核电站智能巡检的机器人系统和巡检机器人的制作方法
本申请属于核电,具体涉及一种核电站智能巡检的机器人系统和巡检机器人。
背景技术:
1、核电站核岛内存在大量辐照区域,部分厂房的恶劣环境如高温、噪声、辐射等都会对人体健康产生不利影响,人工巡检的方式不利于长期有效的设备检测。因而,如何利用机器人系统智能巡检替代人工巡检成为人们研发的热点。
2、机器人系统中的巡检机器人通常需要长期待在环境恶劣的核电站厂房内,然而,现有的巡检机器人的待机时间和工作时间较短,难以满足核电站智能巡检的需求,因而如何尽可能延长其待机时间和工作时间成为亟待解决的问题。
技术实现思路
1、有鉴于此,本申请实施例致力于提供一种核电站智能巡检的机器人系统和巡检机器人,通过设置机器人系统中巡检机器人的各模块和/或各传感器在未执行工作时处于休眠状态,在执行工作时处于工作状态,从而最大程度地节约了巡检机器人的功耗,因而延长了巡检机器人的待机时间和工作时间。
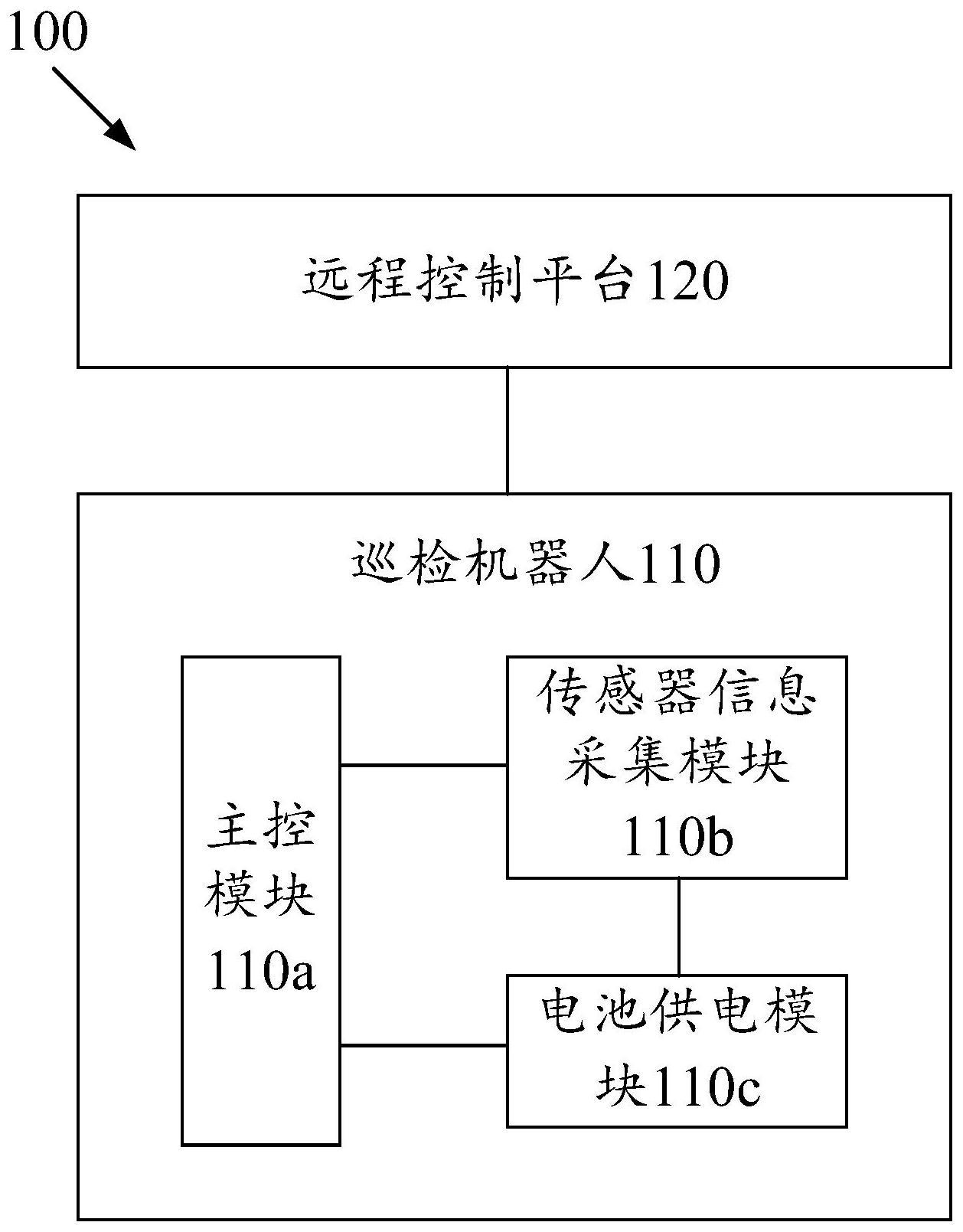
2、本申请第一方面提供了一种核电站智能巡检的机器人系统,该机器人系统包括巡检机器人和与巡检机器人无线通信连接的远程控制平台。远程控制平台配置为向巡检机器人发送用于在核电站内执行巡检任务的巡检指令。巡检机器人包括主控模块、传感器信息采集模块和电池供电模块,电池供电模块配置为向主控模块和传感器信息采集模块供电,传感器信息采集模块包括温度传感器、湿度传感器、速度传感器、辐射剂量传感器和电磁干扰传感器中的任意多种传感器。多种传感器均具有休眠状态和工作状态。主控模块配置为接收巡检指令,并根据巡检指令中的巡检任务从多种传感器中选择巡检任务对应的传感器,并将巡检任务对应的传感器从休眠状态切换为工作状态。
3、在上述方案中,通过设置巡检机器人中的主控模块能够结合巡检任务将巡检任务对应的传感器从休眠状态切换为工作状态,与巡检任务无关的传感器则仍处于休眠状态,从而使得巡检机器人的整体功耗最低,最大限度地保证了巡检机器人的待机时间和工作时间。
4、在本申请一个具体实现方式中,传感器信息采集模块还包括定位传感器,定位传感器包括陀螺仪和无线定位模块。陀螺仪配置为测量巡检机器人的线运动参数和角运动参数,并根据巡检机器人的线运动参数和角运动参数确定巡检机器人的相对位置信息。无线定位模块配置为根据巡检机器人接收到的核电站内的最大基站信号确定最大基站信号对应的基站,并根据基站的位置信息确定巡检机器人的绝对位置信息。
5、在本申请一个具体实现方式中,巡检机器人还包括存储模块和数据传输接口,巡检机器人具有在线巡检模式和离线巡检模式,主控模块还配置为在巡检任务的任务紧急程度为紧急时,控制巡检机器人处于在线巡检模式,并将在线巡检的数据通过数据传输接口传输到远程控制平台,在巡检任务的任务紧急程度为一般时,控制巡检机器人处于离线巡检模式,并将离线巡检的数据保存在存储模块。
6、在本申请一个具体实现方式中,传感器信息采集模块还包括灰度传感器,灰度传感器由红外发射二极管、光敏接收三极管和常开继电器构成。在巡检机器人识别限制进入区域时,若红外发射二极管发出的红外光线被反射回来的强度超过预设强度,则光敏接收三极管达到饱和并输出电信号,电信号输出至常开继电器以使常开继电器闭合。主控模块还配置为接收电信号并控制巡检机器人禁止进入限制进入区域。
7、在本申请一个具体实现方式中,巡检机器人还包括报警模块。报警模块具有休眠状态和工作状态。主控模块还配置为在巡检机器人发生故障时,控制报警模块由休眠状态切换为工作状态并控制报警模块进行报警操作。
8、在本申请一个具体实现方式中,巡检机器人还包括视频模块。视频模块具有休眠状态和工作状态。主控模块还配置为在巡检指令中包括视频信息时,控制视频模块由休眠状态切换为工作状态,并控制视频模块借助激光点云技术和三维建模技术对核电站内的巡检区域或设备进行三维全景重建。
9、在本申请一个具体实现方式中,巡检机器人还包括运动控制模块。运动控制模块具有休眠状态和工作状态。主控模块还配置为在巡检指令中包括运动信息时,控制运动控制模块由休眠状态切换为工作状态,运动控制模块配置为将运动信息转化为巡检指令对应的运动输出。
10、在本申请一个具体实现方式中,巡检机器人还包括机器人本体、用于支撑机器人本体的支撑系统和用于驱动支撑系统的驱动系统。支撑系统包括两个动力轮和一个万向转向轮。驱动系统包括对应于两个动力轮的两个减速直流电机。主控模块还配置为控制两个减速直流电机的转速相同以使机器人本体直线行驶,或者,控制两个减速直流电机的转向相反以使机器人本体原地转向,或者,调节两个减速直流电机的转速差以使机器人本体自由转弯。
11、在本申请一个具体实现方式中,巡检机器人包括防辐射件和密封件中的至少一个,防辐射件设置在巡检机器人中至少一个模块的外围,密封件设置在巡检机器人上存在间隙的位置处。
12、本申请第二方面提供了一种巡检机器人,该巡检机器人为本申请第一方面的机器人系统中的巡检机器人。
技术特征:
1.一种核电站智能巡检的机器人系统,其特征在于,包括巡检机器人和与所述巡检机器人无线通信连接的远程控制平台,其中,
2.根据权利要求1所述的机器人系统,其特征在于,
3.根据权利要求1所述的机器人系统,其特征在于,
4.根据权利要求1所述的机器人系统,其特征在于,
5.根据权利要求1所述的机器人系统,其特征在于,
6.根据权利要求1所述的机器人系统,其特征在于,
7.根据权利要求1所述的机器人系统,其特征在于,
8.根据权利要求1至7中任一项所述的机器人系统,其特征在于,
9.根据权利要求1至7中任一项所述的机器人系统,其特征在于,
10.一种巡检机器人,其特征在于,所述巡检机器人为如权利要求1至权利要求9中任一项所述的机器人系统中的巡检机器人。
技术总结
本申请提供了一种核电站智能巡检的机器人系统和巡检机器人,该机器人系统包括巡检机器人和与巡检机器人无线通信连接的远程控制平台。远程控制平台配置为向巡检机器人发送用于在核电站内执行巡检任务的巡检指令。巡检机器人包括主控模块、传感器信息采集模块和电池供电模块。主控模块配置为接收巡检指令,并根据巡检指令中的巡检任务从传感器信息采集模块的多种传感器中选择巡检任务对应的传感器,并将巡检任务对应的传感器从休眠状态切换为工作状态。本申请通过设置巡检机器人的各模块和/或各传感器在未执行工作时处于休眠状态,在执行工作时处于工作状态,从而最大程度地节约了巡检机器人的功耗,因而延长了巡检机器人的待机时间和工作时间。
技术研发人员:邓丽,李孟,谭志皓
受保护的技术使用者:三门核电有限公司
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!