一种组合式轨道车辆零件图像采集机器人及方法与流程
本发明属于轨道检修,尤其涉及一种组合式轨道车辆零件图像采集机器人及方法。
背景技术:
1、随着轨道交通检测智能化、自动化的发展,由协作机械臂和移动agv组成的复合机器人在该行业中的运用越来越广泛,例如为了采集轨道车辆各个部件的图像,就是利用agv带动机械臂并在机械臂前端设置相机来完成的。
2、然而在检测流程中协作机械臂的缺点也逐渐暴露出来:六轴协作机械臂工作空间中存在圆柱形死区,通常无法对处于该区域的对象执行任务、也无法通过该区域。这样的特性导致其在移动平台上使用、或是检测对象非固定位置摆放时,会有被检对象上不可检测区域不固定,降低检测效率。
3、另外由于在进行图像采集时,采集装置需要运行到多个采集点进行采集,由于agv运动的误差以及轨道车辆停靠的误差,使得每到一个采集点都需要对六轴机械臂进行重新校准。而六轴机械臂的校准较为繁琐使得整个图像采集流程变得漫长。
技术实现思路
1、有鉴于此,本发明提供一种组合式轨道车辆零件图像采集机器人及方法,每到一个停靠点只需要进行一次标定即可按照示教进行图像采集。
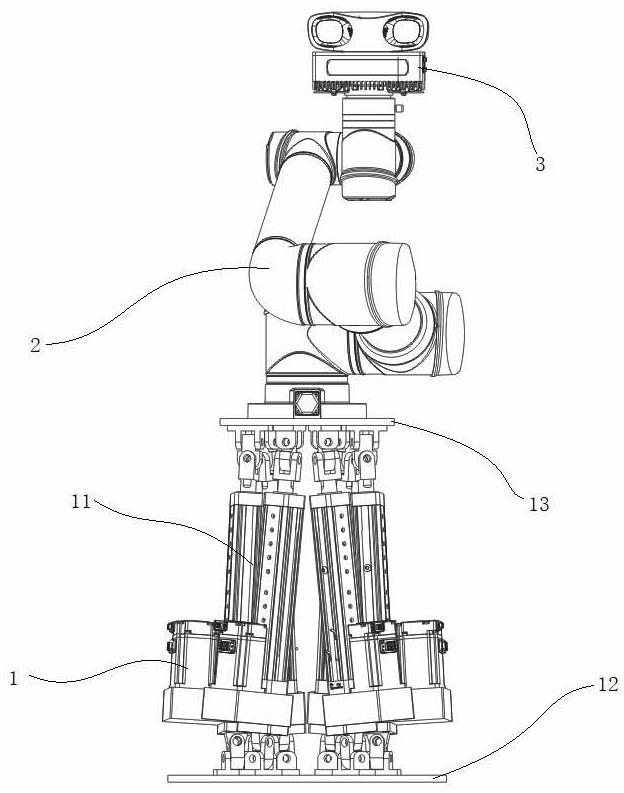
2、为解决以上技术问题,本发明的技术方案为采用一种组合式图像采集机器人,包括可沿轨道运行的小车;所述小车上固定有并联机器人;所述并联机器人顶端安装有串联机械臂,所述串联机械臂末端安装有图像采集模块。
3、作为一种改进,所述并联机器人包括与小车连接的底板以及用于承载串联机械臂的平台;所述底板和平台之间设置有若干可伸缩的支撑杆;所述支撑杆的上端和下端分别与平台和底板铰接。
4、作为一种改进,所述支撑杆为6根,并且两根一组分为三组;同组内的两根支撑杆呈八字形排布;三组支撑杆沿圆周均匀布置。
5、作为一种进一步的改进,所述串联机械臂为六轴机械臂。
6、作为另一种更进一步的改进,所述图像采集模块为3d图像采集单元。
7、本发明还提供一种轨道车辆零件图像采集方法,应用于上述组合式图像采集机器人,包括:
8、示教步骤,确定小车停靠点以及每个停靠点需要采集的轨道车辆零件位置;将小车行驶到停靠点,对串联机械臂进行示教采集示教轨道车辆上每个需要采集的零件的3d图像作为模板;
9、采集步骤,将小车行驶到停靠点,拍摄该停靠点待采集轨道车辆上任意一个需要采集的零件获得该零件的3d对比图像;将所述3d对比图像与该零件的模板进行对比,获取并联机器人平台在3d对比图像与模板之间的位姿差异;按照所述位姿差异驱动并联机器人将其平台复位;按照示教采集该停靠点所有零件图像;
10、重复采集步骤,直到所有停靠点采集完毕。
11、作为一种改进,在示教步骤中,当小车行驶到停靠点后将并联机器人顶端上升至预设高度;
12、在采集步骤中,当小车行驶到停靠点后将并联机器人顶端上升至预设高度。
13、作为一种改进,所述获取并联机器人平台在3d对比图像与模板之间的位姿差异的方法为:
14、将所述3d对比图像与模板进行配准,获得图像采集模块的位姿差异;
15、将图像采集模块坐标系上的位姿差异转移到串联机器人末端坐标系下;
16、将位姿差异从串联机器人末端坐标系转移到串联机器人底座坐标系下;
17、将位姿差异从串联机器人底座坐标系转移到并联机器人平台坐标系下。
18、作为一种改进,将位姿差异转换为并联机器人平台的运动量的方法为:
19、设图像采集模块的位姿差异为;
20、通过标定获取串联机器人末端坐标系到图像采集模块坐标系的齐次变换矩阵为;
21、通过读取机械臂应用编程接口获取串联机器人底座坐标系到串联机器人末端坐标系的齐次变换矩阵为;
22、通过标定获取串联机器人底座坐标系到并联机器人平台坐标系的齐次变换矩阵为;
23、设并联机器人平台的运动量为,则
24、。
25、本发明的有益之处在于:
26、本发明将串联机械臂和并联机器人组合后用于采集轨道车辆零件的图像信息,使得本机器人有并联机器人定位精度高和串联机械臂可完成复杂动作的优点。同时消除了串联机器人的工作死区,使其在采集图像时可真正做到360°无死角。
27、另外,在组合并联机器人后,通过并联机器人的位移来消除agv和轨道车辆停靠的误差,使得串联机器人可根据示教进行图像采集,而无需每次采集都进行标定,大大简化了采集图像的流程。
28、同时,由于并联机器人在定位精度方面的优势,也使得最后采集的图像精度大大提高,为后续的检修工作打下了良好的基础。
技术特征:
1.一种组合式轨道车辆零件图像采集机器人,其特征在于:包括可沿轨道运行的小车;所述小车上固定有并联机器人;所述并联机器人顶端安装有串联机械臂,所述串联机械臂末端安装有图像采集模块。
2.根据权利要求1所述的一种组合式轨道车辆零件图像采集机器人,其特征在于:所述并联机器人包括与小车连接的底板以及用于承载串联机械臂的平台;所述底板和平台之间设置有若干可伸缩的支撑杆;所述支撑杆的上端和下端分别与平台和底板铰接。
3.根据权利要求2所述的一种组合式轨道车辆零件图像采集机器人,其特征在于:所述支撑杆为6根,并且两根一组分为三组;同组内的两根支撑杆呈八字形排布;三组支撑杆沿圆周均匀布置。
4.根据权利要求1所述的一种组合式轨道车辆零件图像采集机器人,其特征在于:所述串联机械臂为六轴机械臂。
5.根据权利要求1所述的一种组合式轨道车辆零件图像采集机器人,其特征在于:所述图像采集模块为3d图像采集单元。
6.一种轨道车辆零件图像采集方法,应用于权利要求1~5中任意一项所述的组合式轨道车辆零件图像采集机器人,其特征在于包括:
7.根据权利要求6所述的一种轨道车辆零件图像采集方法,其特征在于:在示教步骤中,当小车行驶到停靠点后将并联机器人顶端上升至预设高度;
8.根据权利要求6所述的一种轨道车辆零件图像采集方法,其特征在于所述获取并联机器人平台在3d对比图像与模板之间的位姿差异的方法为:
9.根据权利要求8所述的一种轨道车辆零件图像采集方法,其特征在于将位姿差异转换为并联机器人平台的运动量的方法为:
技术总结
本发明属于轨道检修技术领域,公开了一种组合式轨道车辆零件图像采集机器人及方法,该机器人包括可沿轨道运行的小车;所述小车上固定有并联机器人;所述并联机器人顶端安装有串联机械臂,所述串联机械臂末端安装有图像采集模块。本发明将串联机械臂和并联机器人组合后用于采集轨道车辆零件的图像信息,使得本机器人有并联机器人定位精度高和串联机械臂可完成复杂动作的优点。同时消除了串联机器人的工作死区,使其在采集图像时可真正做到360°无死角。另外,在组合并联机器人后,通过并联机器人的位移来消除AGV和轨道车辆停靠的误差,使得串联机器人可根据示教进行图像采集,而无需每次采集都进行标定,大大简化了采集图像的流程。
技术研发人员:杨凯,梁斌,高春良,谢利明
受保护的技术使用者:成都盛锴科技有限公司
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!