带有状态受限的多单臂机械手分布式协同控制方法及系统
本公开涉及机械手控制相关,具体地说,是涉及一种带有状态受限的多单臂机械手分布式协同控制方法及系统。
背景技术:
1、本部分的陈述仅仅是提供了与本公开相关的背景技术信息,并不必然构成在先技术。
2、机械手是机器人技术领域中应用最广泛的自动化机械装置,更是智能制造生产过程中的核心装备。由于单机械手无法满足日益复杂的制造任务需求,可以执行更加复杂的任务的多机械手系统在智能制造过程中扮演越来越重要的角色。同单机械手相比,多机械手系统更为复杂,并且协同控制理论的研究较为薄弱。因此,多单臂机械手系统的协同一致性控制是一个具有挑战性的问题。
3、最优控制可以在保证被控系统稳定的基础上优化系统性能。然而对于单臂机械手来说,这类复杂非线性系统的最优控制问题求解十分困难。此外,为了确保机械手运行安全,机械手的状态变量需要满足外部环境的受限要求。违反约束条件将导致系统性能下降,甚至破坏被控系统。发明人发现,目前的多单臂机械手协同一致性优化控制困难,在不违反状态约束的同时使性能指标得到优化,是目前尚未解决的技术问题。
技术实现思路
1、本公开为了解决上述问题,提出了一种带有状态受限的多单臂机械手分布式协同控制方法及系统,将系统控制问题转化为无约束跟踪问题,能够在不违反状态约束的同时使性能指标得到优化。
2、为了实现上述目的,本公开采用如下技术方案:
3、一个或多个实施例提供了带有状态受限的多单臂机械手分布式协同控制方法,包括如下步骤:
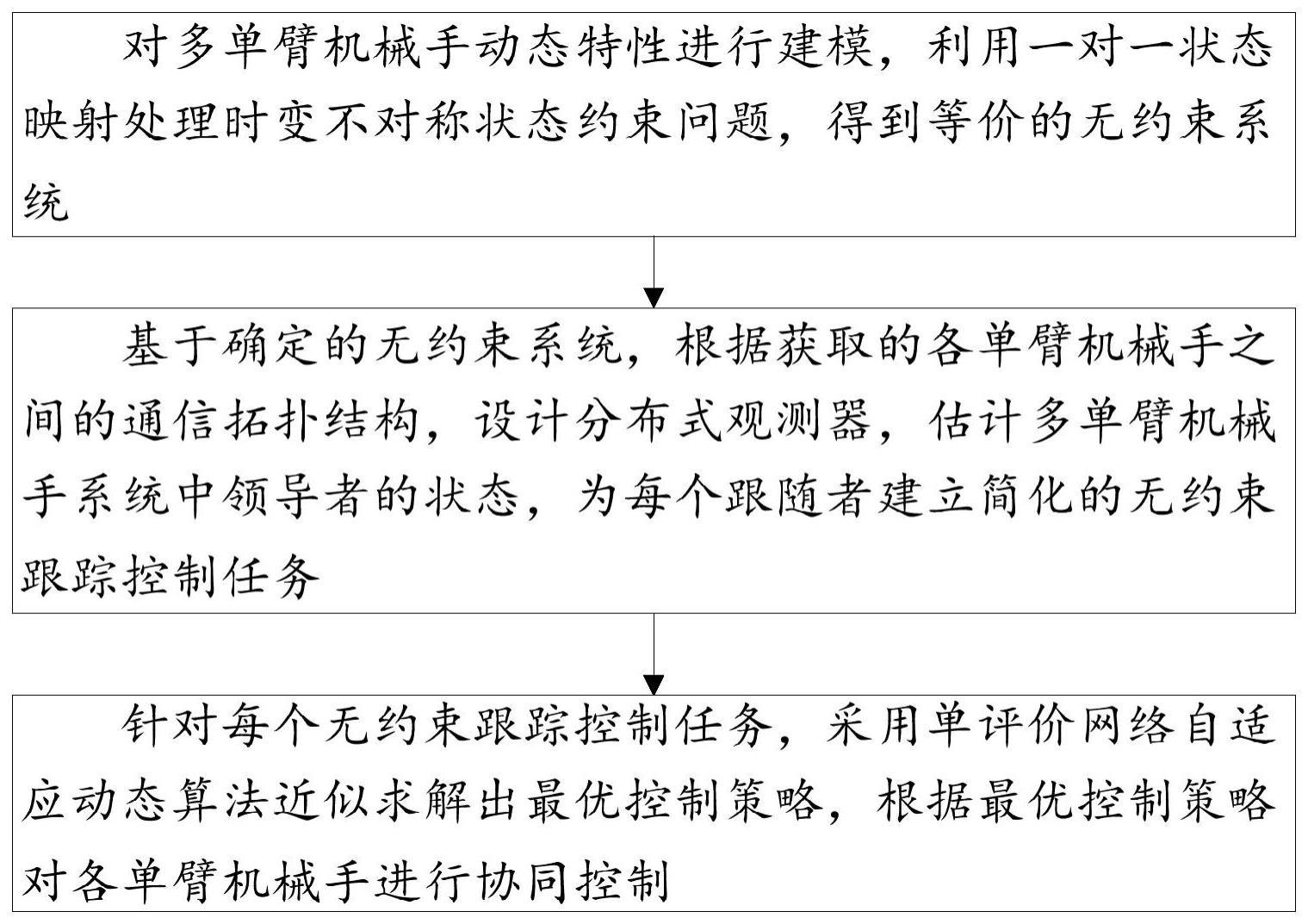
4、对多单臂机械手动态特性进行建模,利用一对一状态映射处理时变不对称状态约束问题,得到等价的无约束系统;
5、基于确定的无约束系统,根据获取的各单臂机械手之间的通信拓扑结构,设计分布式观测器,估计多单臂机械手系统中领导者的状态,为每个跟随者建立简化的无约束跟踪控制任务;
6、针对每个无约束跟踪控制任务,采用单评价网络自适应动态算法近似求解出最优控制策略,根据最优控制策略对各单臂机械手进行协同控制。
7、一个或多个实施例提供了带有状态受限的多单臂机械手分布式协同控制系统,包括:
8、映射转换模块:被配置为对多单臂机械手动态特性进行建模,利用一对一状态映射处理时变不对称状态约束问题,得到等价的无约束系统;
9、无约束跟踪控制任务建立模块:被配置为基于确定的无约束系统,根据获取的各单臂机械手之间的通信拓扑结构,设计分布式观测器,估计多单臂机械手系统中领导者的状态,为每个跟随者建立简化的无约束跟踪控制任务;
10、求解模块:被配置为用于针对每个无约束跟踪控制任务,采用单评价网络自适应动态算法近似求解出最优控制策略,根据最优控制策略对各单臂机械手进行协同控制。
11、一种电子设备,包括存储器和处理器以及存储在存储器上并在处理器上运行的计算机指令,所述计算机指令被处理器运行时,完成上述方法所述的步骤。
12、一种计算机可读存储介质,用于存储计算机指令,所述计算机指令被处理器执行时,完成上述方法所述的步骤。
13、与现有技术相比,本公开的有益效果为:
14、本公开中,通过非线性映射函数的系统变换和分布式观测器的协同设计,将状态约束下的协同控制问题转化为传统的无约束跟踪问题。此外,所考虑的输出约束是不对称和时变的,满足更一般的约束范围。与现有的基于执行与评价的自适应动态规划算法不同,本实施例只需要一个评价网络,消除了执行网络的逼近误差,算法实现结构更简单。
15、本公开的优点以及附加方面的优点将在下面的具体实施例中进行详细说明。
技术特征:
1.带有状态受限的多单臂机械手分布式协同控制方法,其特征在于,包括如下步骤:
2.如权利要求1所述的带有状态受限的多单臂机械手分布式协同控制方法,其特征在于,等价的无约束系统的构建,包括如下步骤:
3.如权利要求2所述的带有状态受限的多单臂机械手分布式协同控制方法,其特征在于:针对单臂机械手的位置在状态空间方程里的表达与引入的映射后的变量,建立一对一状态映射关系;
4.如权利要求1所述的带有状态受限的多单臂机械手分布式协同控制方法,其特征在于:确定各单臂机械手之间的通信拓扑结构,并利用有向图描述各单臂机械手的通信连接关系。
5.如权利要求4所述的带有状态受限的多单臂机械手分布式协同控制方法,其特征在于:有向图中,以每个单臂机械手作为一个节点,节点之间的连线作为边,以单臂机械手之间的通信关系为边的权重;通过拉普拉斯矩阵表示多单臂机械手中领导者和跟随者的关系,作为领导者和跟随者的边的权重;其中,能够建立通信连接节点,对应的边权重设置为1,否则设置为0。
6.如权利要求1所述的带有状态受限的多单臂机械手分布式协同控制方法,其特征在于,为多单臂机械手系统中的每个跟随者建立简化的无约束跟踪控制任务,包括如下步骤:
7.如权利要求1所述的带有状态受限的多单臂机械手分布式协同控制方法,其特征在于:
8.带有状态受限的多单臂机械手分布式协同控制系统,其特征在于,包括:
9.一种电子设备,其特征在于,包括存储器和处理器以及存储在存储器上并在处理器上运行的计算机指令,所述计算机指令被处理器运行时,完成权利要求1-7任一项方法所述的步骤。
10.一种计算机可读存储介质,其特征在于,用于存储计算机指令,所述计算机指令被处理器执行时,完成权利要求1-7任一项方法所述的步骤。
技术总结
本公开涉及机械手控制技术领域,提出了一种带有状态受限的多单臂机械手分布式协同控制方法及系统,首先通过一对一状态映射得到等价的无约束系统,又采用分布式观测器估计领导者系统的状态,将多智能体系统协同一致性问题解耦成多个独立智能体的跟踪控制问题,构建增广系统,以代价函数最小为目标,获得最优协同控制策略。本公开将系统控制问题转化为无约束跟踪问题,能够在不违反状态约束的同时使性能指标得到优化。
技术研发人员:周琪,郭子杰,任鸿儒,林国怀,胡涛,于胜
受保护的技术使用者:深圳信息职业技术学院
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!