称设置在海绵条两侧;此时通过设置的固定条,进而起到对海绵条的固定作用,同时增加海绵条的使用寿命。
13、本发明的有益效果如下:
14、1.本发明所述的一种工业机器人远程监控系统,通过设置的海绵条,降低摄像头本体在长时间的使用过程中,导致摄像头本体表面上粘附有较多的灰尘和杂质,阻挡在摄像头本体的前方,从而对摄像头本体所拍摄的画面清晰度造成一定的影响,此时通过海绵条对摄像头本体表面进行擦拭,进而起到对摄像头本体表面上灰尘和杂质的清洁作用。
15、2.本发明所述的一种工业机器人远程监控系统,通过设置的收集盒,降低被海绵条擦拭掉的灰尘和杂质掉落在地面上,导致工作人员对其清理时较为繁琐,从而造成增加一定的工作量,此时通过将收集盒安装在海绵条下方,进而起到对灰尘和杂质的收集作用。
技术特征:
1.一种工业机器人远程监控系统,其特征在于:包括中央处理器模块、监控模块、供电模块、避障模块、数据存储模块;所述中央处理器模块、监控模块、供电模块、避障模块、数据存储模块设置在机器人内部;
2.根据权利要求1所述的一种工业机器人远程监控系统,其特征在于:所述监控模块与数据存储模块通过信号连接;所述监控模块所监控到的画面可传输至数据存储模块,对所监控的数据进行存储。
3.根据权利要求1所述的一种工业机器人远程监控系统,其特征在于:所述中央处理器模块与避障模块通过信号连接;所述避障模块在检测到机器人前方出现障碍物时,可进行主动避障。
4.一种工业机器人远程监控装置,该装置适用于权利要求1-3中的一种工业机器人远程监控系统,其特征在于:所述监控模块包括摄像头本体(1);所述摄像头本体(1)侧壁固接有安装板(11);所述安装板(11)侧壁固接有电推杆(12);所述电推杆(12)端部固接有固定板(13);所述固定板(13)侧壁开设有多个通孔(14);多个所述通孔(14)均匀分布于固定板(13)侧壁上;所述固定板(13)侧壁固接有多个伸缩杆(15);多个所述伸缩杆(15)均匀分布于固定板(13)侧壁上;所述伸缩杆(15)侧壁固接有弹簧(16);所述伸缩杆(15)与弹簧(16)端部固接同一个有海绵条(17)。
5.根据权利要求4所述的一种工业机器人远程监控装置,其特征在于:所述摄像头本体(1)侧壁固接有一对滑轨(2);一对所述滑轨(2)呈对称设置在摄像头本体(1)两侧;所述滑轨(2)内侧壁滑动连接有滑块(21);所述滑轨(2)内侧壁固接有一对凸块(22);一对所述凸块(22)呈对称设置在滑轨(2)两侧;所述滑块(21)侧壁固接有一对橡胶块(23);一对所述橡胶块(23)呈对称设置在滑块(21)两侧;所述滑块(21)侧壁固接同一个有收集盒(24)。
6.根据权利要求5所述的一种工业机器人远程监控装置,其特征在于:所述滑块(21)侧壁铰接有一对卡块(3);一对所述卡块(3)呈对称设置在滑块(21)两侧;所述滑轨(2)侧壁开设有一对卡槽(31);一对所述卡槽(31)呈对称设置在滑轨(2)两侧。
7.根据权利要求5所述的一种工业机器人远程监控装置,其特征在于:所述收集盒(24)内侧壁固接有一对防护板(4);一对所述防护板(4)呈对称设置在收集盒(24)两侧。
8.根据权利要求4所述的一种工业机器人远程监控装置,其特征在于:所述海绵条(17)侧壁固接有一对固定条(5);一对所述固定条(5)呈对称设置在海绵条(17)两侧。
技术总结
本发明属于机器人技术领域,具体的说是一种工业机器人远程监控系统,包括中央处理器模块、监控模块、供电模块、避障模块、数据存储模块;所述中央处理器模块、监控模块、供电模块、避障模块、数据存储模块设置在机器人内部;在使用时,首先启动机器人,之后向机器人输入指定的指令后,此时机器人会进行移动,从而可对指定路线的区域进行监控,然后将所监控的画面实时传输至监控室内的显示屏上,以供工作人员对其进行查看,该过程中,降低通过人工进行监控时,时间长了会出现疲劳,导致所监控的效果不佳,同时会浪费大量的人力,此时通过在机器人上设置的监控模块,进而可提高监控效果。
技术研发人员:郑碎武,乔红,马秋立,卢福平,文景先
受保护的技术使用者:惠州中科先进制造有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!