基于关节多方向随机运动的机器人模态辨识方法及系统
本发明属于工业机器人动力学领域,更具体地,涉及一种基于关节多方向随机运动的机器人模态辨识方法及系统。
背景技术:
1、工业机器人的串联结构带来了良好的可加工性,强冗余度和高灵活性,在航空航海、汽车装配等行业的大中型零件生产制造中发挥了越来越重要的作用,机器人的高柔性、多位姿的运动特点,为复杂曲面的加工提供了有效途径。工业机器人的结构主要由底座、关节、大臂、小臂和末端的执行器,其通常是刀具主轴系统组成,由于工业机器人具有多个旋转关节,在大型零件的铣削加工过程中能够提供更广的工作空间,加工时不会受到工作区域和生产形状的限制,但是这种开放的串联式结构会降低工业机器人整体的刚度,在铣削加工过程中,施加在末端执行器的加工力会产生过度振动,会降低零件加工过程的轨迹精度,导致零件加工表面的制造精度不够,可能满足不了具有复杂形状的零件的精加工要求。因此,需要对工业机器人运行状态下的动力学特性进行研究,准确的估计结构模态参数,分析零件加工过程存在的模态耦合颤振并加以抑制,这对于减少机器人末端执行器的振动,提高复杂零件的表面光滑度等表面质量,减少加工过程轨迹误差具有重要意义。
2、由于工业机器人是由多个柔性关节工业机械臂串联组合而成,其前端的各个关节、连杆结构和转子都对末端执行器的加工运动产生影响,复杂的运动特性也导致了末端执行器复杂的动力学特性,其混杂程度很高,难以精准定位其振动来源,使得工业机器人的振动分析与模态表征存在困难。目前获取工业机器人结构模态参数的方法基于模型验证的方法和基于实验验证的方法,对于多模态的工业机器人系统,基于模型验证的方法无法准确的预测所有阶次的频率,同时工业机器人的多关节串联系统会增加计算负荷;基于实验验证的方法中的工作模态分析只需要根据响应信号就可以辨识系统的模态,但需要满足白噪声激励的要求,这通常是在控制良好的实验室条件下进行的,而大多数机器人在实际加工过程中不能满足这种实验室环境条件,难以对机器人本体的各阶模态进行充分激发,导致这种方法难以得到广泛的运用。因此需要一种方法以深入了解机器人整体的结构动力学特征。
3、目前针对工业机器人的主振模态分析很少关注激发方向的影响,然而工业机器人处于不同的位姿状态时,机器人整体的质量分布会发生改变,从而引起不同方向的刚度分布的变化,而此时,如果对机器人施加的激励力的方向不合理可能引起频响函数响应不充分,从而导致模态分析的识别结果不完全,因此找到一种能够准确有效的辨识机器人模态参数的方法尤为重要。
技术实现思路
1、针对现有技术的以上缺陷或改进需求,本发明提供了一种基于关节多方向随机运动的机器人模态辨识方法及系统,其目的在于,通过对激发方式的设计,实现对机器人各阶模态的完整、准确、有效辨识。
2、为实现上述目的,按照本发明的一方面,提出了一种基于关节多方向随机运动的机器人模态辨识方法,包括如下步骤:
3、对机器人施加激励力,使机器人各关节做随机加减速运动,采集此过程中机器人各关节的振动信号;施加的激励力满足:各激励力有至少三个不共线方向,同时在机器人运动过程中各关节的激励力矩不同线;
4、对机器人各关节的振动信号进行处理,从而辨识得到机器人各阶模态。作为进一步优选的,施加的激励力满足:
5、di m(f)=d-r≥3
6、其中,f为所有输入激励力组成的输入力矩阵,dim(·)表示维度,d为输入激励力数量,r为作用于机器人的重复方向激励力。
7、作为进一步优选的,施加的激励力满足:
8、dim(x(r))=3
9、
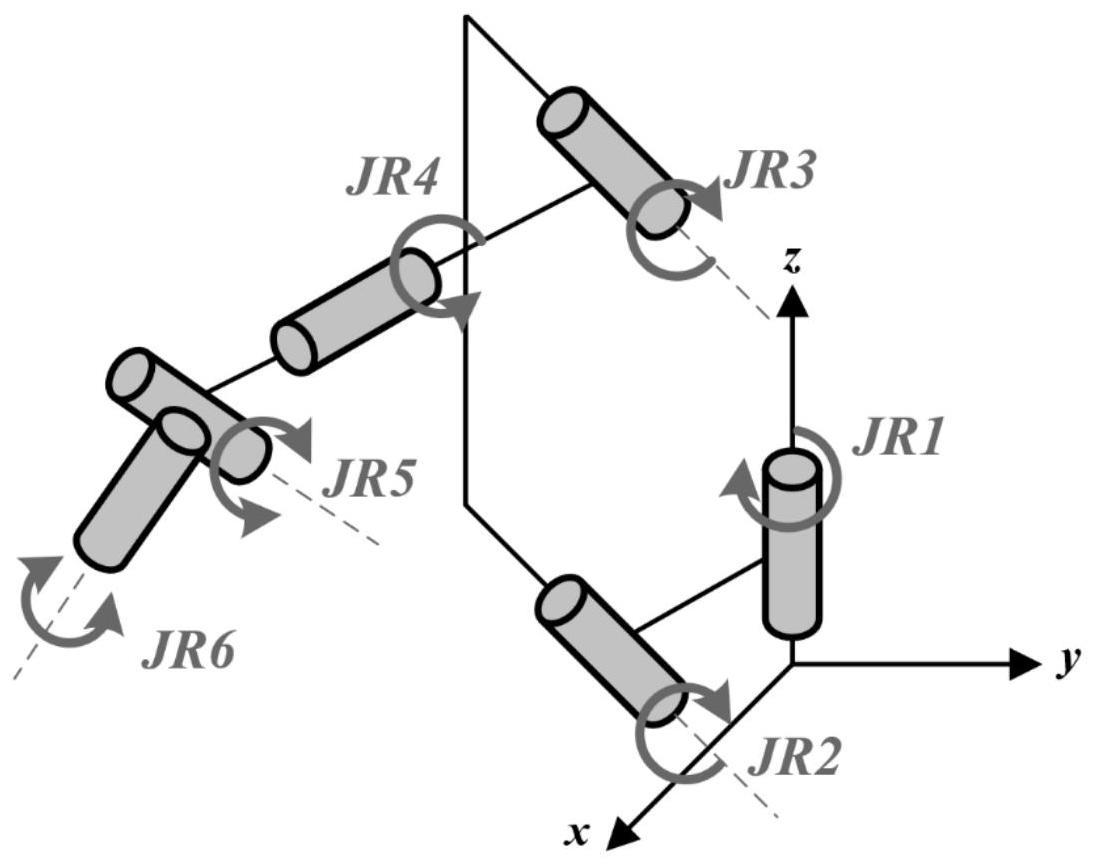
10、其中,任意构建空间直角坐标系,x(τ)为机器人受力在三个轴的投影,dim(·)表示维度;τax、τay、τaz分别表示第a个关节的激励力矩在x轴、y轴、z轴方向的投影,a=1,2…a,a为机器人关节总数。
11、作为进一步优选的,在机器人上布置加速度传感器,通过该加速度传感器获取机器人各个关节的振动信号。
12、作为进一步优选的,加速度传感器的布置方法具体为:在机器人底座、每个关节以及每个连杆均布置4个以上的加速度传感器。
13、作为进一步优选的,通过数控程序控制机器人运动,将运动的间隔时间设定为随机的序列,使机器人各关节做随机加减速运动,在启停过程中,各关节运动产生对机体的惯性冲击,机器人产生相应的振动响应。
14、作为进一步优选的,通过oma分析对机器人各关节的振动信号进行处理,从而辨识得到机器人各阶模态。
15、按照本发明的另一方面,提供了一种基于关节多方向随机运动的机器人模态辨识系统,包括控制单元、采集单元以及处理单元,其中:
16、所述控制单元用于对机器人施加激励力,使机器人各关节做随机加减速运动;施加的激励力满足:各激励力具有至少三个不共线方向,同时在机器人运动过程中各关节的激励力矩不同线;
17、所述采集单元用于采集运动过程中机器人各关节的振动信号;
18、所述处理单元用于对机器人各关节的振动信号进行处理,辨识得到机器人各阶模态。
19、作为进一步优选的,所述采集单元包括多个布置在机器人上的加速度传感器。
20、作为进一步优选的,通过oma分析对机器人各关节的振动信号进行处理,从而辨识得到机器人各阶模态。
21、总体而言,通过本发明所构思的以上技术方案与现有技术相比,主要具备以下的技术优点:
22、1.本发明通过对机器人激励的方式进行设计,可以保证在模态振型的各个方向均产生激励力的作用,从而对加工过程中机器人各阶模态进行完整、准确、有效的辨识,且该方法适应于多种形式的工业机器人在不同的位姿下模态参数识别。
23、2.本发明考虑了机器人存在的空间冗余度的问题,具体的,在不同位姿的加工过程中,由于机器人具有一定额外的运动自由度(即冗余度),会存在对于机器人末端处于同一位置,但机器人关节角度和姿态不同的情况,基于此本发明提出了激励力矩需满足的条件,避免机器人冗余度的影响,保证机器人的不同模态阶次能够被完备有效的识别。
技术特征:
1.一种基于关节多方向随机运动的机器人模态辨识方法,其特征在于,包括如下步骤:
2.如权利要求1所述的基于关节多方向随机运动的机器人模态辨识方法,其特征在于,施加的激励力满足:
3.如权利要求2所述的基于关节多方向随机运动的机器人模态辨识方法,其特征在于,施加的激励力满足:
4.如权利要求1所述的基于关节多方向随机运动的机器人模态辨识方法,其特征在于,在机器人上布置加速度传感器,通过该加速度传感器获取机器人各个关节的振动信号。
5.如权利要求4所述的基于关节多方向随机运动的机器人模态辨识方法,其特征在于,加速度传感器的布置方法具体为:在机器人底座、每个关节以及每个连杆均布置4个以上的加速度传感器。
6.如权利要求1所述的基于关节多方向随机运动的机器人模态辨识方法,其特征在于,通过数控程序控制机器人运动,将运动的间隔时间设定为随机的序列,使机器人各关节做随机加减速运动,在启停过程中,各关节运动产生对机体的惯性冲击,机器人产生相应的振动响应。
7.如权利要求1-6任一项所述的基于关节多方向随机运动的机器人模态辨识方法,其特征在于,通过oma分析对机器人各关节的振动信号进行处理,从而辨识得到机器人各阶模态。
8.一种基于关节多方向随机运动的机器人模态辨识系统,其特征在于,包括控制单元、采集单元以及处理单元,其中:
9.如权利要求8所述的基于关节多方向随机运动的机器人模态辨识系统,其特征在于,所述采集单元包括多个布置在机器人上的加速度传感器。
10.如权利要求8或9所述的基于关节多方向随机运动的机器人模态辨识系统,其特征在于,通过oma分析对机器人各关节的振动信号进行处理,从而辨识得到机器人各阶模态。
技术总结
本发明属于工业机器人动力学领域,并具体公开了一种基于关节多方向随机运动的机器人模态辨识方法及系统,其包括如下步骤:对机器人施加激励力,使机器人各关节做随机加减速运动,采集此过程中机器人各关节的振动信号;施加的激励力满足:各激励力有至少三个不共线方向,同时各关节的激励力矩不同线,在这种激励方式的激发下,机器人的各个方向的模态振型能够完全被激发出来;进而对机器人各关节的振动信号进行处理,从而辨识得到机器人各阶模态。本发明可实现对机器人各阶模态的完整、准确、有效辨识。
技术研发人员:毛新勇,卫倩,郭秋爽,陈正龙,罗文龙,郭峻彤,唐小卫,彭芳瑜
受保护的技术使用者:华中科技大学
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!