移动机器人的防跌落方法、移动机器人及电子设备与流程
本申请涉及图像处理领域,尤其涉及一种移动机器人的防跌落方法、移动机器人及电子设备。
背景技术:
1、随着社会的发展以及科技的进步,移动机器人被广泛应用于各行各业,比如,家庭中使用移动机器人打扫卫生、餐厅使用移动机器人送餐等。移动机器人在工作过程中会遇到比如门槛等高度急剧变化的区域,为了防止机器人跌落造成安全隐患,移动机器人一般都有防跌落功能。
2、现有技术中常用的防跌落方法是在移动机器人的底部安装红外发射接收装置,通过判断红外信号数据波形变化来判断移动机器人的当前状态,达到防跌落效果。然而,该红外发射接收装置只能接收移动机器人底部的地形状态,无法预测移动机器人后续行进路线上的跌落风险,防跌落效果不甚理想。
技术实现思路
1、有鉴于此,本申请提供一种移动机器人的防跌落方法、移动机器人及电子设备,以能够有效预测移动机器人的跌落风险,以提高防跌落效果。
2、本申请实施例提供一种移动机器人的防跌落方法,该方法包括:
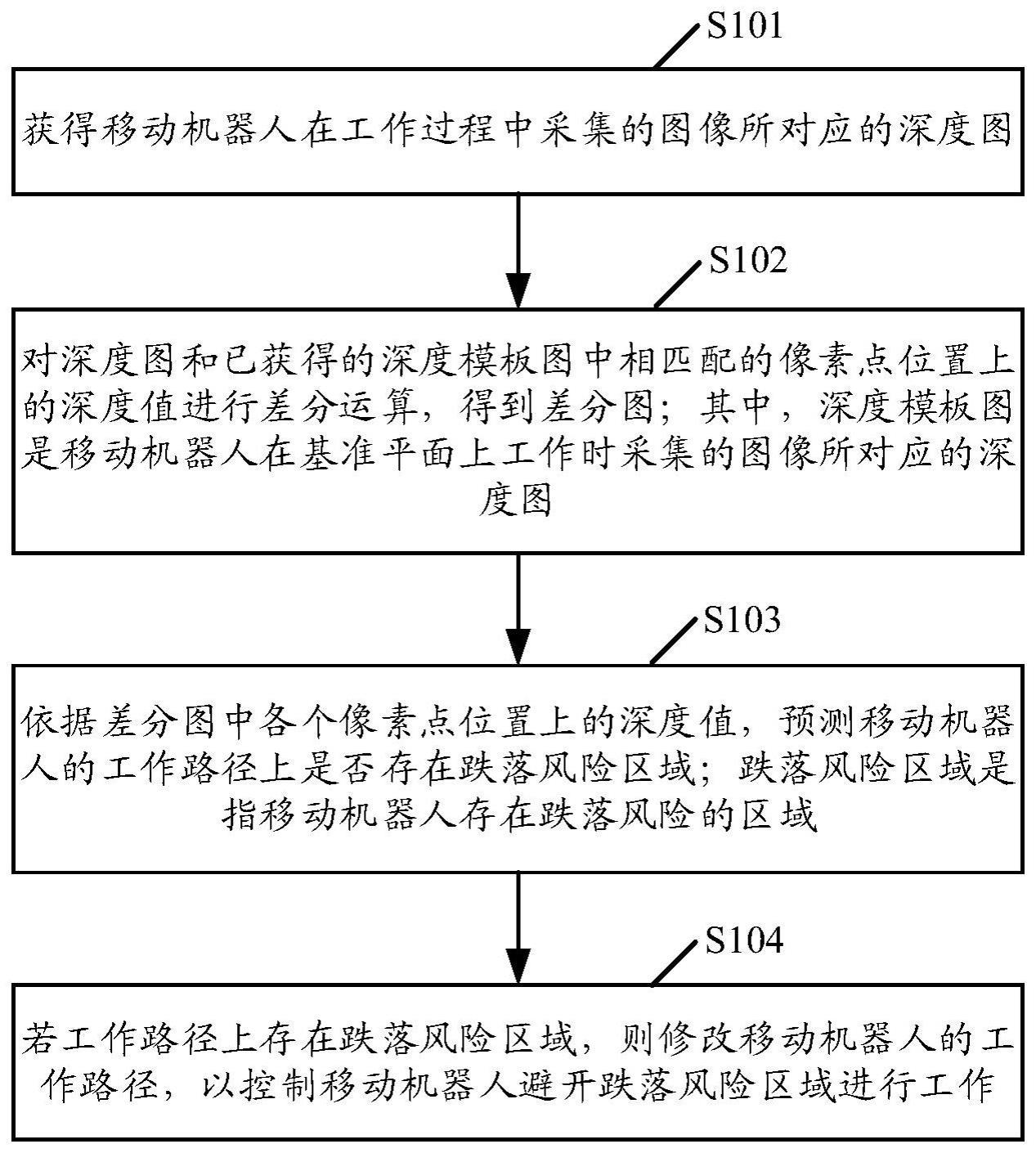
3、获得移动机器人在工作过程中采集的图像所对应的深度图;
4、对深度图和已获得的深度模板图中相匹配的像素点位置上的深度值进行差分运算,得到差分图;其中,深度模板图是移动机器人在基准平面上工作时采集的图像所对应的深度图;
5、依据差分图中各个像素点位置上的深度值,预测移动机器人的工作路径上是否存在跌落风险区域;跌落风险区域是指移动机器人存在跌落风险的区域;
6、若工作路径上存在跌落风险区域,则修改移动机器人的工作路径,以控制移动机器人避开跌落风险区域进行工作。
7、本申请实施例还提供一种移动机器人,包括:单目图像采集组件和处理器;
8、单目图像采集组件,用于在移动机器人工作过程中采集图像;
9、处理器,用于获得移动机器人在工作过程中采集的图像所对应的深度图;
10、对深度图和已获得的深度模板图中相匹配的像素点位置上的深度值进行差分运算,得到差分图;其中,深度模板图是移动机器人在基准平面上工作时采集的图像所对应的深度图;
11、依据差分图中各个像素点位置上的深度值,预测移动机器人的工作路径上是否存在跌落风险区域;跌落风险区域是指移动机器人存在跌落风险的区域;
12、若工作路径上存在跌落风险区域,则修改移动机器人的工作路径,以控制移动机器人避开跌落风险区域进行工作。
13、本申请实施例还提供一种电子设备,包括:处理器和用于存储计算机程序指令的存储器,计算机程序指令在被处理器运行时使得处理器执行如上方法的步骤。
14、本申请实施例还提供一种机器可读存储介质,该存储介质存储有计算机程序指令,当该计算机程序指令被执行时,能够实现如上方法的步骤。
15、由以上技术方案可以看出,本申请实施例中通过对移动机器人在工作过程(简称工作地面)中采集的图像所对应的深度图和深度图模板(移动机器人在基准平面上工作时采集的图像所对应的深度图)中相匹配的像素点位置上的深度值做差分运算,以实现基于移动机器人在工作过程中采集的图像中每个像素点与基准平面上每个像素点的深度值的差异来体现工作地面与基准地面的高度差,以基于该高度差预测移动机器人的工作路径上是否存在跌落风险区域,这实现了能够有效预测移动机器人的跌落风险,以提高防跌落效果;
16、进一步地,本实施例中,在发现工作路径上存在跌落风险区域时,则修改移动机器人的工作路径,以控制移动机器人避开跌落风险区域进行工作,提高移动机器人的防跌落效果。
技术特征:
1.一种移动机器人的防跌落方法,其特征在于,包括:
2.根据权利要求1所述的方法,其特征在于,所述移动机器人的指定位置设置有单目图像采集组件;
3.根据权利要求1所述的方法,其特征在于,所述获得移动机器人在工作过程中采集的图像所对应的深度图包括:
4.根据权利要求1所述的方法,其特征在于,所述对所述深度图和已获得的深度模板图中相匹配的像素点位置上的深度值进行差分运算,得到差分图包括:
5.根据权利要求1所述的方法,其特征在于,所述依据所述差分图中各个像素点位置上的深度值,预测所述移动机器人的工作路径上是否存在跌落风险区域包括:
6.根据权利要求5所述的方法,其特征在于,所述跌落风险区域通过以下步骤定位:
7.根据权利要求5所述的方法,其特征在于,所述预设深度阈值和所述预设面积阈值分别与所述移动机器人的轮子的尺寸呈正相关关系。
8.一种移动机器人,其特征在于,包括:单目图像采集组件和处理器;
9.根据权利要求8所述的移动机器人,其特征在于,所述获得移动机器人在工作过程中采集的图像所对应的深度图包括:
10.一种电子设备,其特征在于,包括:
技术总结
本申请提供一种移动机器人的防跌落方法、移动机器人及电子设备。该方法通过对移动机器人在工作过程中采集的图像所对应的深度图和深度图模板中相匹配的像素点位置上的深度值做差分运算,以实现基于移动机器人在工作过程中采集的图像中每个像素点与基准平面上的每个像素点的深度值的差异来体现工作地面与基准地面的高度差,以基于该高度差预测移动机器人的工作路径上是否存在跌落风险区域,这实现了能够有效预测移动机器人的跌落风险,以提高防跌落效果。进一步地,该方法中,在发现工作路径上存在跌落风险区域时,则修改移动机器人的工作路径,以控制移动机器人避开跌落风险区域进行工作,提高移动机器人的防跌落效果。
技术研发人员:王永力
受保护的技术使用者:杭州萤石软件有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!