一种工业设备拆分机器人的制作方法
本发明涉及拆分机器人,尤其涉及一种工业设备拆分机器人。
背景技术:
1、工业设备外围大多通过钢板与螺栓实施拼接组装以构成其外围壳体,通过壳体能够起到防护作用,在将回收的工业设备外壳实施拆分过程中需要将该壳体四周的钢板实施拆分,在拆分过程中需要将表面各连接部位的螺栓一一拆卸。在对钢板螺栓实施拆分的过程中,通常会出现如下专利中存在的问题,参见公开号为cn108437380a的专利公开了一种注塑件浇口自动拆分设备,包括料盘、用于输送料盘的料盘输送机构、对同模注塑的注塑件进行拆分的注塑件浇口分离机构及工业机器人,所述注塑件浇口分离机构包括两个转轴、翻转单元、定位单元和旋转压紧单元;所述工业机器人包括取料单元,取料单元拾取拆分后注塑件及流道,虽然该专利利用扭矩分离方式保护了注塑件的产品形状,避免注塑件因压力过大产生变形,但是仍然存在面对将螺栓实施拆分过程中难以同步去除的问题,从而影响了壳体批量拆分的效率,因此,在长期的研发测试过程中:现有技术中的拆分机器人在对工业设备组成的各个部件实施拆装过程中,难以将各尺寸规格的大型工业设备的各组装部件上的螺栓实施同步拆分,降低了工业设备的拆装作业效率的问题。
技术实现思路
1、有鉴于此,本发明的目的在于提出一种工业设备拆分机器人,以解决难以将各尺寸规格的大型工业设备的各组装部件上的螺栓实施同步拆分的问题。
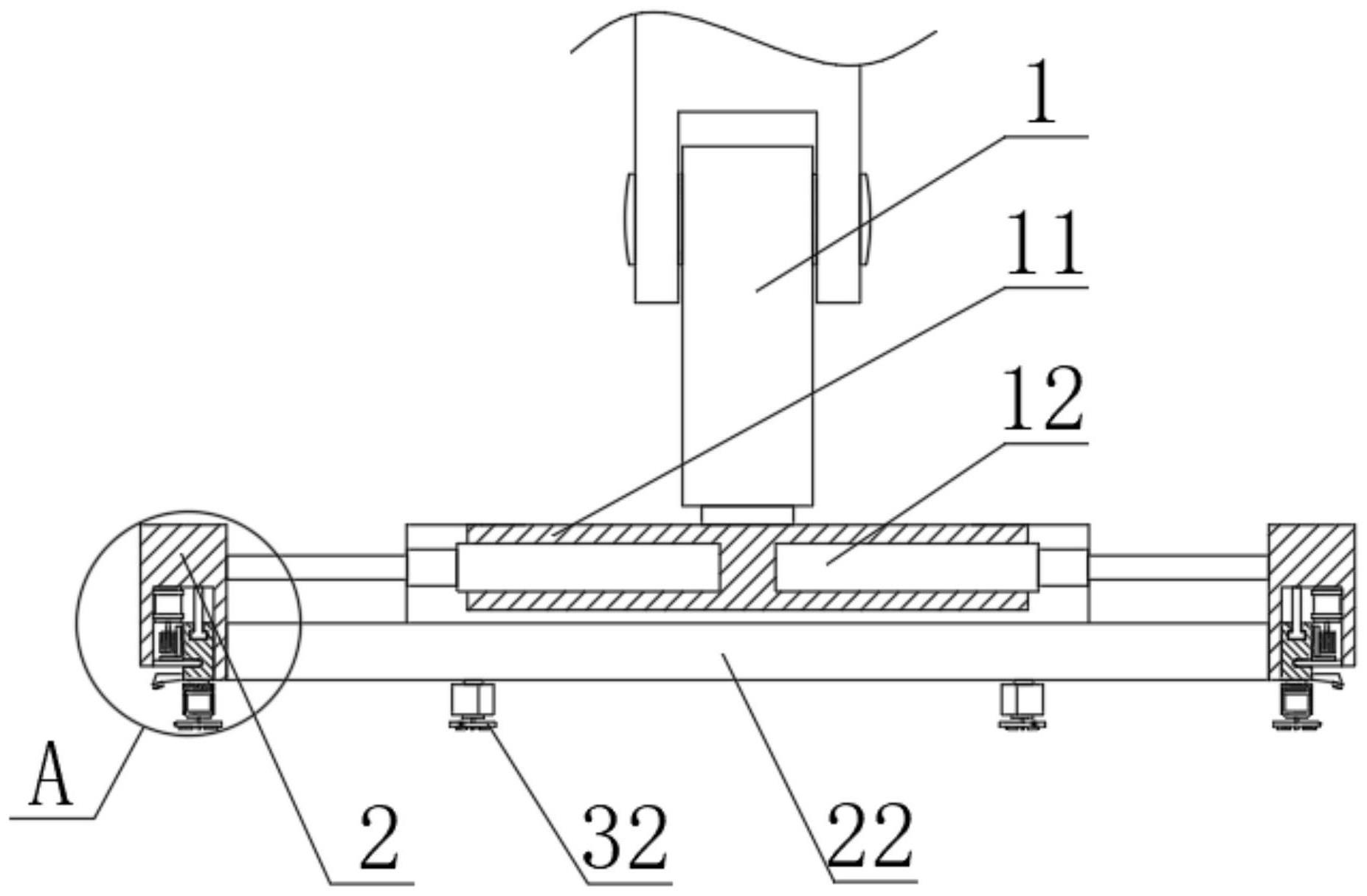
2、基于上述目的,本发明提供了一种工业设备拆分机器人,包括:六轴机械臂;还包括:圆台,固定安装于六轴机械臂的动力输出端,所述圆台外围四周固定安装有多个放射型位置排布的电动气缸;支撑座,固定安装于电动气缸的动力输出端,所述支撑座底部开设有开口,多个所述支撑座的开口内设置有弹性钢带,所述开口内设置有限位滑动组件,限位滑动组件用于限定弹性钢带在开口内的位置,所述开口顶部一侧固定安装有第一伺服马达,所述第一伺服马达动力输出端固定安装有滚轮,所述滚轮外围一侧贴合于弹性钢带外围一侧;多个第二伺服马达,可拆卸的设置于弹性钢带外围底部,所述第二伺服马达动力输出端固定安装有夹持组件;
3、其中,六轴机械臂驱动调整圆台至工业设备表面位置,通过电动气缸调整各个支撑座于工业设备表面安装螺丝的位置,并通过第一伺服马达驱动调节弹性钢带的位置,使得夹持组件移动至工业设备表面安装螺丝外围,通过同步驱动各个第二伺服马达带动夹持组件将工业设备表面安装螺丝实施同步拆分。
4、优选的,所述限位滑动组件包括:定位块,固定安装于开口顶部一侧,所述定位块外围底部延伸至弹性钢带内,位于弹性钢带内的定位块底部呈倒t型结构,倒t型结构的定位块与弹性钢带之间设置有多个滚珠。
5、优选的,所述限位滑动组件,还包括:插板,固定安装于开口内部一侧底端,所述弹性钢带靠近插板的一侧开设有供插板插入的定位槽,所述弹性钢带通过插板与定位槽贴合滑动于开口内部远离插板的一侧。
6、优选的,所述弹性钢带外围一侧上方固定设置有耐磨垫,所述滚轮外围开设有防滑纹,所述第一伺服马达驱动滚轮带动弹性钢带在多个开口内滑动。
7、优选的,所述耐磨垫为弹性材质的层状结构,所述耐磨垫外围开设有交叉排布的凹纹。
8、优选的,所述第二伺服马达外围顶部固定安装有吊座,所述吊座上方通过快拆组件连接于弹性钢带下方。
9、优选的,所述弹性钢带外围四周底端固定安装有多个延伸块,所述延伸块贴合设置于第二伺服马达的一侧,所述延伸块底部一端固定安装有红外测距传感器,所述红外测距传感器的检测方位延伸至夹持组件的下方。
10、优选的,所述电动气缸至少设置有六个,且任意相邻两个所述电动气缸之间的角度位置相同。
11、本发明的有益效果:通过电动气缸调整各个支撑座于工业设备表面安装螺丝的位置,并通过第一伺服马达驱动滚轮调节弹性钢带在开口中的位置,能够有效的收放调节可拆分的作业面积,使得夹持组件能够移动至各尺寸规格的工业设备表面安装螺丝外围并将螺丝实施夹紧,通过同步驱动各个第二伺服马达带动夹持组件实施转动,能够将工业设备表面安装螺丝实施同步拆分,有效的提升了大型工业设备各组装部件同步拆分的效率。
技术特征:
1.一种工业设备拆分机器人,包括:六轴机械臂(1);其特征在于,还包括:
2.根据权利要求1所述的一种工业设备拆分机器人,其特征在于,所述限位滑动组件包括:
3.根据权利要求2所述的一种工业设备拆分机器人,其特征在于,所述限位滑动组件,还包括:
4.根据权利要求1所述的一种工业设备拆分机器人,其特征在于,所述弹性钢带(22)外围一侧上方固定设置有耐磨垫(29),所述滚轮(28)外围开设有防滑纹,所述第一伺服马达(27)驱动滚轮(28)带动弹性钢带(22)在多个开口(21)内滑动。
5.根据权利要求4所述的一种工业设备拆分机器人,其特征在于,所述耐磨垫(29)为弹性材质的层状结构,所述耐磨垫(29)外围开设有交叉排布的凹纹。
6.根据权利要求1所述的一种工业设备拆分机器人,其特征在于,所述第二伺服马达(31)外围顶部固定安装有吊座(3),所述吊座(3)上方通过快拆组件连接于弹性钢带(22)下方。
7.根据权利要求1所述的一种工业设备拆分机器人,其特征在于,所述弹性钢带(22)外围四周底端固定安装有多个延伸块(33),所述延伸块(33)贴合设置于第二伺服马达(31)的一侧,所述延伸块(33)底部一端固定安装有红外测距传感器(34),所述红外测距传感器(34)的检测方位延伸至夹持组件(32)的下方。
8.根据权利要求1所述的一种工业设备拆分机器人,其特征在于,所述电动气缸(12)至少设置有六个,且任意相邻两个所述电动气缸(12)之间的角度位置相同。
技术总结
本发明涉及拆分机器人技术领域,具体涉及一种工业设备拆分机器人,包括六轴机械臂;还包括:支撑座,固定安装于电动气缸的动力输出端,所述开口顶部一侧固定安装有第一伺服马达;多个第二伺服马达,可拆卸的设置于弹性钢带外围底部,所述第二伺服马达动力输出端固定安装有夹持组件;通过电动气缸调整各个支撑座于工业设备表面安装螺丝的位置,并通过第一伺服马达驱动滚轮调节弹性钢带在开口中的位置,能够有效的收放调节可拆分的作业面积,使得夹持组件能够移动至各尺寸规格的工业设备表面安装螺丝外围并将螺丝实施夹紧,提升了大型工业设备各组装部件同步拆分的效率。
技术研发人员:王崎,杨裕才,黄争生
受保护的技术使用者:芜湖藦卡机器人科技有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!