一种转动驱动装置、间隙调节方法及机器人关节与流程
本发明涉及间隙调节,尤其涉及一种转动驱动装置、间隙调节方法及机器人关节。
背景技术:
1、机器人关节是机器人设备中的重要部件,锥蜗轮蜗杆减速器在机器人关节中有着广泛的应用,但蜗杆蜗轮运行一段时间后会出现磨损,蜗轮和蜗杆之间会产生间隙,导致机器人关节负载端晃动,因此蜗轮蜗杆的间隙的消除尤为重要。
2、目前,蜗轮蜗杆一般通过调整锥蜗杆的轴向运动来消除间隙,容易使蜗轮和蜗杆的运动副由面跟面接触的低幅变成点跟面或线跟面的高幅,虽然间隙消除了但其变得更不耐磨。
技术实现思路
1、本发明的目的在于提供一种转动驱动装置、间隙调节方法及机器人关节,用于不产生高副运动的前提下,消除蜗轮和蜗杆之间的间隙。
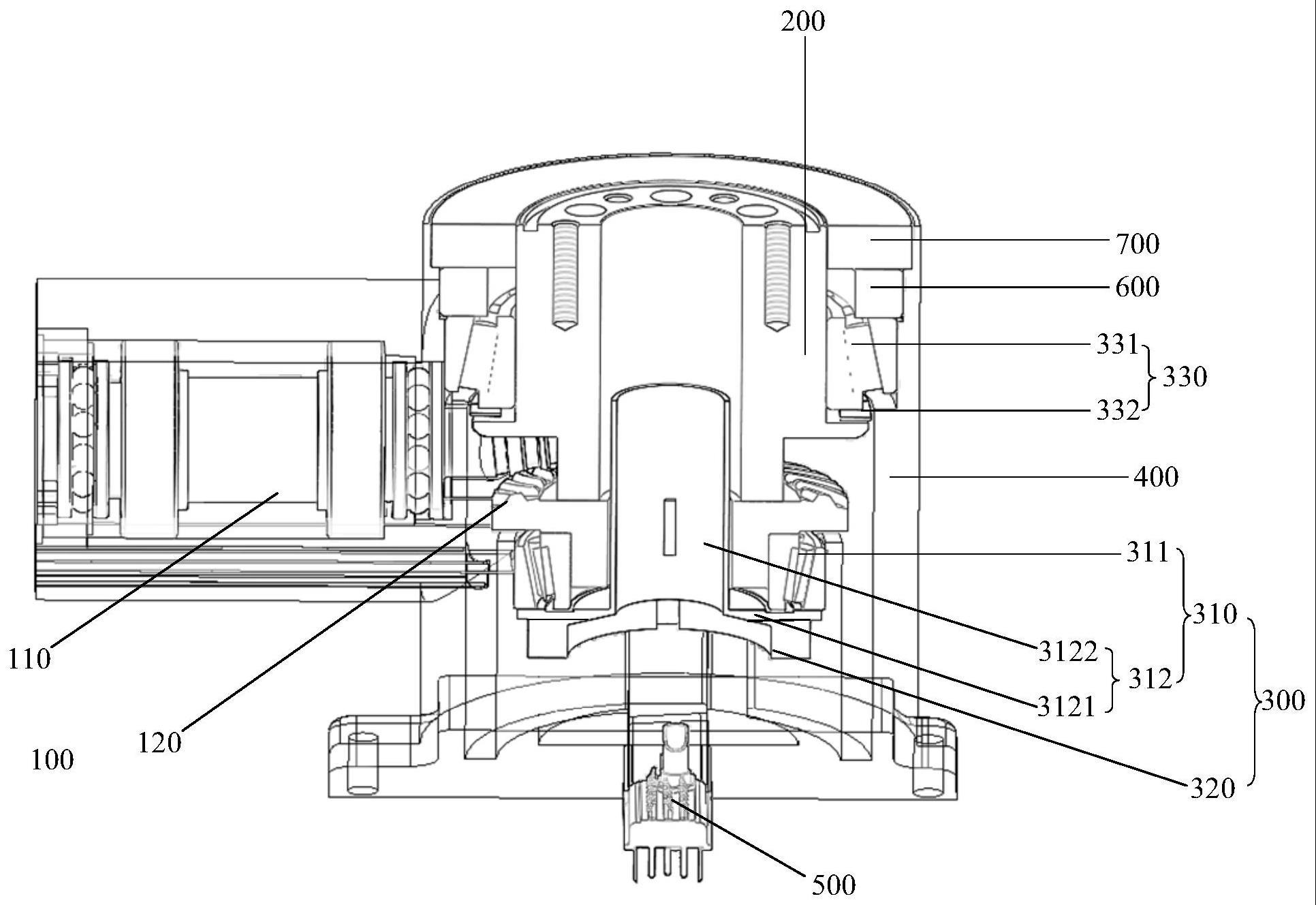
2、第一方面,本发明实施例提供了一种转动驱动装置,包括:蜗轮蜗杆驱动机构、扭矩输出件以及间隙调整组件,所述间隙调整组件包括支撑组件以及消隙推进件,所述蜗轮蜗杆机构含有的蜗轮与蜗杆之间具有间隙,所述扭矩输出件设在所述蜗轮蜗杆机构含有的蜗轮上,所述支撑组件设在所述蜗轮背离所述扭矩输出件的端面,所述蜗轮蜗杆机构含有的蜗杆位于所述蜗轮靠近所述扭矩输出件的端面,所述消隙推进件设在所述支撑组件背离所述蜗轮的端面。
3、与现有技术相比,本发明实施例提供的转动驱动装置包括蜗轮蜗杆驱动机构、扭矩输出件以及间隙调整组件,间隙调整组件包括支撑组件以及消隙推进件,蜗轮蜗杆机构含有的蜗轮与蜗杆之间具有间隙。当蜗轮蜗杆机构含有的涡杆开始转动时,可以带动蜗轮进行转动,由于扭矩输出件设在蜗轮蜗杆机构含有的蜗轮上,因此,蜗轮转动时可以带动扭矩输出件进行转动,扭矩输出件可以带动与其连接的机器人关节臂进行转动。同时,支撑组件设在蜗轮背离扭矩输出件的端面,蜗轮蜗杆机构含有的蜗杆位于蜗轮靠近所述扭矩输出件的端面,消隙推进件设在支撑组件背离蜗轮的端面。因此,可以通过旋转或者推进消隙推进件使其产生推力使得支撑组件向上运动,从而带动蜗轮向上移动,缩小了蜗轮的中心距到蜗杆的中心距的距离,进而可以消除蜗轮和蜗杆之间的间隙。
4、由上可见,本发明实施例提供的转动驱动装置,可以消除蜗轮和蜗杆之间的间隙。
5、第二方面,本发明实施例还提供一种间隙调节方法,应用于第一方面所述的转动驱动装置。
6、与现有技术相比,本发明提供的间隙调节方法的有益效果与上述第一方面所述的转动驱动装置的有益效果相同,此处不做赘述。
7、第三方面,本发明实施例还提供一种机器人关节,包括第一方面所述的转动驱动装置。
8、与现有技术相比,本发明提供的机器人关节的有益效果与上述第一方面所述的转动驱动装置的有益效果相同,此处不做赘述。
技术特征:
1.一种转动驱动装置,其特征在于,包括:蜗轮蜗杆驱动机构、扭矩输出件以及间隙调整组件,所述间隙调整组件包括支撑组件以及消隙推进件,所述蜗轮蜗杆机构含有的蜗轮与蜗杆之间具有间隙,所述扭矩输出件设在所述蜗轮上,所述支撑组件设在所述蜗轮背离所述扭矩输出件的端面,所述蜗轮蜗杆机构含有的蜗杆位于所述蜗轮靠近所述扭矩输出件的端面,所述消隙推进件设在所述支撑组件背离所述蜗轮的端面。
2.根据权利要求1所述的转动驱动装置,其特征在于,所述支撑组件包括第一轴承以及支撑件,所述第一轴承与所述蜗轮连接,所述支撑件背离所述蜗轮的端面与所述消隙推进件连接。
3.根据权利要求2所述的转动驱动装置,其特征在于,所述扭矩输出件为空心扭矩输出件,所述支撑件包括抵接段以及与所述抵接段连接的套接段,所述套接段伸入所述空心扭矩输出件的空心部,所述抵接段设在所述蜗轮背离所述扭矩输出件的端面。
4.根据权利要求1所述的转动驱动装置,其特征在于,所述间隙调整组件还包括弹性调节组件,所述弹性调节组件环设在所述扭矩输出件上。
5.根据权利要求4所述的转动驱动装置,其特征在于,所述扭矩输出件具有环形安装部,所述弹性调节组件环设在所述环形安装部上,所述蜗杆位于所述蜗轮和所述环形安装部之间。
6.根据权利要求4所述的转动驱动装置,其特征在于,所述弹性调节组件包括第二轴承以及弹性调节件,所述弹性调节件和所述第二轴承沿着靠近所述扭矩输出件的输出端方向设在所述扭矩输出件上。
7.根据权利要求6所述的转动驱动装置,其特征在于,所述转动驱动装置还包括刚性压紧件,所述刚性压紧件环设在所述扭矩输出件上,所述第二轴承位于所述刚性压紧件和所述弹性调节件之间。
8.根据权利要求4~7任一项所述的转动驱动装置,其特征在于,所述机器人关节还包括设在所述扭矩输出件上的防水密封件,所述防水密封件位于所述弹性调节组件靠近所述扭矩输出件的输出端的一侧。
9.根据权利要求1~7任一项所述的转动驱动装置,其特征在于,所述消隙推进件为设在所述支撑组件背离所述蜗轮的端面的螺纹调节件,所述机器人关节还包括驱动机构,所述驱动机构与蜗轮蜗杆机构含有的蜗杆连接。
10.一种间隙调节方法,其特征在于,应用于权利要求1~9任一项所述转动驱动装置,所述方法包括:
11.一种机器人关节,其特征在于,包括权利要求1~9任一项所述的转动驱动装置。
技术总结
本发明公开一种转动驱动装置、间隙调节方法及机器人关节,涉及间隙调节技术领域,以解决现有的蜗轮蜗杆产生间隙时导致机器人关节负载端晃动的问题。该转动驱动装置包括蜗轮蜗杆驱动机构、扭矩输出件以及间隙调整组件,间隙调整组件包括支撑组件以及消隙推进件,扭矩输出件设在蜗轮蜗杆机构含有的蜗轮上,支撑组件设在蜗轮背离扭矩输出件的端面,蜗轮蜗杆机构含有的蜗杆位于蜗轮靠近所述扭矩输出件的端面,消隙推进件设在支撑组件背离蜗轮的端面。该机器人包括该机器人关节。本发明提供的机器人关节和机器人用于在不产生高副运动的前提下,消除蜗轮和蜗杆之间的间隙。
技术研发人员:赵成斌,郁肖飞,沈志航,王芳,王宁宁,朱立君,郭文慧,段俊杰,邢佳伟
受保护的技术使用者:航天科工智能机器人有限责任公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!