一种钻入地下的机器人及控制系统
本发明属于机器人,具体涉及一种钻入地下的机器人及控制系统。
背景技术:
1、由于未爆弹药特别是战后遗留的各类弹药,具有长期潜伏性及高度危险性,经常因人员触碰或在外界环境的作用下,发生未爆弹爆炸产生的意外伤害事件,威胁人民生命安全,成为当今社会的一大危害。
2、炸毁未爆弹的一般操作方法是在弹体旁边堆积放置起爆药包或药块的土台,土台一般依未爆弹在地面上的姿态,按照有利于殉爆的原则设置,起爆药包(药块)放置于土台上或近旁,紧靠弹药,安装雷管,起爆作用方向对准弹药易于起爆端,采用电力法或火力法起爆雷管,引爆炸药,通过殉爆使弹药彻底炸毁。
3、现有的用于钻入地下的未爆弹处置的机器人大都只具备单一功能,大多是探测或挖掘等功能,缺少集成处理拆除未爆弹的机器人。
技术实现思路
1、本发明的目的在于提供一种钻入地下的机器人,以解决现有技术中未爆弹的拆除复杂、没有将机器人的钻进地下与未爆弹拆除结合技术问题。
2、为实现上述目的,本发明提供如下技术方案:
3、第一方面,本发明提供了一种钻入地下的机器人,包括车体,车体端部连接有柔性机械臂,车体还连接有用于对柔性机械臂导向运动的导向机构;
4、所述导向机构包括折叠臂,所述折叠臂端部连接有连接头,所述连接头连接有导向架,所述导向架设置有用于连接固定的固定杆,所述导向架及固定杆连接有至少两组导向轮组件,两组所述导向轮组件设置有容纳柔性机械臂贯穿导向的导流通道。
5、设置导向机构形成导流通道实现柔性机械臂可以沿导流通道导出,且导流机构包括两组导向轮组件实现柔性机械臂的夹持导向。
6、可选的,所述车体端部设置有绞盘分离机构,所述绞盘分离机构连接有用以绕设柔性机械臂的绞盘,所述绞盘分离机构包括绞盘架及传动杆,所述传动杆贯穿绞盘架端部设置有若干个锁轮,所述车体与绞盘分离机构连接端设置有与锁轮相适配的锁孔。
7、通过设置绞盘分离机构实现带动柔性机械臂与车体分离后进行未爆弹的拆除,通过设置传动杆带动锁轮转动,实现锁轮脱离锁孔位置,从而实现绞盘及柔性机械臂的分离。
8、可选的,所述柔性机械臂前进探测端设置有空心钻头,所述柔性机械臂固定端设置有机械臂分离机构与绞盘连接,所述空心钻头呈前端口径大后端口径小螺旋结构。
9、可选的,所述空心钻头内部设置有聚能销毁器,所述空心钻头后端连接有驱动轮,所述驱动轮为柔性螺旋结构。
10、可选的,所述机械臂分离机构包括连接盘及固定盘,所述连接盘连接柔性机械臂,所述固定盘与绞盘连接,所述连接盘阵列设置有若干个固定块,所述固定盘对应固定块上的螺纹孔设置相适配的连接螺栓,所述连接螺栓的端部设置有用于夹持及调节的齿轮,通过设置固定盘及连接螺栓,每个连接螺栓均设置有齿轮,通过齿轮带动连接螺栓转动实现与连接盘的分离。
11、可选的,所述导向机构中导向架对称设置为一对,一对所述导向架对应连接两组导向轮组件,每组导向轮组件包括主动轮及从动轮,所述连接固定杆连接主动轮或从动轮以构成的三点夹持的导流通道。
12、可选的,每组所述导向轮组件包括一个主动轮及两个从动轮,每组所述主动轮及从动轮在水平方向上错位设置,且所述主动轮及从动轮的转动圆周面设置内凹状。
13、可选的,所述车体还设置有夹持机构,所述夹持机构包括夹持臂及夹头,所述夹持臂一端连接液压机构、另一端与夹头连接,所述夹头设置为抓手状结构。
14、上述方案中,通过设置主动轮及从动轮构成三点夹持的导流通道,实现带动柔性机械臂的移动,且通过设置夹头及加持臂实现对柔性机械臂的夹持控制移动。
15、第二方面,本发明还提供了一种根据第一方面所述的一种钻入地下的机器人的控制系统,其特征在于,包括:
16、信息采集模块:用于获取机器人运动数据;
17、信息传输模块:用于传输机器人运动数据;
18、控制模块:用于对机器人发起控制指令。
19、可选的;
20、所述信息采集模块包括:
21、机器人位置获取单元:用于获取机器人当前位置信息;
22、目标地点位置获取单元:用于获取机器人目标地位置信息;
23、所述控制模块包括:
24、移动单元:用于控制机器人的移动;
25、动作单元:用于控制聚能销毁器动作;
26、绞盘分离机构动作单元:用于控制绞盘分离机构动作;
27、机械臂分离机构动作单元:用于控制柔性机械臂分离动作。
28、本发明的有益效果和优点:
29、该钻入地下的机器人通过设置导向机构形成导流通道实现柔性机械臂可以沿导流通道导出,且导流机构包括两组导向轮组件实现柔性机械臂的夹持导向,通过设置在柔性机械臂中设置空心钻头及驱动轮带动柔性机械臂的运动,通过在空心钻头中设置聚能销毁器实现未爆弹的销毁,通过设置绞盘分离机构实现绞盘带动柔性机械臂与车体的分离,通过设置机械臂分离机构实现机械臂与绞盘的分离,设置两道分离机构,减少无法分离情况发生的可能性,通过设置车体及系统实现无人远程控制未爆弹的拆除,提搞安全性。
技术特征:
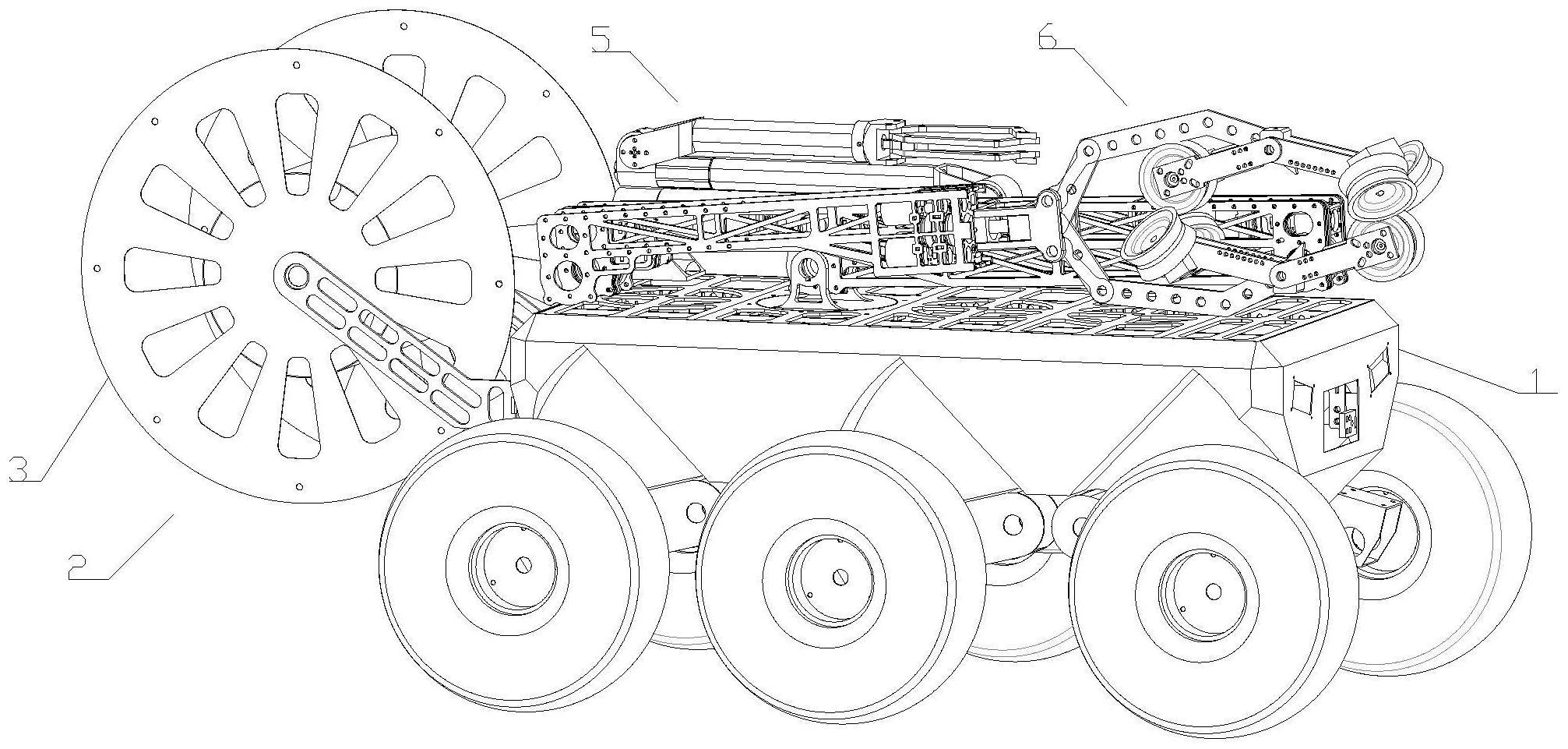
1.一种钻入地下的机器人,其特征在于:包括车体,车体端部连接有柔性机械臂(4),车体还连接有用于对柔性机械臂(4)导向运动的导向机构(6);
2.根据权利要求1所述的一种钻入地下的机器人,其特征在于:所述车体端部设置有绞盘分离机构(2),所述绞盘分离机构(2)连接有用以绕设柔性机械臂(4)的绞盘(3),所述绞盘分离机构(2)包括绞盘架(21)及传动杆(22),所述传动杆(22)贯穿绞盘架(21)端部设置有若干个锁轮(23),所述车体与绞盘分离机构(2)连接端设置有与锁轮(23)相适配的锁孔。
3.根据权利要求2所述的一种钻入地下的机器人,其特征在于:所述柔性机械臂(4)前进探测端设置有空心钻头(41),所述柔性机械臂(4)固定端设置有机械臂分离机构与绞盘(3)连接,所述空心钻头(41)呈前端口径大后端口径小螺旋结构。
4.根据权利要求3所述的一种钻入地下的机器人,其特征在于:所述空心钻头(41)内部设置有聚能销毁器,所述空心钻头(41)后端连接有驱动轮(42),所述驱动轮(42)为柔性螺旋结构。
5.根据权利要求4所述的一种钻入地下的机器人,其特征在于:所述机械臂分离机构包括连接盘(43)及固定盘(44),所述连接盘(43)连接柔性机械臂(4),所述固定盘(44)与绞盘(3)连接,所述连接盘(43)阵列设置有若干个固定块(45),所述固定盘(44)对应固定块(45)上的螺纹孔设置相适配的连接螺栓(46),所述连接螺栓(46)的端部设置有用于夹持及调节的齿轮(47)。
6.根据权利要求1或5所述的一种钻入地下的机器人,其特征在于:所述导向机构(6)中导向架(63)对称设置为一对,一对所述导向架(63)对应连接两组导向轮组件,每组导向轮组件包括主动轮(65)及从动轮(66),所述连接固定杆(64)连接主动轮(65)或从动轮(66)以构成的三点夹持的导流通道(67)。
7.根据权利要求6所述的一种钻入地下的机器人,其特征在于:每组所述导向轮组件包括一个主动轮(65)及两个从动轮(66),每组所述主动轮(65)及从动轮(66)在水平方向上错位设置,且所述主动轮(65)及从动轮(66)的转动圆周面设置内凹状。
8.根据权利要求7所述的一种钻入地下的机器人,其特征在于:所述车体还设置有夹持机构(5),所述夹持机构(5)包括夹持臂(51)及夹头(52),所述夹持臂(51)一端连接液压机构、另一端与夹头(52)连接,所述夹头(52)设置为抓手状结构。
9.一种根据权利要求1-8任一项所述的一种钻入地下的机器人的控制系统,其特征在于,包括:
10.根据权利要求9所述的一种钻入地下的机器人的控制系统,其特征在于:
技术总结
本发明公开了一种钻入地下的机器人及控制系统,机器人包括车体,车体端部连接有柔性机械臂,车体还连接有用于对柔性机械臂导向运动的导向机构;所述导向机构包括折叠臂,所述折叠臂端部连接有连接头,所述连接头连接有导向架,所述导向架设置有用于连接固定的固定杆,所述导向架及固定杆连接有至少两组导向轮组件,两组所述导向轮组件设置有容纳柔性机械臂贯穿导向的导流通道,本发明通过设置导向机构形成导流通道实现柔性机械臂可以沿导流通道导出,且导流机构包括两组导向轮组件实现柔性机械臂的夹持导向,通过设置在柔性机械臂中设置空心钻头及驱动轮带动柔性机械臂的运动,通过在空心钻头中设置聚能销毁器实现未爆弹的销毁。
技术研发人员:张胜,高振儒,李裕春,黄骏逸,杨力,武双章,赵云凯,赵杰,丁文,陈勇,吴家祥
受保护的技术使用者:中国人民解放军陆军工程大学
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!