基于输入受限的机械臂跟踪控制方法、系统、设备及介质
本发明涉及智能控制,尤其涉及一种基于输入受限的机械臂跟踪控制方法、系统、设备及介质。
背景技术:
1、本部分的陈述仅仅是提供了与本发明相关的背景技术信息,不必然构成在先技术。
2、随着科技的不断进步,针对机械臂的智能控制研究愈发成熟,从而也对机械臂的控制精度有了更高的标准。为了提高机械臂的控制精度,通常需要对性能指标提出要求,因此,在控制器设计过程中结合预设性能指标进行控制具有重要意义。最优控制是一类考虑系统控制性能和节能效应的控制策略,机械臂的运动过程属于高度耦合的非线性系统,这给传统的最优控制方法带来了巨大的挑战。并且在工业生产中,由于电压,天气,温度等许多现实因素的影响,输入往往并不是对称的,要提升机械臂系统应用的的安全性,不得不将非对称输入限制列入考虑。
3、因此,如何在机械臂控制过程中满足预设性能指标约束且考虑非对称输入限制实现最优控制成为亟待解决的问题。
技术实现思路
1、针对现有技术存在的不足,本发明的目的是提供一种基于输入受限的机械臂跟踪控制方法、系统、设备及介质,旨在解决现有机械臂控制方法无法在满足预设性能指标约束并克服非对称输入限制的同时实现最优控制的技术问题。
2、为了实现上述目的,本发明是通过如下的技术方案来实现:
3、本发明第一方面提供了一种基于输入受限的机械臂跟踪控制方法,包括以下步骤:
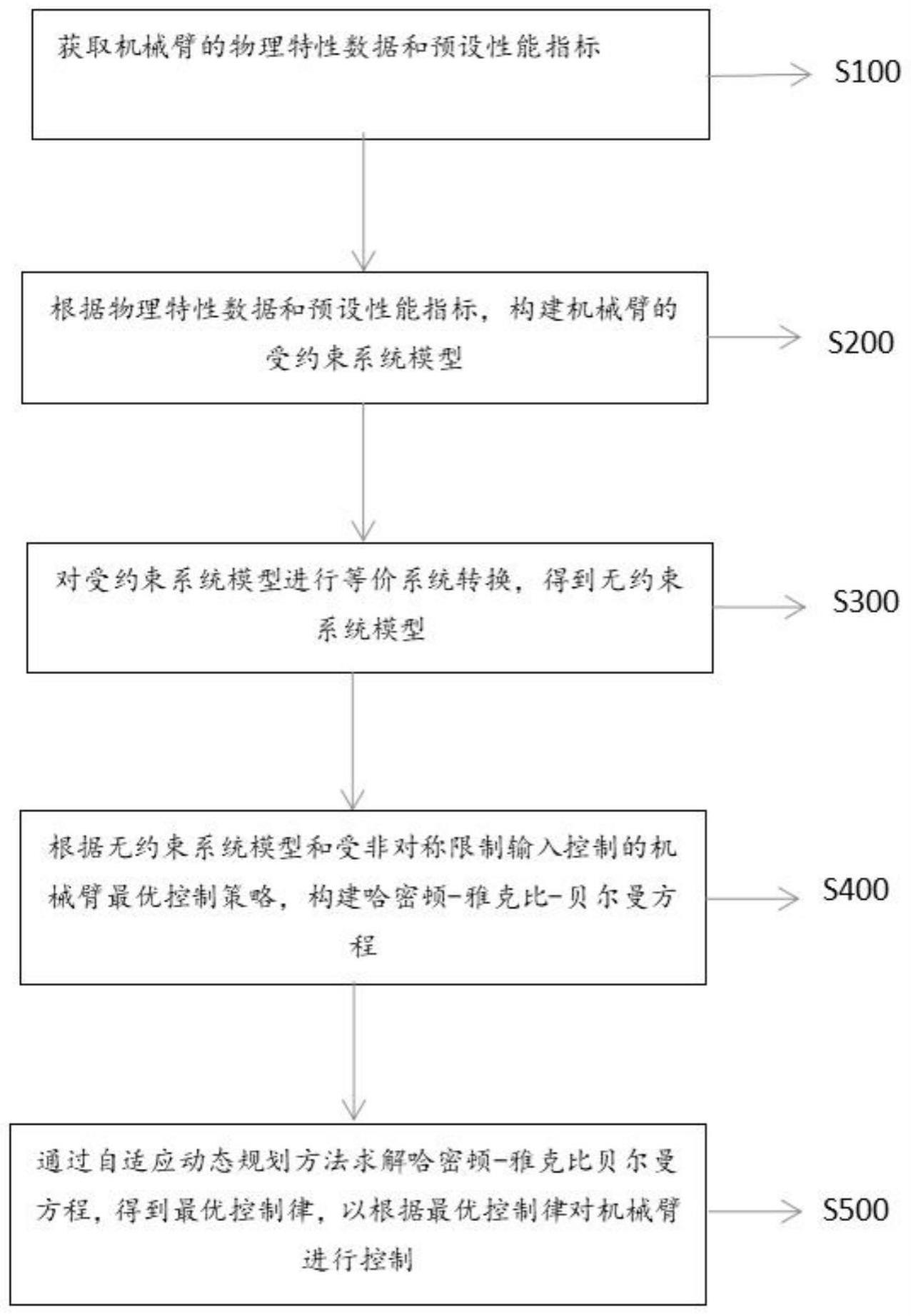
4、获取机械臂的物理特性数据和预设性能指标;
5、根据物理特性数据和预设性能指标,构建机械臂的受约束系统模型;
6、对受约束系统模型进行等价系统转换,得到无约束系统模型;
7、根据无约束系统模型和机械臂的最优控制策略,构建哈密顿-雅克比-贝尔曼方程;其中,最优控制策略为受非对称输入限制的机械臂的最优控制策略;
8、通过自适应动态规划方法求解所述哈密顿-雅克比-贝尔曼方程,得到最优控制律,以根据所述最优控制律对所述机械臂进行控制。
9、进一步的,所述根据物理特性数据和预设性能指标,构建机械臂的受约束系统模型的具体步骤为:
10、根据物理特性数据建立机械臂的状态空间方程;
11、根据预设性能指标定义预设性能函数;
12、根据状态空间方程和预设性能函数构建受约束系统模型。
13、更进一步的,所述根据物理特性数据建立机械臂的状态空间方程的具体步骤为:
14、对物理特性数据进行建模得到机械臂的动力学模型;
15、根据机械臂的物理特性对动力学模型进行转换,得到机械臂的状态空间方程。进一步的,所述根据无约束系统模型和机械臂的最优控制策略,构建哈密顿-雅克比-贝尔曼方程的具体步骤为:
16、根据无约束系统模型和所述受非对称输入限制机械臂的最优控制策略定义代价函数;
17、根据代价函数构建哈密顿-雅克比-贝尔曼方程。
18、更进一步的,所述根据无约束系统模型和所述受非对称输入限制机械臂的最优控制策略定义代价函数的具体步骤为:
19、根据无约束系统模型定义位置跟踪误差,得到增广状态和因非对称输入设计的正定项;
20、结合增广状态、因非对称输入设计的正定项和机械臂的最优控制策略,定义代价函数。
21、更进一步的,所述根据代价函数构建哈密顿-雅克比-贝尔曼方程的具体步骤为:
22、根据代价函数定义哈密顿函数和最优代价函数;
23、利用贝尔曼最优原则求解所述最优代价函数,得到最优代价函数的最优解;
24、将最优解代入哈密顿函数,得到哈密顿-雅克比-贝尔曼方程。
25、进一步的,采用基于神经网络架构的自适应动态规划方法求解所述哈密顿-雅克比-贝尔曼方程,得到最优控制律。
26、本发明第二方面提供了一种基于输入受限的机械臂跟踪控制系统,包括:
27、数据获取模块,用于获取机械臂的物理特性数据和预设性能指标;
28、模型构建模块,用于根据物理特性数据和预设性能指标,构建机械臂的受约束系统模型;
29、系统转换模块,用于对受约束系统模型进行等价系统转换,得到无约束系统模型;
30、方程构建模块,用于根据无约束系统模型和机械臂的最优控制策略,构建哈密顿-雅克比-贝尔曼方程;其中,最优控制策略为受非对称输入限制的机械臂的最优控制策略;
31、最优控制模块,用于通过自适应动态规划方法求解所述哈密顿-雅克比-贝尔曼方程,得到最优控制律,以根据所述最优控制律对所述机械臂进行控制。
32、本发明第三方面提供了一种设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的程序,所述处理器执行所述程序时实现如本发明第一方面所述的基于输入受限的机械臂跟踪控制方法中的步骤。
33、本发明第四方面提供了一种介质,其上存储有程序,该程序被处理器执行时实现如本发明第一方面所述的基于输入受限的机械臂跟踪控制方法中的步骤。
34、以上一个或多个技术方案存在以下有益效果:
35、本发明公开了一种基于输入受限的机械臂跟踪控制方法、系统、设备及介质,充分分析了预设性能指标的约束条件,并在控制过程中考虑了非对称输入限制,在保证预设性能指标的基础上进行最优控制,实现了对机械臂的高精度控制。本发明的方法可以使得机械臂的系统输出有效跟踪参考信号,并使得跟踪误差等满足预设要求,提高了控制精度,并克服了机械臂现实场景可能面临的非对称输入受限问题,还具有节能效应。
36、本发明附加方面的优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本发明的实践了解到。
技术特征:
1.一种基于输入受限的机械臂跟踪控制方法,其特征在于,包括以下步骤:
2.如权利要求1所述的基于输入受限的机械臂跟踪控制方法,其特征在于,
3.如权利要求2所述的基于输入受限的机械臂跟踪控制方法,其特征在于,
4.如权利要求1所述的基于输入受限的机械臂跟踪控制方法,其特征在于,
5.如权利要求4所述的基于输入受限的机械臂跟踪控制方法,其特征在于,
6.如权利要求4所述的基于输入受限的机械臂跟踪控制方法,其特征在于,
7.如权利要求1所述的基于输入受限的机械臂跟踪控制方法,其特征在于,
8.一种基于输入受限的机械臂跟踪控制系统,其特征在于,包括:
9.一种计算机可读存储介质,其特征在于,其中存储有多条指令,所述指令适于由终端设备的处理器加载并执行权利要求1-7中任一项所述的基于输入受限的机械臂跟踪控制方法。
10.一种终端设备,其特征在于,包括处理器和计算机可读存储介质,处理器用于实现各指令;计算机可读存储介质用于存储多条指令,所述指令适于由处理器加载并执行权利要求1-7中任一项所述的基于输入受限的机械臂跟踪控制方法。
技术总结
本发明公开了一种基于输入受限的机械臂跟踪控制方法、系统、设备及介质,涉及智能控制技术领域。该方法包括步骤:获取机械臂的物理特性数据和预设性能指标;根据物理特性数据和预设性能指标,构建机械臂的受约束系统模型;对受约束系统模型进行等价系统转换,得到无约束系统模型;根据无约束系统模型和机械臂的最优控制策略,构建哈密顿‑雅克比‑贝尔曼方程;通过自适应动态规划方法求解所述哈密顿‑雅克比‑贝尔曼方程,得到最优控制律,以根据所述最优控制律对所述机械臂进行控制。本发明解决了现有机械臂控制方法无法在满足预设性能指标约束并克服非对称输入限制的同时实现最优控制的技术问题。
技术研发人员:周琪,张兴怡,郭子杰,马慧,李鸿一,鲁仁全
受保护的技术使用者:广东工业大学
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!