基于机器人视觉的目标用户确定方法、装置和电子装置与流程
本申请涉及人工智能领域,特别是涉及基于机器人视觉的目标用户确定方法、装置和电子装置。
背景技术:
1、服务型机器人主要用于与用户进行沟通交流,一般情况下,用户语音输入指令后,然后机器人根据用户语音输入的指令实施特定的行为或与用户进行交流。
2、当有众多用户围绕机器人并向机器人发出语音指令后,机器人出于礼貌,会看向vip用户,并且会优先回答vip用户的问题,优先听从vip用户的指令,以提升vip用户的体验感,但是机器人在众多用户中找到vip用户比较困难。
3、针对相关技术中存在机器人在众多用户中找到vip用户比较困难的问题,目前还没有提出有效的解决方案。
技术实现思路
1、在本实施例中提供了一种基于机器人视觉的目标用户确定方法、装置和电子装置,以解决相关技术中机器人在众多用户中找到vip用户比较困难的问题。
2、第一个方面,在本实施例中提供了一种基于机器人视觉的目标用户确定方法,所述方法包括:
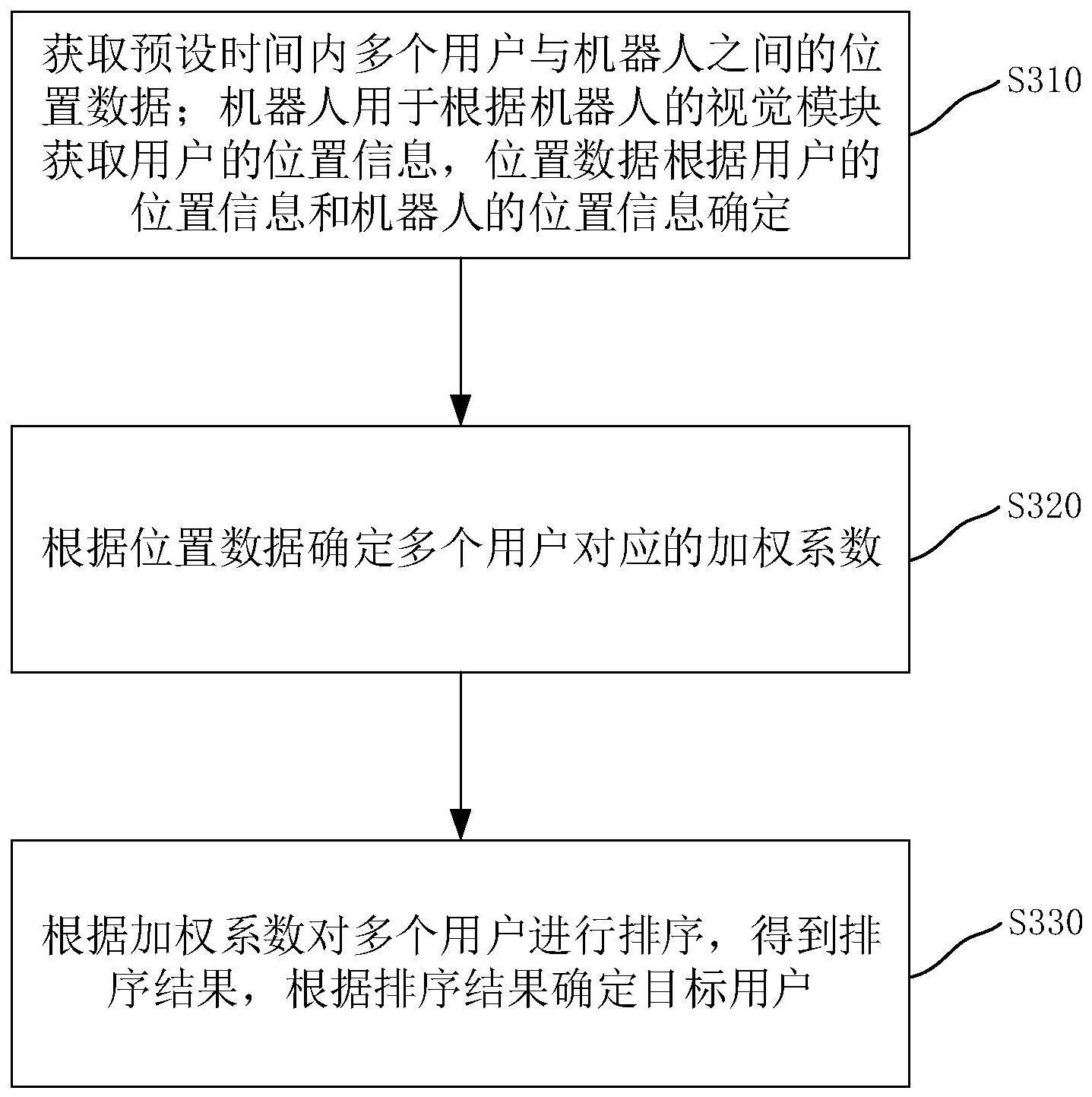
3、获取预设时间内多个用户与机器人之间的位置数据;所述机器人用于根据机器人的视觉模块获取用户的位置信息,所述位置数据根据所述用户的位置信息和所述机器人的位置信息确定;
4、根据所述位置数据确定多个所述用户对应的加权系数;
5、根据所述加权系数对多个所述用户进行排序,得到排序结果,根据所述排序结果确定目标用户。
6、在其中的一些实施例中,所述获取预设时间内多个用户与机器人之间的位置数据,包括:
7、预设采集位置信息的频率,并根据所述频率,采集多个用户的位置信息;
8、根据所述机器人的位置信息和多个所述用户的位置信息,确定多个所述用户与所述机器人之间的位置数据;所述位置数据包括所述用户与所述机器人之间的距离和所述用户与所述机器人的角度;
9、确定多个所述用户的用户标识,并构建多个所述用户的信息集合;其中,所述用户标识唯一,所述信息集合包括所述用户标识和所述用户标识对应的用户的位置信息。
10、在其中的一些实施例中,所述根据所述机器人的位置信息和多个所述用户的位置信息,确定多个所述用户与所述机器人之间的位置数据,包括:
11、以机器人的位置坐标为原点构建坐标系;
12、所述用户的位置信息包括以机器人的位置坐标为原点构建的坐标系下的用户坐标;
13、根据所述机器人的位置坐标和所述用户坐标,确定所述用户与所述机器人之间的位置数据。
14、在其中的一些实施例中,所述根据所述机器人的位置坐标和所述用户坐标,确定所述用户与所述机器人之间的位置数据,包括:
15、根据所述用户坐标,确定所述用户与所述机器人之间的距离;
16、根据所述用户坐标对应的向量和预设的机器人的方向向量,确定所述用户与所述机器人的角度;
17、确定所述用户与所述机器人之间的距离和所述用户与所述机器人的角度为所述用户与所述机器人之间的位置数据。
18、在其中的一些实施例中,所述根据所述位置数据确定多个所述用户对应的加权系数,包括:
19、根据多个所述用户的信息集合,确定在预设时间点的多个所述用户与所述机器人之间的距离;
20、将多个所述用户与所述机器人之间的距离进行排序,得到排序结果;
21、根据所述排序结果确定多个所述用户对应的第一加权系数。
22、在其中的一些实施例中,所述根据所述位置数据确定多个所述用户对应的加权系数,还包括:
23、根据多个所述用户的信息集合,确定多个所述用户的方向向量;
24、根据预设的机器人的方向向量和所述用户的方向向量,确定所述用户与所述机器人的角度;
25、将多个所述用户与所述机器人的角度进行排序,得到排序结果;
26、根据所述排序结果确定多个所述用户对应的第二加权系数;
27、根据所述第一加权系数与所述第二加权系数,确定多个所述用户的加权系数。
28、在其中的一些实施例中,所述根据所述加权系数对多个所述用户进行排序,得到排序结果,根据所述排序结果确定目标用户,包括:
29、获取在预设时间内不同时刻多个所述用户对应的加权系数,并分别将多个所述用户在预设时间内不同时刻所对应的加权系数进行累加,得到总加权系数;
30、对所述总加权系数进行排序,得到排序结果,并根据所述排序结果确定目标用户。
31、在其中的一些实施例中,所述根据所述加权系数对多个所述用户进行排序,得到排序结果,根据所述排序结果确定目标用户,还包括:
32、当存在多个目标用户时,分别获取多个目标用户的第一加权系数和第二加权系数;
33、预设所述加权系数中的所述第一加权系数和所述第二加权系数的比例,其中,所述第二加权系数的比例大于所述第一加权系数的比例;
34、根据预设的比例,计算多个所述目标用户的加权系数;
35、根据多个所述目标用户的加权系数,计算多个所述目标用户的总加权系数;
36、对多个所述总加权系数进行排序,得到排序结果,并根据排序结果重新确定目标用户。
37、第二个方面,在本实施例中提供了一种基于机器人视觉的目标用户确定装置,所述装置包括:获取模块、处理模块及确定模块;获取模块,用于获取预设时间内多个用户与机器人之间的位置数据;所述机器人用于根据机器人的视觉模块获取用户的位置信息,所述位置数据根据所述用户的位置信息和所述机器人的位置信息确定;
38、处理模块,用于根据所述位置数据确定多个所述用户对应的加权系数;
39、确定模块,用于根据所述加权系数对多个所述用户进行排序,得到排序结果,根据所述排序结果确定目标用户。
40、第三个方面,在本实施例中提供了一种电子装置,包括存储器、处理器以及存储在所述存储器上并可在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现上述第一个方面所述的基于机器人视觉的目标用户确定方法。
41、与相关技术相比,在本实施例中提供的基于机器人视觉的目标用户确定方法,通过获取在预设时间内多个用户的位置信息;根据位置信息确定多个用户对应的加权系数,并根据加权系数对用户进行排序,得到排序结果;进而根据排序结果确定目标用户,有利于机器人更加准确便捷地找到目标用户,并为目标用户服务。
42、本申请的一个或多个实施例的细节在以下附图和描述中提出,以使本申请的其他特征、目的和优点更加简明易懂。
技术特征:
1.一种基于机器人视觉的目标用户确定方法,其特征在于,所述方法包括:
2.根据权利要求1所述的基于机器人视觉的目标用户确定方法,其特征在于,所述获取预设时间内多个用户与机器人之间的位置数据,包括:
3.根据权利要求2所述的基于机器人视觉的目标用户确定方法,其特征在于,所述根据所述机器人的位置信息和多个所述用户的位置信息,确定多个所述用户与所述机器人之间的位置数据,包括:
4.根据权利要求3所述的基于机器人视觉的目标用户确定方法,其特征在于,所述根据所述机器人的位置坐标和所述用户坐标,确定所述用户与所述机器人之间的位置数据,包括:
5.根据权利要求4所述的基于机器人视觉的目标用户确定方法,其特征在于,所述根据所述位置数据确定多个所述用户对应的加权系数,包括:
6.根据权利要求5所述的基于机器人视觉的目标用户确定方法,其特征在于,所述根据所述位置数据确定多个所述用户对应的加权系数,还包括:
7.根据权利要求1所述的基于机器人视觉的目标用户确定方法,其特征在于,所述根据所述加权系数对多个所述用户进行排序,得到排序结果,根据所述排序结果确定目标用户,包括:
8.根据权利要求1所述的基于机器人视觉的目标用户确定方法,其特征在于,所述根据所述加权系数对多个所述用户进行排序,得到排序结果,根据所述排序结果确定目标用户,还包括:
9.一种基于机器人视觉的目标用户确定装置,其特征在于,所述装置包括:获取模块、处理模块及确定模块;获取模块,用于获取预设时间内多个用户与机器人之间的位置数据;所述机器人用于根据机器人的视觉模块获取用户的位置信息,所述位置数据根据所述用户的位置信息和所述机器人的位置信息确定;
10.一种电子装置,包括存储器和处理器,其特征在于,所述存储器中存储有计算机程序,所述处理器被设置为运行所述计算机程序以执行权利要求1至权利要求8中任一项所述的基于机器人视觉的目标用户确定方法。
技术总结
本申请涉及一种基于机器人视觉的目标用户确定方法、装置和电子装置,其中,该基于机器人视觉的目标用户确定方法包括:获取预设时间内多个用户与机器人之间的位置数据;机器人用于根据机器人的视觉模块获取用户的位置信息,位置数据根据用户的位置信息和机器人的位置信息确定;根据位置数据确定多个用户对应的加权系数;根据加权系数对多个用户进行排序得到排序结果,根据排序结果确定目标用户。通过本申请,解决了机器人在众多用户中找到VIP用户比较困难的问题,提高了用户体验感。
技术研发人员:方伟,郑涛,江明俊,谢安桓,吴国藩,贺骥
受保护的技术使用者:之江实验室
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!