履带板抓取装置、履带板抓取系统和履带板抓取方法与流程
本发明涉及井下机电,具体而言,涉及一种履带板抓取装置、履带板抓取系统和履带板抓取方法。
背景技术:
1、工程车是建筑工程的主干力量,由于工程车在工程的运载,挖掘,抢修,甚至作战等过程中的运用,使得建筑工程的进度倍增,大大地减少了所需的人力物力。
2、履带板是工程车辆的主要组件,主要用于工程车辆的行走结构中,在工程车的使用过程中,需要对履带板进行拆卸维护。
3、现有的履带板维护方法,往往在维护人员拆卸后进行集中堆叠,然后运输到维护车间,并在后续的维护过程中,需采用传统的吊具对履带板进行起吊,如果存在堆叠混乱的履带板,在起吊的过程中就会产生滑脱和难以定位夹持的问题,极易砸伤维护人员,最终产生安全事故,且对堆叠履带板进行移动的效率较差,需要耗费大量的人力。
技术实现思路
1、本发明的主要目的在于提供一种履带板抓取装置、履带板抓取系统和履带板抓取方法,以解决现有技术中的工程车的履带板的移动过程需要耗费大量的人力的问题。
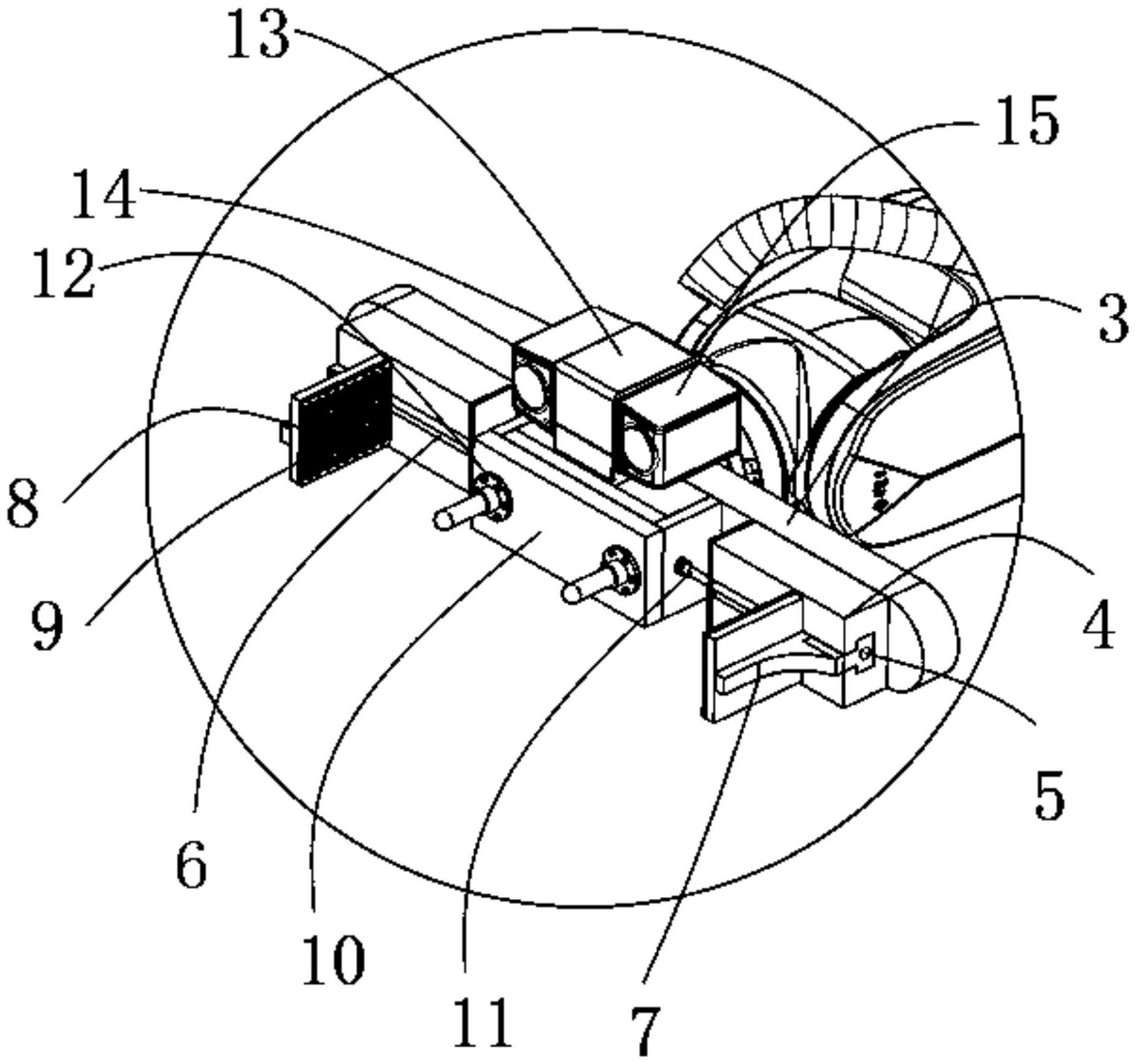
2、为了实现上述目的,根据本发明的第一个方面,提供了一种履带板抓取装置,包括:机械手,机械手的固定端固定在预定位置处;夹持部件,夹持部件包括:安装板,安装板设置在机械手的自由端;安装箱,安装箱设置在安装板上;两个夹持板,两个夹持板均设置在安装板上且分别位于安装箱的相对两侧,各个夹持板均沿靠近或远离安装箱的方向可运动地设置,以与安装箱共同围成用于夹持履带板的夹持空间;摄像部件,摄像部件设置在安装板上,摄像部件包括朝向安装板的远离机械手的一侧设置的摄像头,以用于拍摄履带板,以根据拍摄结果来控制夹持部件的动作。
3、进一步地,夹持部件包括:两个滑轨,两个滑轨均固定在安装板上且分别位于安装箱的相对两侧;两个滑块,两个夹持板一一对应地设置在两个滑块上,两个滑块与两个滑轨一一对应地滑动连接。
4、进一步地,夹持部件包括两个气缸,两个气缸的缸体均固定在安装箱内,两个气缸的活塞杆的自由端分别穿过安装箱的相对两侧的两个箱壁面后分别与两个滑块固定连接。
5、进一步地,夹持部件包括两个缓冲垫,两个缓冲垫一一对应地设置在两个夹持板上,各个缓冲垫均位于相应的夹持板的靠近安装箱的一侧。
6、进一步地,夹持部件包括两个摩擦垫,两个摩擦垫一一对应地设置在两个缓冲垫上,各个摩擦垫均位于相应的缓冲垫的靠近安装箱的一侧。
7、进一步地,夹持部件包括定位杆,定位杆设置在安装箱上且位于安装箱的靠近夹持空间的一侧,以用于对履带板进行定位。
8、进一步地,定位杆的数量为两个,两个定位杆间隔设置在安装箱上。
9、进一步地,履带板抓取装置还包括设备台,机械手的固定端固定在设备台上;和/或进一步地,摄像部件还包括设备箱和补光灯,设备箱安装在安装板上,摄像头和补光灯分别固定在设备箱相对两侧。
10、根据本发明的第二个方面,提供了一种履带板抓取系统,履带板抓取系统适用于上述的履带板抓取装置,履带板抓取系统包括:微处理器模块,微处理器模块用于进行数据的处理和程序的执行;复杂构件视觉图像处理及特征识别匹配模块,微处理器模块与复杂构件视觉图像处理及特征识别匹配模块之间双向信号连接,以用于进行图像处理及特征识别匹配;机器视觉伺服定位模块,微处理器模块与机器视觉伺服定位模块之间双向信号连接,机器视觉伺服定位模块与摄像头之间双向信号连接,以用于接收摄像头所拍摄的图像信息,以对履带板进行定位;控制模块,微处理器模块与控制模块之间双向信号连接,控制模块与机械手和夹持部件的两个气缸之间均双向信号连接,以用于控制机械手和两个气缸运动;机器视觉的位姿调整精准校正,微处理器模块与机器视觉的位姿调整精准校正之间双向信号连接,机器视觉的位姿调整精准校正用于进行位姿调整精准校正;复杂构件视觉三维测量与标定模块,微处理器模块与复杂构件视觉三维测量与标定模块之间双向信号连接,复杂构件视觉三维测量与标定模块用于进行视觉三维测量与标定;视觉测量系统搭建标定控制场,微处理器模块与视觉测量系统搭建标定控制场之间双向信号连接,视觉测量系统搭建标定控制场用于搭建标定控制场。
11、进一步地,机器视觉伺服定位模块包括:双目立体视觉模块,双目立体视觉模块与摄像头连接,以用于获取高清图像;高速图像采集板卡,高速图像采集板卡与双目立体视觉模块连接,以用于将高清图像经过采样、量化以后转换为数字图像;图像处理控制模块,图像处理控制模块与高速图像采集板卡连接,以用于处理数字图像。
12、根据本发明的第三个方面,提供了一种履带板抓取方法,适用于上述的履带板抓取系统,履带板抓取方法包括:s1、通过机器视觉伺服定位模块获取摄像头所拍摄的图像;s2、通过复杂构件视觉图像处理及特征识别匹配模块、机器视觉的位姿调整精准校正、复杂构件视觉三维测量与标定模块与视觉测量系统搭建标定控制场对夹持部件的位置进行确定;s3、通过控制模块驱动机械手运动以对机械手的工作位置进行调整,并对夹持部件的工作位置进行微调,以确保夹持部件的定位杆位于履带板上的定位孔的正上方;s4、通过控制模块驱动机械手运动以使定位杆插入定位孔中,并使夹持部件的安装箱与履带板贴合;通过控制模块驱动两个气缸运动,以推动夹持部件的两个夹持板运动,以夹持履带板;s5、通过控制模块驱动机械手运动,以将履带板移动到指定放置位置。
13、应用本发明的技术方案,本发明的履带板抓取装置包括:机械手,机械手的固定端固定在预定位置处;夹持部件,夹持部件包括:安装板,安装板设置在机械手的自由端;安装箱,安装箱设置在安装板上;两个夹持板,两个夹持板均设置在安装板上且分别位于安装箱的相对两侧,各个夹持板均沿靠近或远离安装箱的方向可运动地设置,以与安装箱共同围成用于夹持履带板的夹持空间;摄像部件,摄像部件设置在安装板上,摄像部件包括朝向安装板的远离机械手的一侧设置的摄像头,以用于拍摄履带板,以根据拍摄结果来控制夹持部件的动作。这样,本发明的履带板抓取装置通过机械手、夹持部件和摄像部件的控制来实现对堆叠较为杂乱的履带板的稳定夹持和高强度移动,在保证了对履带板的移动效率的同时,避免了出现因对履带板的错位夹持而使大质量履带板掉落砸伤工作人员的生产事故,解决了现有技术中的工程车的履带板的移动过程需要耗费大量的人力的问题。
技术特征:
1.一种履带板抓取装置,其特征在于,包括:
2.根据权利要求1所述的履带板抓取装置,其特征在于,所述夹持部件包括:
3.根据权利要求2所述的履带板抓取装置,其特征在于,所述夹持部件包括两个气缸(11),所述两个气缸(11)的缸体均固定在所述安装箱(10)内,所述两个气缸(11)的活塞杆的自由端分别穿过所述安装箱(10)的相对两侧的两个箱壁面后分别与所述两个滑块(5)固定连接。
4.根据权利要求1所述的履带板抓取装置,其特征在于,所述夹持部件包括两个缓冲垫(8),所述两个缓冲垫(8)一一对应地设置在所述两个夹持板(7)上,各个所述缓冲垫(8)均位于相应的所述夹持板(7)的靠近所述安装箱(10)的一侧。
5.根据权利要求4所述的履带板抓取装置,其特征在于,所述夹持部件包括两个摩擦垫(9),所述两个摩擦垫(9)一一对应地设置在所述两个缓冲垫(8)上,各个所述摩擦垫(9)均位于相应的所述缓冲垫(8)的靠近所述安装箱(10)的一侧。
6.根据权利要求1所述的履带板抓取装置,其特征在于,所述夹持部件包括定位杆(12),所述定位杆(12)设置在所述安装箱(10)上且位于所述安装箱(10)的靠近所述夹持空间的一侧,以用于对所述履带板进行定位。
7.根据权利要求6所述的履带板抓取装置,其特征在于,所述定位杆(12)的数量为两个,两个所述定位杆(12)间隔设置在所述安装箱(10)上。
8.根据权利要求1所述的履带板抓取装置,其特征在于,
9.一种履带板抓取系统,其特征在于,所述履带板抓取系统适用于根据权利要求1至8中任一项所述的履带板抓取装置,所述履带板抓取系统包括:
10.根据权利要求9所述的履带板抓取系统,其特征在于,所述机器视觉伺服定位模块(18)包括:
11.一种履带板抓取方法,其特征在于,适用于权利要求9或10所述的履带板抓取系统,所述履带板抓取方法包括:
技术总结
本发明提供了一种履带板抓取装置、履带板抓取系统和履带板抓取方法,履带板抓取装置包括:机械手,机械手的固定端固定在预定位置处;夹持部件,夹持部件包括:安装板,安装板设置在机械手的自由端;安装箱,安装箱设置在安装板上;两个夹持板,两个夹持板均设置在安装板上且分别位于安装箱的相对两侧,各个夹持板均沿靠近或远离安装箱的方向可运动地设置,以与安装箱共同围成用于夹持履带板的夹持空间;摄像部件,摄像部件设置在安装板上,摄像部件包括朝向安装板的远离机械手的一侧设置的摄像头,以用于拍摄履带板,以根据拍摄结果来控制夹持部件的动作,以解决现有技术中的工程车的履带板的移动过程需要耗费大量的人力的问题。
技术研发人员:呼木吉力吐,张利军,栗飞
受保护的技术使用者:神华准格尔能源有限责任公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!