一种机器人欠驱动多模式自适应夹持器
本发明涉及机器人用夹持机构,具体为一种机器人欠驱动多模式自适应夹持器。
背景技术:
1、目前机器人欠驱动夹持器在工业自动化、农业采摘、医疗康复等领域具有广泛的应用前景。
2、针对上述中的相关技术,发明人认为现有的机器人抓取机构在使用过程中往往对规则的物品夹持非常稳定,但是遇到外形不规则或者柔软易变形的物体往往很难稳定的夹持使用,对于非规则外形物体,因此传统的平动式与张角式夹持器存在夹持接触面积小、抓取不稳定等一系列问题,从而导致抓取安全性与通用性受限。
技术实现思路
1、为了达到对非规则物体稳定安全夹持的效果,本申请提供一种机器人欠驱动多模式自适应夹持器。
2、本发明是这样实现的:
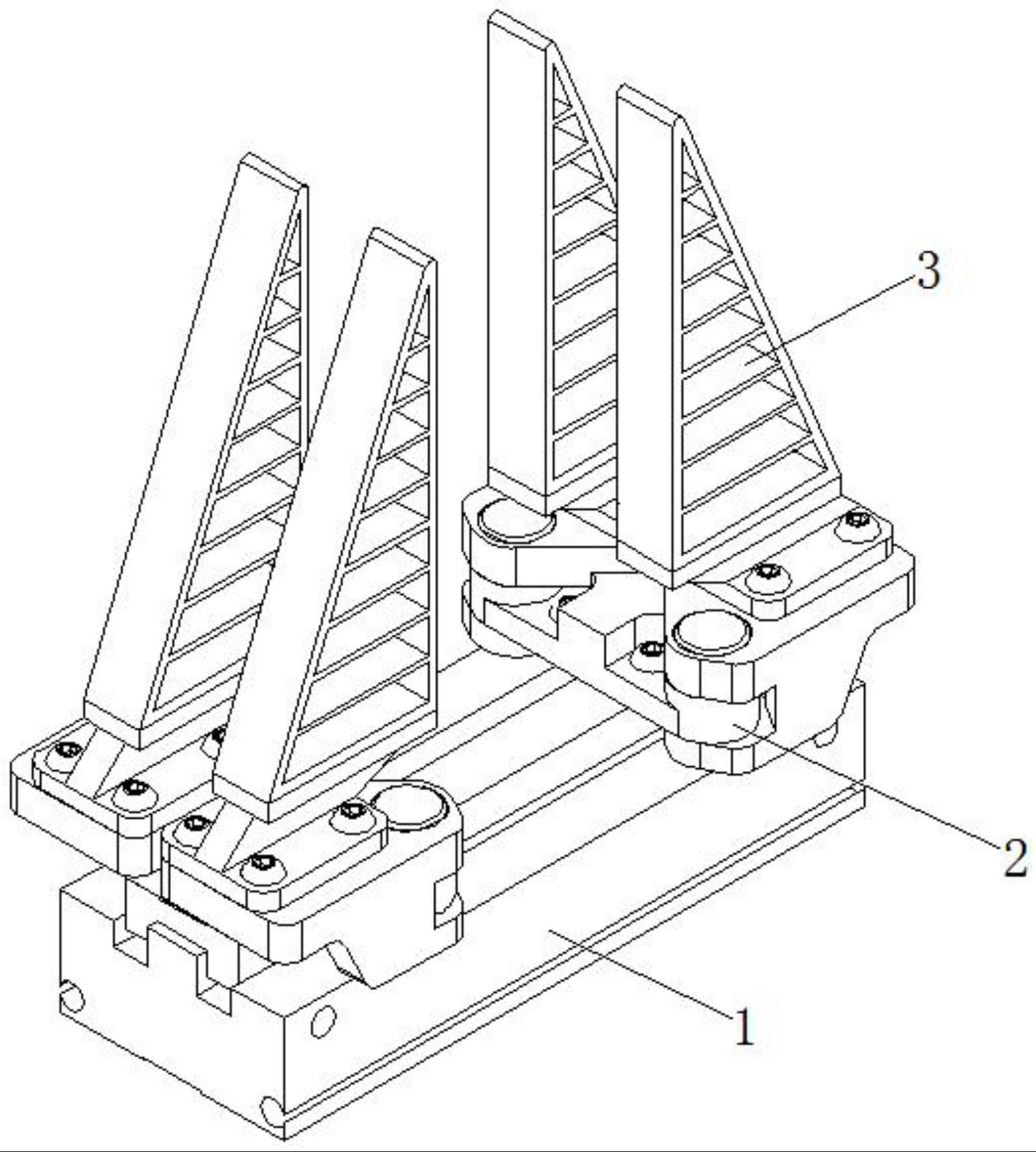
3、一种机器人欠驱动多模式自适应夹持器,包括:
4、底座,所述底座包括滑轨座和活动滑块,所述活动滑块对称安装在滑轨座上,且活动滑块与滑轨座水平滑动连接;
5、夹持基座,所述夹持基座包括固定座和摆动块,所述固定座固定安装在滑块的上端面,所述摆动块对称安装在固定座上,且摆动块与固定座转动连接;
6、手指架,所述手指架安装在摆动块的上端面,且手指架通过螺栓与摆动块固定连接;以及
7、复位机构,所述复位机构安装在固定座的中部,且复位机构头部与摆动块的末端固定连接。
8、通过采用上述技术方案,通过对底座的结构设置来保证通过滑轨座来滑动安装活动滑块,方便通过活动滑块来进行安装夹持基座,易于通过活动滑块来带动两端的夹持基座同步开合使用,通过对夹持基座的结构设置来保证通过一个固定座来对称安装两个摆动块,方便摆动块可以在固定座上转动安装使用,进而通过摆动块带动手指架在夹持使用的时候可以灵活调节夹持角度,通过对手指架的设置来方便在夹持的时候可以直接贴合的待夹持物品的表面,同时易于手指架可以根据物品表面进行更好的贴合。
9、进一步的,所述固定座包括座板和销轴,所述销轴对称安装在座板的两端,且销轴与座板垂直固定连接。
10、通过采用上述技术方案,通过对固定座的结构设置来保证通过座板来安装销轴,方便通过销轴来进行连接夹持基座,方便夹持基座可以在座板上转动安装使用。
11、进一步的,所述座板的下端面设置若干与活动滑块连接的定位管,所述定位管的下端面与销轴的下端面平齐,且定位管与座板固定连接。
12、通过采用上述技术方案,通过在座板的下端面固定安装定位管,方便座板安装在活动滑块上以后可以通过定位管来与螺纹安装孔进行对应,方便通过螺栓来进行固定安装。
13、进一步的,所述座板上端面的中部设置有定位块,所述定位块与座板一体成型,且定位块的头部对称开设有支撑摆动块的复位斜面。
14、通过采用上述技术方案,通过在座板上端面的中部安装定位块,方便通过定位块两侧的复位斜面可以对摆动块的位置进行限位,保证不受外力的情况下两侧摆动块可以支撑在定位块上。
15、进一步的,所述摆动块包括顶板和弯折板,所述弯折板设置在顶板的下端面,且弯折板与顶板一体成型,所述顶板和弯折板分别安装在座板的上下两端,且顶板和弯折板均与销轴转动连接。
16、通过采用上述技术方案,通过对摆动块的结构设置来保证顶板和弯折板可以夹持在座板的上下两端,同时通过对销轴来将两者相互配合连接,易于摆动块可以稳定转动调节使用。
17、进一步的,所述手指架包括三角框和水平支板,所述水平支板由上到下均匀的设置在三角框中,且水平支板与三角框固定连接。
18、通过采用上述技术方案,通过对手指架的结构设置来保证通过三角框来安装水平支板,方便通过水平支板来增加三角框夹持物品时候的夹持强度,易于更加稳定的夹持使用。
19、进一步的,所述三角框包括直角内板和倾斜外板,所述倾斜外板设置在直角内板的外侧面上,且倾斜外板的两端分别与直角内板的两端相连接。
20、通过采用上述技术方案,通过对三角框的结构设置来保证直角内板和倾斜外板组成直角三角形结构,保证三角框整体夹持过程中的稳定性,同时直角内板的竖直边来作为夹持边,方便夹持使用的时候可以通过直角内板来直接贴合在物品上进行夹持。
21、进一步的,所述直角内板的下端面设置有与顶板相连接的托板,所述托板与直角内板固定连接,且托板的外侧面上还一体成型设置有外延耳板。
22、通过采用上述技术方案,通过在托板上固定安装外延耳板,方便通过外延耳板固定安装顶板的上端面,这样就可以保证直角内板可以跟随顶板同步转动调节夹持角度。
23、进一步的,所述复位机构包括收纳套管、拉伸弹簧和连接板,所述收纳套管固定安装在座板的上端面,所述拉伸弹簧对称安装在收纳套管的两侧,且拉伸弹簧一端固定安装在收纳套管中,所述连接板固定安装在拉伸弹簧的另一端。
24、通过采用上述技术方案,通过对复位机构的结构设置来保证收纳套管固定安装在座板的上端面,方便通过收纳套管来进行安装拉伸弹簧,易于两端的拉伸弹簧可以通过连接板来与顶板进行连接,保证顶板在不受外力的情况下可以实现稳定复位的目的。
25、进一步的,所述活动滑块的上端面开设有螺纹安装孔,所述固定座上开设有与螺纹安装孔相对应的连接孔,且固定座通过螺栓与螺纹安装孔相连接。
26、通过采用上述技术方案,通过在活动滑块的上端面开设有螺纹安装孔和在固定座上的连接孔,方便通过螺栓来进行连接固定。
27、与现有技术相比,本发明的有益效果是:
28、(1)本发明通过在滑轨座上滑动安装活动滑块,方便通过两端的活动滑块来带动夹持基座和手指架实现滑动夹持作业,同时通过固定座来转动安装摆动块,方便在夹持的时候可以通过摆动块来调整手指架的夹持角度,易于手指架可以在夹持的时候可以自动适应待夹持物品的表面,易于更好的对物品进行包裹抓取作业,进而实现设备可以具备多模式抓取能力,包括平行抓取和包裹抓取,同时在自适应抓取能力,结构能够自动贴合抓取物体外表面,无需额外传感器检测与控制手段,抓取控制简单可靠。
29、(2)本发明通过在两端的摆动块之间安装复位机构,方便在不受外力的时候在拉伸弹簧的作用下可以将摆动块贴合在定位块上,这样就可以保证两侧手指架的初始位置处于平行位置,这样便于更好的进行夹持使用,从而实现方便夹持使用的目的。
30、(3)本发明通过在三角框中安装水平支板,方便通过水平支板来增加三角框的支撑强度,保证直角内板在对物品夹持的时候更加稳定,从而实现对不同物品稳定夹持固定的目的。
技术特征:
1.一种机器人欠驱动多模式自适应夹持器,其特征在于,包括:
2.根据权利要求1所述的一种机器人欠驱动多模式自适应夹持器,其特征在于,所述固定座(21)包括座板(211)和销轴(212),所述销轴(212)对称安装在座板(211)的两端,且销轴(212)与座板(211)垂直固定连接。
3.根据权利要求2所述的一种机器人欠驱动多模式自适应夹持器,其特征在于,所述座板(211)的下端面设置若干与活动滑块(12)连接的定位管(213),所述定位管(213)的下端面与销轴(212)的下端面平齐,且定位管(213)与座板(211)固定连接。
4.根据权利要求3所述的一种机器人欠驱动多模式自适应夹持器,其特征在于,所述座板(211)上端面的中部设置有定位块(23),所述定位块(23)与座板(211)一体成型,且定位块(23)的头部对称开设有支撑摆动块(22)的复位斜面(231)。
5.根据权利要求4所述的一种机器人欠驱动多模式自适应夹持器,其特征在于,所述摆动块(22)包括顶板(221)和弯折板(222),所述弯折板(222)设置在顶板(221)的下端面,且弯折板(222)与顶板(221)一体成型,所述顶板(221)和弯折板(222)分别安装在座板(211)的上下两端,且顶板(221)和弯折板(222)均与销轴(212)转动连接。
6.根据权利要求5所述的一种机器人欠驱动多模式自适应夹持器,其特征在于,所述手指架(3)包括三角框(31)和水平支板(32),所述水平支板(32)由上到下均匀的设置在三角框(31)中,且水平支板(32)与三角框(31)固定连接。
7.根据权利要求6所述的一种机器人欠驱动多模式自适应夹持器,其特征在于,所述三角框(31)包括直角内板(311)和倾斜外板(312),所述倾斜外板(312)设置在直角内板(311)的外侧面上,且倾斜外板(312)的两端分别与直角内板(311)的两端相连接。
8.根据权利要求7所述的一种机器人欠驱动多模式自适应夹持器,其特征在于,所述直角内板(311)的下端面设置有与顶板(221)相连接的托板(33),所述托板(33)与直角内板(311)固定连接,且托板(33)的外侧面上还一体成型设置有外延耳板(331)。
9.根据权利要求8所述的一种机器人欠驱动多模式自适应夹持器,其特征在于,所述复位机构(4)包括收纳套管(41)、拉伸弹簧(42)和连接板(43),所述收纳套管(41)固定安装在座板(211)的上端面,所述拉伸弹簧(42)对称安装在收纳套管(41)的两侧,且拉伸弹簧(42)一端固定安装在收纳套管(41)中,所述连接板(43)固定安装在拉伸弹簧(42)的另一端。
10.根据权利要求1-9中任意一项所述的一种机器人欠驱动多模式自适应夹持器,其特征在于,所述活动滑块(12)的上端面开设有螺纹安装孔(121),所述固定座(21)上开设有与螺纹安装孔(121)相对应的连接孔(214),且固定座(21)通过螺栓与螺纹安装孔(121)相连接。
技术总结
本发明公开了一种机器人欠驱动多模式自适应夹持器,包括:底座,所述底座包括滑轨座和活动滑块,所述活动滑块对称安装在滑轨座上,且活动滑块与滑轨座水平滑动连接;夹持基座,所述夹持基座包括固定座和摆动块,所述固定座固定安装在滑块的上端面,所述摆动块对称安装在固定座上,且摆动块与固定座转动连接。本发明通过在滑轨座上滑动安装活动滑块,方便通过两端的活动滑块来带动夹持基座和手指架实现滑动夹持作业,同时通过固定座来转动安装摆动块,方便在夹持的时候可以通过摆动块来调整手指架的夹持角度,易于手指架可以在夹持的时候可以自动适应待夹持物品的表面。
技术研发人员:华洪良,吴小锋,雷德福,李超峰,杨阳
受保护的技术使用者:常州工学院
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!