一种轻型上肢外骨骼机器人的制作方法
本发明涉及机器人领域,特别涉及一种轻型上肢外骨骼机器人。
背景技术:
1、近年来,越来越多的人致力于寻找在工业装配和物流任务中防止和减少肌肉骨骼损伤的方法和设备。搬运重物,将手臂保持在头部上方的位置持续施力和重负荷的重复操作,都会增加施力者关节和肌肉损伤的可能。因此,可穿戴式的主动外骨骼,在协助重体力劳动者减轻他们的负担,如物流行业,建筑行业,军事行业,医疗行业等具有较好的前景。
2、现有的外骨骼主要存在着重量大,不够灵活,或自由度过多等问题。在穿戴者穿上外骨骼机器人后,外骨骼机器人的机械结构阻碍了穿戴者运动,或是无法贴合穿戴者实际的运动。
技术实现思路
1、本发明的目的在于提供一种轻型上肢外骨骼机器人,实现了在保证穿戴者的舒适性前提下,提供额外的力量。
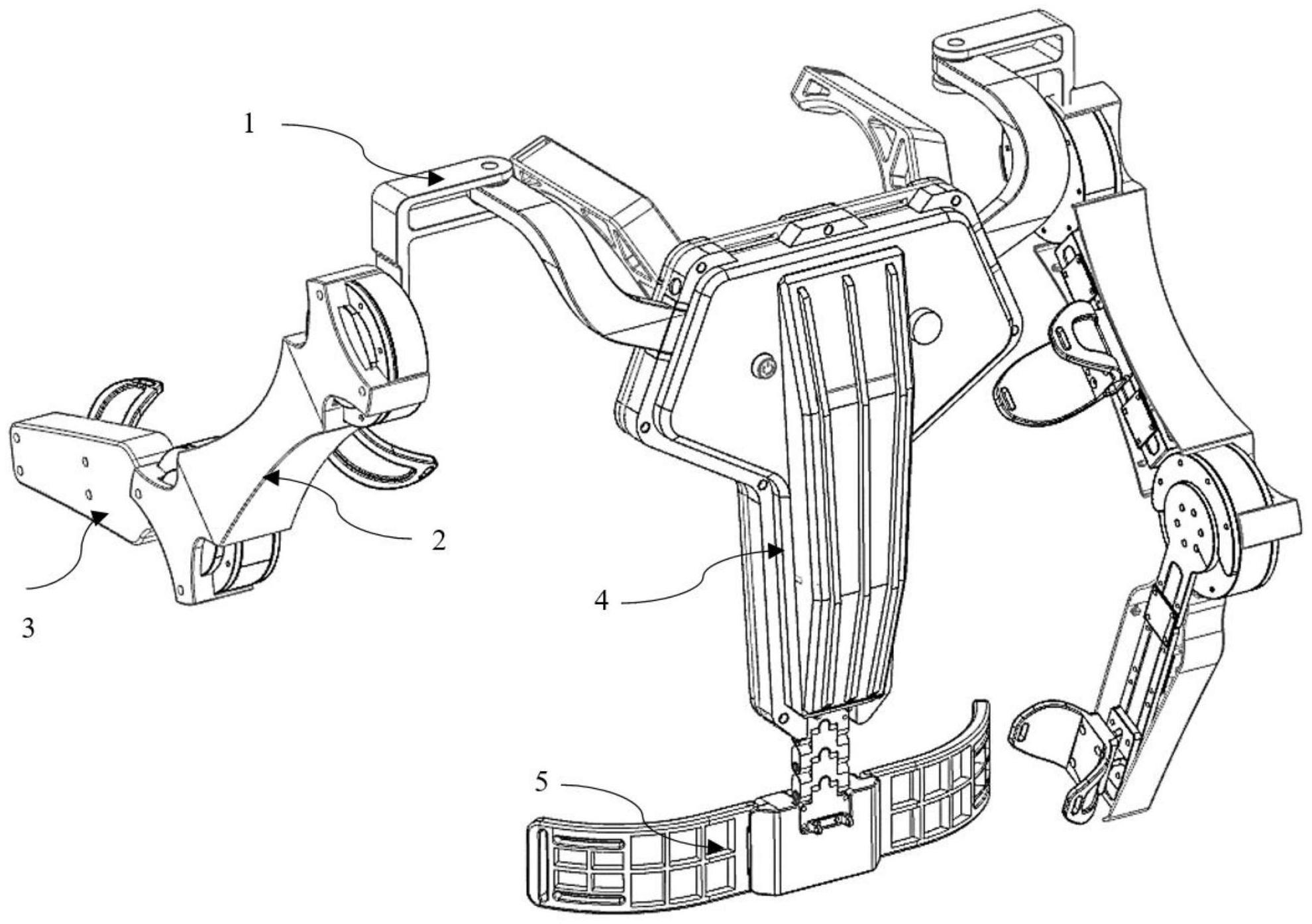
2、为了实现上述目的,本发明提供如下技术方案:一种轻型上肢外骨骼机器人,包括:背部组件,所述背部组件能够固定于人体的背部;肩部组件和手臂组件,所述肩部组件与所述背部组件连接,所述手臂组件与所述肩部组件连接;其中,所述肩部组件能够相对于所述背部组件转动,所述手臂组件能够相对于所述肩部组件转动,且所述肩部组件的转动方向和所述手臂组件的转动方向相垂直。
3、进一步地,所述肩部组件的数量为2个,2个所述肩部组件对称设于所述背部组件的两侧,所述肩部组件包括:肩关节连接件和电机连接件;所述肩关节连接件的一端通过肩部连接件与所述背部组件连接,且所述肩关节连接件向垂直于所述背部组件的方向延伸;所述电机连接件的一端设有铰接部,所述电机连接件通过所述铰接部与所述肩关节连接件铰接,所述电机连接件的另一端与所述手臂组件连接。
4、进一步地,所述手臂组件包括上臂组件和下臂组件,所述下臂组件的一端与所述上臂组件的一端连接;所述上臂组件包括第一电机、第一连接件、上臂调节片和第一连接板,所述第一电机的一端与所述电机连接件连接,所述第一电机的另一端通过所述第一连接件与所述第一连接板的一端连接,所述第一连接板的另一端与所述上臂调节片的一端连接。
5、进一步地,所述下臂组件包括第二电机、第二连接件、第三连接件和下臂调节片;所述第二连接件的一端与所述上臂调节片的另一端连接,所述第二连接件的另一端与所述第二电机的一端连接,所述第二电机的另一端通过所述第三连接件与所述下臂调节片连接。
6、进一步地,所述上臂组件还包括上臂绑缚,所述下臂组件还包括下臂绑缚;所述上壁绑缚设于所述上臂调节片上,所述下臂组件设于所述下壁调节片上。
7、进一步地,所述上臂组件还包括上臂外壳和imu传感器,所述上臂外壳与所述第一电机连接,所述第一连接件、所述上臂调节片和所述第一连接板均位于上臂外壳内,所述imu传感器与所述上臂调节片连接,所述imu传感器能够监测所述上臂调节片的位姿。
8、进一步地,所述下臂组件还包括下臂外壳和限位件,所述下臂外壳与所述第二电机连接,所述第二连接件、第三连接件和下臂调节片均位于所述下臂外壳内。
9、进一步地,所述背部组件包括肩架、海绵、背板、电池、主控板和背部外壳;所述肩架的数量为2个,2个所述肩架对称设于所述背板上,所述肩架向远离所述背板的方向延伸,且所述肩架的延伸方向与所述肩关节连接件的延伸方向相同;所述背板上设有空槽,所述电池设于所述空槽内,所述背板上还设有充电插头,所述充电插头与所述电池连接;所述海绵设于所述背板的一侧,所述背部外壳设于所述背板的另一侧;所述背部外壳上设有自锁开关,所述自锁开关与所述电池连接;所述主控板与所述第一电机、所述第二电机、所述imu传感器和所述电池连接。
10、进一步地,还包括腰部组件,所述腰部组件与所述背部组件连接,所述腰部组件能够固定于人体的腰部。
11、进一步地,所述腰部组件包括:腰椎头、腰椎中、腰椎尾、腰椎轴、脊柱复位件、腰带绑座和腰带片;所述腰椎头、所述腰椎中、所述腰椎尾和所述腰带片顺序连接,所述腰椎头能够相对于所述腰椎中转动,所述腰椎中能够相对于所述腰椎尾转动,且所述腰椎头和所述腰椎中之间、所述腰椎中和所述腰椎尾之间均通过一个所述腰椎轴连接;所述腰带绑座的数量为2个,2个所述腰带绑座对称设于所述腰带片的两侧,所述腰带绑座上设有开口;所述腰椎头和腰椎尾上均设有所述脊柱复位件,两个所述脊柱复位件之间设有弹簧。
12、分析可知,本发明公开一种轻型上肢外骨骼机器人,本发明能够保证结构强度的同时减轻整体重量;并且确保各机械自由度活动范围满足人体活动需求,不会干涉人体运动,结构强度高,穿戴舒适,并且稳定性强。
技术特征:
1.一种轻型上肢外骨骼机器人,其特征在于,包括:
2.根据权利要求1所述的一种轻型上肢外骨骼机器人,其特征在于,所述肩部组件的数量为2个,2个所述肩部组件对称设于所述背部组件的两侧,所述肩部组件包括:肩关节连接件和电机连接件;
3.根据权利要求2所述的一种轻型上肢外骨骼机器人,其特征在于,所述手臂组件包括上臂组件和下臂组件,所述下臂组件的一端与所述上臂组件的一端连接;
4.根据权利要求3所述的一种轻型上肢外骨骼机器人,其特征在于,所述下臂组件包括第二电机、第二连接件、第三连接件和下臂调节片;
5.根据权利要求4所述的一种轻型上肢外骨骼机器人,其特征在于,所述上臂组件还包括上臂绑缚,所述下臂组件还包括下臂绑缚;
6.根据权利要求4所述的一种轻型上肢外骨骼机器人,其特征在于,所述上臂组件还包括上臂外壳和imu传感器,所述上臂外壳与所述第一电机连接,所述第一连接件、所述上臂调节片和所述第一连接板均位于上臂外壳内,所述imu传感器与所述上臂调节片连接,所述imu传感器能够监测所述上臂调节片的位姿。
7.根据权利要求4所述的一种轻型上肢外骨骼机器人,其特征在于,所述下臂组件还包括下臂外壳和限位件,所述下臂外壳与所述第二电机连接,所述第二连接件、第三连接件和下臂调节片均位于所述下臂外壳内。
8.根据权利要求6所述的一种轻型上肢外骨骼机器人,其特征在于,所述背部组件包括肩架、海绵、背板、电池、主控板和背部外壳;
9.根据权利要求2所述的一种轻型上肢外骨骼机器人,其特征在于,还包括腰部组件,所述腰部组件与所述背部组件连接,所述腰部组件能够固定于人体的腰部。
10.根据权利要求9所述的一种轻型上肢外骨骼机器人,其特征在于,所述腰部组件包括:腰椎头、腰椎中、腰椎尾、腰椎轴、脊柱复位件、腰带绑座和腰带片;
技术总结
本发明提供一种轻型上肢外骨骼机器人,包括:背部组件,所述背部组件能够固定于人体的背部;肩部组件和手臂组件,所述肩部组件与所述背部组件连接,所述手臂组件与所述肩部组件连接;其中,所述肩部组件能够相对于所述背部组件转动,所述手臂组件能够相对于所述肩部组件转动,且所述肩部组件的转动方向和所述手臂组件的转动方向相垂直。
技术研发人员:曹文洁,芮岳峰,陈浩,黄显道,毛政中,张嘉梁,张楠,李瑞珍,王春雷
受保护的技术使用者:上海微电机研究所(中国电子科技集团公司第二十一研究所)
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!