一种用于晶圆搬运机器人的相对位姿校准方法及系统与流程
本发明涉及半导体制造,具体涉及一种用于晶圆搬运机器人的相对位姿校准方法及系统。
背景技术:
1、在半导体制造领域,由于每道工艺需要在不同设备完成,所以涉及晶圆搬运,一般使用晶圆搬运机器人,将晶圆在各设备间进行转运。搬运流程一般为:(1)晶圆搬运机器人从晶圆盒中取出晶圆,将晶圆放置在晶圆预校准系统上校准;(2)完成校准后,晶圆搬运机器人从晶圆校准系统上取出晶圆,放置在本道工艺所使用的设备中;(3)工艺完成后,晶圆机器人从本道工艺设备中取出晶圆,放置在晶圆预校准系统上校准;(4)校准完成后,晶圆机器人从晶圆校准系统上取出晶圆,放置在晶圆盒中。
2、可见,在晶圆搬运流程中,涉及多设备间的晶圆取放。由于晶圆盒放置的位置误差、晶圆搬运机器人结构参数随运行时间变化等原因,晶圆搬运机器人与各设备间,以及晶圆盒间的相对位置难免发生变化,从而导致晶圆搬运机器人无法精确地完成晶圆取放动作。为了让机器人的取放动作精度提升,需要每次传片时,晶圆与晶圆机器人的相对位姿进行校准。
3、现有技术一:一种多设备间配合偏差的检测系统(公开号为cn208189548u),公开了在晶圆工作台安装激光发射器,在晶圆搬运机器人上安装误差显示器,通过让激光发射器的光斑至误差显示器上,误差显示器显示激光点位置,进一步调整搬运机器人和晶圆工作台相对位置的误差,保证了晶圆在晶圆工作台上的位置精准。
4、现有技术二:晶圆处理机器人的自动校准(公开号为us6934606b1)公开了在传输设备上装配有多个激光位移传感器,用于设备与机器人之间的相对位姿校准。
5、目前的现有技术仍存在以下缺点:
6、1.主要是校准设备与机器人的相对位姿,并假定晶圆在设备中的位置是固定的,忽略了晶圆在搬运过程中,每个流程都会改变晶圆在设备中的位置。
7、2.需要在晶圆被搬运过程中确定晶圆中心位置,此时可能已经由于位置误差过大,发生事故。
8、3.无法对搬运的晶圆进行检测,有可能被搬运的晶圆不符合semi尺寸标准,而导致搬运事故。
技术实现思路
1、本发明的目的是提供一种用于晶圆搬运机器人的相对位姿校准方法及系统,在每次执行搬运动作时,对晶圆放置处的设备进行扫描,并将扫描后的激光点云进行拼接,完成扫描场景的三维重建。在完成三维重建后,识别、分割晶圆的点云簇,并最终确定晶圆在设备中的在位状态,以及晶圆与机械臂的相对位姿。
2、为实现上述目的,本发明提供了如下的技术方案:
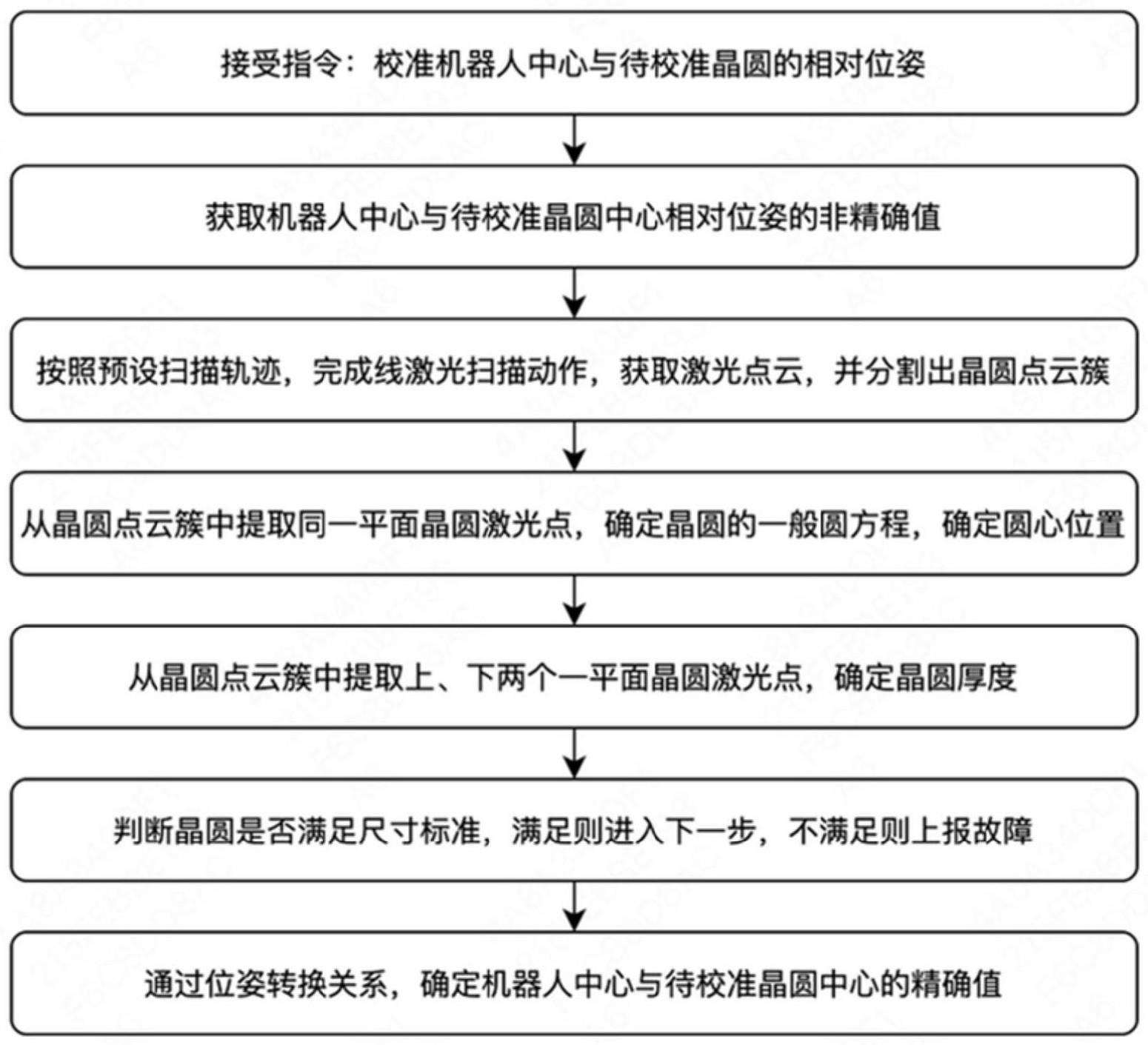
3、第一方面,本发明提供了一种用于晶圆搬运机器人的相对位姿校准方法,包括如下步骤:
4、s1.在机器人执行器末端安装线激光扫描仪,设机器人中心坐标系为s系,机器人末端执行器坐标系为p系,激光扫描仪中心坐标系为l系,晶圆中心坐标系为w系,晶圆中心w系与机器人中心s系的非精确相对位姿为
5、s2.机器人执行器末端带动线激光扫描仪根据预设路径运动,获取晶圆及晶圆放置设备的三维点云数据信息,并对三维点云进行聚类和分割,得到晶圆轮廓点云簇;
6、s3.基于步骤s2,取晶圆点云簇中位于同一水平面上的点,将该部分点的坐标带入到圆的一般方程(x-a)^2+(y-b)^2=r^2中,解出未知量a、b、r,即可知晶圆的中心位置(a,b),晶圆的半径r;
7、s4.基于步骤s3,分别提取晶圆上、下两个平面的点云簇,得出晶圆上、下两个平面的中心位置,即得出晶圆厚度h;
8、s5.基于步骤s3,晶圆中心w系与激光扫描仪l系的相对位姿为根据位姿转换关系,晶圆中心w系相对于机器人中心s系的精确位姿为
9、优选的,为了全面扫描晶圆及晶圆放置设备的三维数据,所述预设路径为绕晶圆垂直方向。
10、优选的,为了避免不符合标准的晶圆流入下游工艺,还包括如下步骤:得出晶圆半径r和晶圆厚度h后,判断当前晶圆是否满足尺寸标准,若不满足则上报故障。
11、第二方面,本发明提供了一种相对位姿校准系统,实现如第一方面中任一项所述的相对位姿校准方法,包括:
12、线激光扫描仪,所述线激光扫描仪布设于机器人末端执行器上,所述线激光扫描仪与机器人控制器电性连接;
13、机器人控制器,用于接收线激光扫描仪扫描得到的线激光数据,并完成三维重建过程;
14、计算机,用于对机器人控制器发送指令,控制机器人取、放晶圆。
15、优选的,为了保证数据传输的有效性,所述机器人控制器与计算机的连接方式为有线连接、无线连接中的一种或多种。
16、优选的,所述计算机还与其他设备电性连接,所述其他设备为load port、loadlock、工艺设备中的一种或多种。
17、本发明的有益效果是:
18、1)本发明直接确定晶圆中心与机器人中心的相对位姿,相比现有技术精度更高。
19、2)本发明在搬运前确定晶圆中心位置,降低了搬运事故率。
20、3)本发明在搬运前确定晶圆尺寸规格,避免不符合标准的晶圆流入下游工艺。
21、4)本发明降低了晶圆机器人在设备中的部署难度,节省了在多个设备上安装多个激光传感器的硬件成本。
技术特征:
1.一种用于晶圆搬运机器人的相对位姿校准方法,其特征在于,包括如下步骤:
2.根据权利要求1所述的一种用于晶圆搬运机器人的相对位姿校准方法,其特征在于:所述预设路径为绕晶圆垂直方向。
3.根据权利要求1所述的一种用于晶圆搬运机器人的相对位姿校准方法,其特征在于,还包括如下步骤:得出晶圆半径r和晶圆厚度h后,判断当前晶圆是否满足尺寸标准,若不满足则上报故障。
4.一种相对位姿校准系统,实现如权利要求1-3中任一项所述的相对位姿校准方法,其特征在于,包括:
5.根据权利要求4所述的一种相对位姿校准系统,其特征在于:所述机器人控制器与计算机的连接方式为有线连接、无线连接中的一种或多种。
6.根据权利要求4所述的一种相对位姿校准系统,其特征在于:所述计算机还与其他设备电性连接,所述其他设备为load port、load lock、工艺设备中的一种或多种。
技术总结
本发明涉及半导体制造技术领域,具体涉及一种用于晶圆搬运机器人的相对位姿校准方法及系统,包括如下步骤:获取机器人中心与待校准晶圆中心的非精确值,通过机器人执行末端的线激光扫描仪获取晶圆及晶圆放置设备的三维点云数据信息,得到晶圆轮廓点云簇;取晶圆点云簇中位于同一水平面上的点,求得晶圆的中心位置和晶圆的半径;分别提取晶圆上、下两个平面的点云簇,得出晶圆上、下两个平面的中心位置,即得出晶圆厚度;得出晶圆中心W系相对于机器人中心S系的精确位姿,本发明提高了相对位姿校准精确度,降低搬运事故。
技术研发人员:王清川,向星灿
受保护的技术使用者:苏州纳道精运半导体科技有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!