一种工业机器人柔性关节扭转角的前馈补偿控制方法
本发明涉及机器人,具体涉及一种工业机器人柔性关节扭转角的前馈补偿控制方法。
背景技术:
1、工业机器人已成为智能制造产业的重要组成部分,广泛应用于装配、焊接、打磨等作业。工业机器人能够自主学习和适应环境,进行更加复杂的操作,正朝着高精度、智能化、柔性化和协作化的方向发展,为工业生产带来更多创新和发展机遇,也对工业机器人的控制性能提出了更高的要求。谐波减速器具有大传动比和高传动效率等优点,广泛应用于工业机器人的柔性关节,但是由于传动过程中谐波减速器柔轮的周期性形变和啮合齿面非线性摩擦等特性,因此在机器人关节传动过程中会存在迟滞现象,表现出非对称、速率相关及强非线性等特性,而这些特性严重制约机器人重复定位精度的进一步提高。
2、迟滞现象的建模方法主要分为基于物理机制模型和基于迟滞算子模型两种。基于物理机制模型是根据特定物理机制,描述迟滞特性,常见的有maxwell、jiles-atherton、duhem、bouc-wen和stoner-wohlfarth等模型。但不同对象的迟滞物理机制不同,建立的物理模型只适用于特定的一类智能材料,且计算复杂耗时、参数在线辨识及模型求逆困难,难以应用于高精度实时控制。基于迟滞算子模型是基于系统的输入输出数据进行建模,常用的有preisach、prandtl-ishlinskii和krasnosel’skii-pokrovskii等模型。但这些模型不是基于特定对象的物理机制,模型参数没有明确的物理意义。其中preisach模型因其对复杂迟滞特性的建模能力强、迟滞非线性预测能力强、通用性好等特点而得到广泛应用,但preisach模型只能描述对称和速率无关的迟滞特性,对于工业机器人柔性关节具有的非对称、速率相关及强非线性迟滞特性,直接利用preisach模型描述,将产生较大的模型误差。
3、为此,有文献提出一种与输入速率相关的双曲正切函数动态preisach迟滞算子,描述超磁致伸缩驱动器磁滞依赖输入速率的特性,但形状函数与输入速率之间的关系假定为线性函数无法准确描述迟滞的强非线性特性。有文献将preisach模型融入到深度学习网络结构中,利用傅里叶变换计算得到输入信号的速率,并将速率输入到非线性层,通过非线性变换,产生速率相关的非线性项并输入到迟滞模型中,从而得到速率相关的preisach迟滞模型,提高了preisach模型的泛化能力。有文献通过结合preisach模型和长短期记忆递归神经网络,建立了速率相关迟滞模型。有文献首先从数学上证明了速率无关的preisach模型实际上是一个具有二阶激活函数的对角递归神经网络(drnn),在特定条件下,drnn神经元是一个多功能的速率相关滞后系统,由这些神经元组成的drnn可以用于建模速率相关的滞后模型。有文献将历史输入信息引入preisach函数,利用神经网络进行辨识,构造了一个新的输入历史相关动态preisach模型。有文献结合preisach模型和narx神经网络构建混合模型,实现速率相关滞后建模。但上述文献未能综合考虑迟滞的非对称、速率相关及强非线性特性,不能有效地描述工业机器人谐波减速器柔性关节所表现出的非对称、速率相关及强非线性特性复杂迟滞特性。
技术实现思路
1、本发明所要解决的是工业机器人含有谐波减速器柔性关节所具有非对称、速率相关及强非线性的复杂迟滞特性对关节执行精度影响的问题,提供一种工业机器人柔性关节扭转角的前馈补偿控制方法。
2、为解决上述问题,本发明是通过以下技术方案实现的:
3、一种工业机器人柔性关节扭转角的前馈补偿控制方法,包括步骤如下:
4、步骤1、构建深度神经网络迟滞模型,并通过梯度下降法对深度神经网络迟滞模型的参数即权值和偏置进行更新,从而完成深度神经网络迟滞模型的建模;
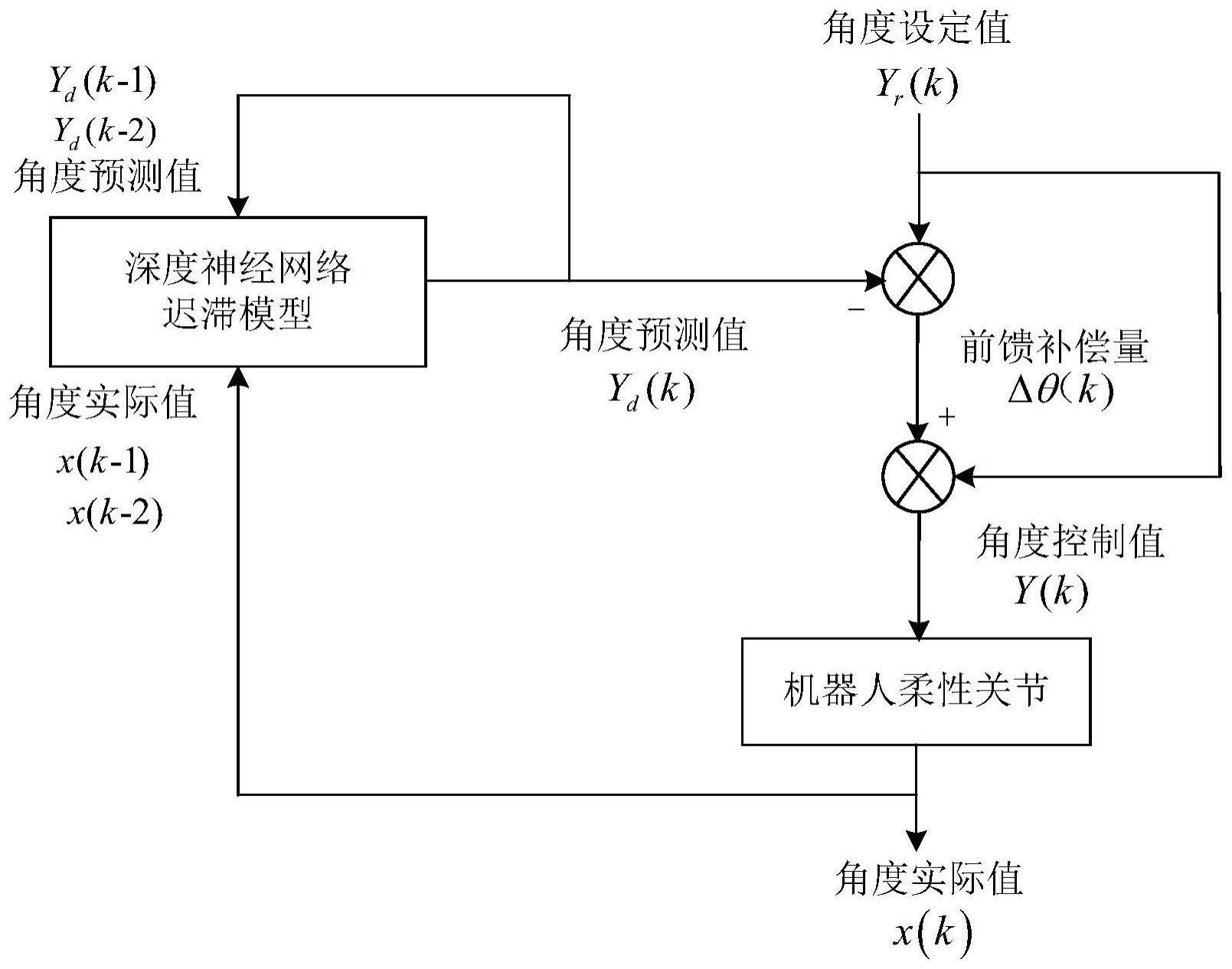
5、步骤2、将机器人柔性关节输出的k-2时刻的角度实际值x(k-2)和k-1时刻的角度实际值x(k-1),以及深度神经网络迟滞模型输出的k-2时刻的角度预测值yd(k-2)和k-1时刻的角度预测值yd(k-1)一并送入到深度神经网络迟滞模型中,得到k时刻的角度预测值yd(k);
6、步骤3、将k时刻的角度设定值yr(k)减去k时刻的角度预测值yd(k),得到k时刻的前馈补偿量δθ(k);
7、步骤4、在k时刻的角度设定值yr(k)上叠加k时刻的前馈补偿量δθ(k),得到k时刻的角度控制值y(k),并将k时刻的角度控制值y(k)送入机器人柔性关节的驱动端,以实现对机器人柔性关节扭转角的前馈补偿。
8、上述步骤1中,深度神经网络迟滞模型的数学表示为:
9、
10、式中,x(k-2)和x(k-1)分别为k-1时刻和k时刻的深度神经网络迟滞模型输入向量,即k-1时刻和k时刻的角度实际值;yd(k-2)、yd(k-1)和yd(k)分别为k-2时刻、k-1时刻和k时刻的深度神经网络迟滞模型输出向量,即k-2时刻、k-1时刻和k时刻的角度预测值;wy为输出层的权值向量,by为输出层的偏置向量;h5(k)表示k时刻的第五隐藏层输出向量;wh5为第五隐藏层的权值向量,bh5为第五隐藏层的偏置向量;h4(k)表示k时刻的第四隐藏层输出向量;wh4为第四隐藏层的权值向量,bh4为第四隐藏层的偏置向量;h3(k-1)和h3(k)表示k-1时刻和k时刻的第三隐藏层输出向量;wh31、wh32、wh33和wh22为第三隐藏层的权值向量,bh3为第三隐藏层的偏置向量;h1(k-1)和h1(k)分别为k-1时刻和k时刻的迟滞算子输出向量;αi为上升切换阈值向量,βj为下降切换阈值向量;k(k)为k时刻的形状函数层输出向量,wk为形状函数层的权值向量,bk为形状函数层的偏置向量;h2(k)表示k时刻的第二隐藏层输出向量;wh21和wh22为第二隐藏层的权值向量,bh2为第二隐藏层的偏置向量。
11、与现有技术相比,本发明针对工业机器人柔性关节在运动过程中表现出的非对称、速率相关及强非线性的复杂迟滞特性,先通过设计非对称非线性迟滞函数作为preisach模型迟滞算子,描述柔性关节的非对称特性;再在preisach模型的输入端加入输出历史信息,在preisach模型的输出端加入惯性滤波环节,描述柔性关节的速率相关特性;后将改进的preisach模型与实现非线性映射的全连接神经网络串联构成一种深度神经网络迟滞模型,用于描述随负载变化的扭矩与扭转角的变化规律。基于上述深度神经网络迟滞模型得到角度预测值,通过前馈补偿控制,修正机器人柔性关节的角度设定值,间接消除扭转角的影响,达到提高工业机器人柔性关节的执行精度的目的。
技术特征:
1.一种工业机器人柔性关节扭转角的前馈补偿控制方法,其特征是,包括步骤如下:
2.根据权利要求1所述的一种工业机器人柔性关节扭转角的前馈补偿控制方法,其特征是,步骤1中,深度神经网络迟滞模型的数学表示为:
技术总结
本发明公开一种工业机器人柔性关节扭转角的前馈补偿控制方法,先通过设计非对称非线性迟滞函数作为Preisach模型迟滞算子,描述柔性关节的非对称特性;再在Preisach模型的输入端加入输出历史信息,在Preisach模型的输出端加入惯性滤波环节,描述柔性关节的速率相关特性;后将改进的Preisach模型与实现非线性映射的全连接神经网络串联构成一种深度神经网络迟滞模型,用于描述随负载变化的扭矩与扭转角的变化规律。基于上述深度神经网络迟滞模型得到角度预测值,通过前馈补偿控制,修正机器人柔性关节的角度设定值,间接消除扭转角的影响,达到提高工业机器人柔性关节的执行精度的目的。
技术研发人员:党选举,李晓,芮华,原翰玫,黄品高,张斌,龙诗科
受保护的技术使用者:桂林电子科技大学
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!