基于梯度下降和指数衰减的轮式移动机械臂姿态调整方法
本发明涉及轮式移动机械臂的规划控制领域,尤其是涉及一种梯度下降和指数衰减的轮式移动机械臂姿态调整方法。
背景技术:
1、轮式移动机械臂是一种灵活、高效、可操作的机器人,已广泛应用于物流、服务、海洋、太空等领域。在轮式移动机械臂执行不同的操作任务时,往往需要进行不同姿态之间的调整;即从当前的姿态调整到某个指定或期望的姿态(作为执行操作任务时的起始姿态)。针对轮式移动机械臂的姿态调整,一般是先调整移动平台的姿态,再调整机械臂的关节状态。显然,这样的调整方法存在复杂、耗时、精度低等缺陷。因为要多次测量移动平台的位置和朝向角以及机械臂各个关节的角度,才能保证轮式移动机械臂是准确地到达所指定或期望的姿态来执行相关的操作任务。
2、例如中国专利cn202111142636.6公开了一种基于梯度下降的轮式移动机器人状态调整方法,目前现有技术都是在速度层上进行研究和设计的,这些方案在轮式移动机械臂在执行不同的操作任务时都需要多次测量移动平台和机械臂姿态,过程繁琐且对于姿态的感知与调整相对滞后。如果姿态调整的结果不准确,轮式移动机械臂极有可能无法完成给的操作任务;甚至还会因为出现未知姿态而导致轮式移动机械臂与工作空间中的物体发生碰撞,造成严重的经济损失。
技术实现思路
1、本发明的目的是克服上述现有技术存在的缺陷而提供一种基于梯度下降和指数衰减的轮式移动机械臂姿态调整方法。
2、本发明的目的可以通过以下技术方案来实现:
3、作为本发明的第一方面,提供一种基于梯度下降和指数衰减的轮式移动机械臂姿态调整方法,所述轮式移动机械臂包括具有多个驱动轮的移动平台和设于移动平台上的机械臂,所述方法步骤包括:
4、获取轮式移动机械臂姿的状态参数,将状态参数输入预先构建的加速度层姿态调整模型中;
5、求解加速度层姿态调整模型,得到移动平台驱动轮的旋转角度、旋转角速度和旋转角加速度以及机械臂关节的角度、速度和加速度;
6、根据求解结果实时驱动移动平台的驱动轮和机械臂的关节,使轮式移动机械臂从当前的姿态调整到期望的姿态;
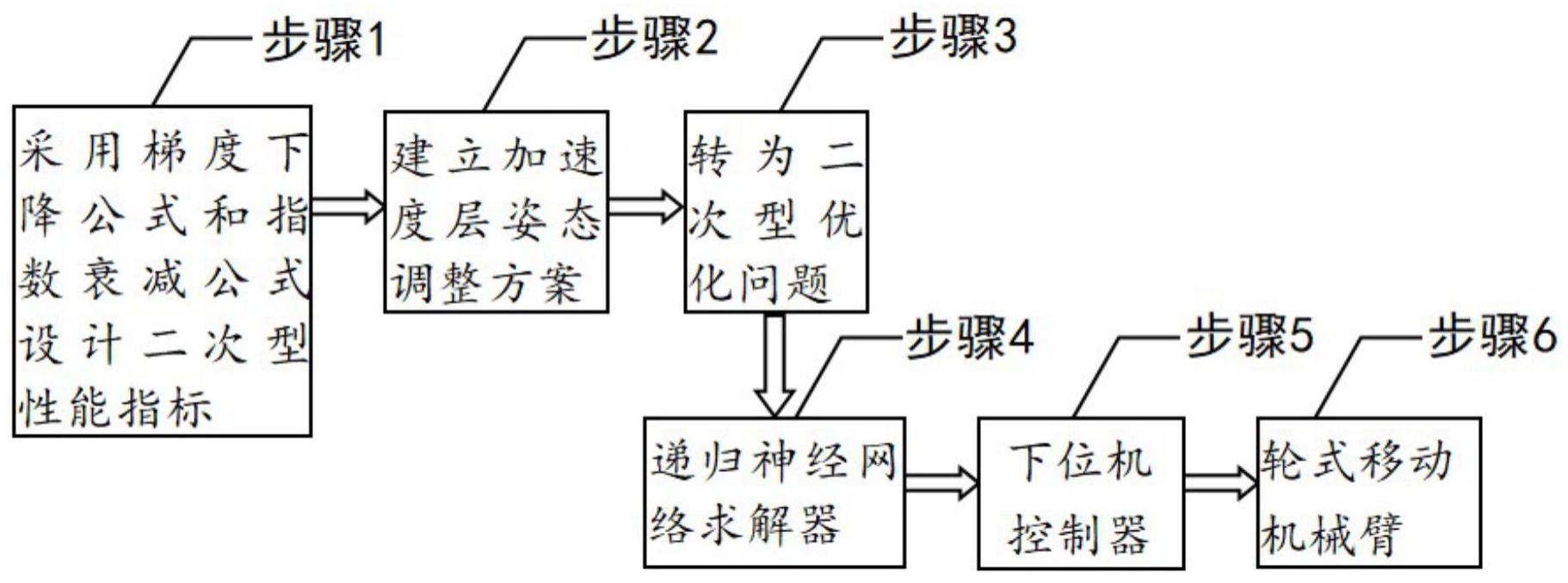
7、所述加速度层姿态调整模型,基于采用梯度下降公式和指数衰减公式推导二次型性能指标,结合移动平台的运动学方程以及轮式移动机械臂的物理极限建立。
8、进一步的,所述采用梯度下降公式和指数衰减公式推导的二次型性能指标表示为:
9、
10、其中,||·||2表示向量的二范数,和表示轮式移动机械臂的联合加速度向量和联合速度向量,和分别表示机械臂关节的加速度和速度,和分别表示移动平台驱动轮旋转角的加速度和速度,n表示安装在移动平台上的机械臂自由度的个数,2表示移动平台驱动轮的个数;d∈r(3+n)×(2+n)和m∈r3+n为系数矩阵,表示d的时间导数;e为增广矩阵,表示轮式移动机械臂当前姿态与期望姿态之间的误差。
11、进一步的,所述系数矩阵d表达式如下:
12、d=[a,0;0,in]∈r(3+n)×(2+n)
13、其中,a∈r3×2表示由移动平台结构参数组成的矩阵,in∈rn×n表示单位矩阵;
14、系数矩阵m表达式如下:
15、m=[(λ1+k1)i2,0,0;0,λ2((cos2φ)+sinφsinφd)+k2;0,0,(λ3+k3)in]∈r3+n其中,λi和ki(i=1,2,3)表示实现状态姿态的设计参数,φ∈r表示移动平台的朝向角;
16、增广矩阵e表达式如下:
17、
18、其中,pxy表示移动平台在水平地面上的沿着xy轴方向的坐标,,φd和θd分别表示移动平台在水平地面上沿着xy轴方向上的期望坐标和期望朝向角以及机械臂关节的期望角度。
19、进一步的,所述由移动平台结构参数组成的矩阵a∈r3×2表达式如下:
20、
21、其中,r>0∈r表示移动平台驱动轮的半径,l>0∈r表示两个驱动轮中心点的距离,φ∈r表示移动平台的朝向角。
22、进一步的,所述加速度层姿态调整方案受约束于移动平台的运动学方程以及轮式移动机械臂的物理极限,包括移动平台驱动轮的旋转角度极限、旋转角速度极限和旋转角加速度极限以及机械臂关节的角度极限、机械臂关节速度极限和机械臂关节加速度极限。
23、进一步的,对所述加速度层姿态调整模型进行求解的过程具体如下:
24、将加速度层姿态调整模型转化为二次型优化问题;
25、将二次型优化问题的求解等效转化为分段线性投影方程的求解;
26、采用递归神经网络演化计算得到分段线性投影方程的解,即得到二次型优化问题的最优解。
27、进一步的,所述加速度层姿态调整模型转化为如下的二次型优化问题:
28、最小化:xtqx/2+ptx
29、约束条件:x-≤x≤x+
30、其中,上标t表示矩阵或向量的转置,表示二次型优化问题的决策变量,x±表示x的上下限,并且,η>0∈r和γ>0∈r表示极限转换参数,ε>0∈rn+3表示极限转换裕量,和分别为轮式移动机械臂的增广角度向量、速度向量和加速度向量;相应地,和分别表示u、和的极限;q=dtd∈r(2+n)×(2+n),d=[a,0;0,i]∈r(3+n)×(2+n),
31、进一步的,所述二次型优化问题的求解等效为如下分段线性投影方程:
32、hω(x-(qx+p))-x=0∈r2+n
33、其中,hω(·)表示分段线性投影算子。
34、进一步的,采用所述递归神经网络求解分段线性投影方程具体表示如下:
35、
36、其中,表示x的时间导数,i∈r(2+n)×(2+n)表示单位矩阵,设计参数σ>0∈r用于调节递归神经网络的计算性能。
37、与现有技术相比,本发明具有以下有益效果:
38、1)本发明根据轮式移动机械臂当前姿态与期望姿态之间误差最小化的思想,并采用梯度下降公式和指数衰减公式推导得到的在加速度层上描述的二次型性能指标,并结合移动平台的运动学方程以及轮式移动机械臂的物理极限建立相应的加速度层姿态调整模型。本发明方案在加速度层上有效地实现了移动平台和机械臂在不同姿态之间的同时自动调整,能够避免轮式移动机械臂在执行不同的操作任务时都需要多次测量移动平台和机械臂姿态的繁琐过程。
39、2)本发明采用递归神经网络对二次型优化问题进行求解得到移动平台双轮的旋转角度、旋转角速度和旋转角加速度以及机械臂关节的角度、速度和加速度,能够使得轮式移动机械臂在执行不同操作任务时快速、精确地达到任务指定的初始姿态。
技术特征:
1.一种基于梯度下降和指数衰减的轮式移动机械臂姿态调整方法,所述轮式移动机械臂包括具有多个驱动轮的移动平台和设于移动平台上的机械臂,其特征在于,所述方法步骤包括:
2.根据权利要求1所述的一种基于梯度下降和指数衰减的轮式移动机械臂姿态调整方法,其特征在于,所述采用梯度下降公式和指数衰减公式推导的二次型性能指标表示为:
3.根据权利要求2所述的一种基于梯度下降和指数衰减的轮式移动机械臂姿态调整方法,其特征在于,所述系数矩阵d表达式如下:
4.根据权利要求3所述的一种基于梯度下降和指数衰减的轮式移动机械臂姿态调整方法,其特征在于,所述由移动平台结构参数组成的矩阵a∈r3×2表达式如下:
5.根据权利要求1所述的一种基于梯度下降和指数衰减的轮式移动机械臂姿态调整方法,其特征在于,所述加速度层姿态调整方案受约束于移动平台的运动学方程以及轮式移动机械臂的物理极限,包括移动平台驱动轮的旋转角度极限、旋转角速度极限和旋转角加速度极限以及机械臂关节的角度极限、机械臂关节速度极限和机械臂关节加速度极限。
6.根据权利要求1所述的一种基于梯度下降和指数衰减的轮式移动机械臂姿态调整方法,其特征在于,对所述加速度层姿态调整模型进行求解的过程具体如下:
7.根据权利要求6所述的一种基于梯度下降和指数衰减的轮式移动机械臂姿态调整方法,其特征在于,所述加速度层姿态调整模型转化为如下的二次型优化问题:
8.根据权利要求7所述的一种基于梯度下降和指数衰减的轮式移动机械臂姿态调整方法,其特征在于,所述二次型优化问题的求解等效为如下分段线性投影方程:
9.根据权利要求8所述的一种基于梯度下降和指数衰减的轮式移动机械臂姿态调整方法,其特征在于,采用所述递归神经网络求解分段线性投影方程具体表示如下:
技术总结
本发明涉及一种基于梯度下降和指数衰减的轮式移动机械臂姿态调整方法,方法步骤包括:获取轮式移动机械臂姿的状态参数,将状态参数输入预先构建的加速度层姿态调整模型中;求解加速度层姿态调整模型;根据求解结果实时驱动移动平台的驱动轮和机械臂的关节,使轮式移动机械臂从当前姿态调整到期望的姿态;其中加速度层姿态调整模型基于采用梯度下降公式和指数衰减公式推导二次型性能指标结合移动平台的运动学方程以及轮式移动机械臂的物理极限建立。本发明在加速度层上实现了移动平台和机械臂在不同姿态之间的同时自动调整,避免轮式移动机械臂在执行不同的操作任务时需多次测量移动平台和机械臂姿态的繁琐过程。
技术研发人员:仓乃梦,陈树康,郭东生,张卫东,吴迪,贾泽华,曹刚,陆海博,张俊峰,毋媛媛,张永辉,唐浩,刘炳言,张安民
受保护的技术使用者:海南大学
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!