一种气动可变刚度的软体抓手
本发明涉及软体抓手,尤其涉及一种气动可变刚度的软体抓手。
背景技术:
1、传统的刚性抓手主要由刚性材料制成,安装在机械臂上进行大范围的抓取运动,依靠精确的控制实现对物体的抓取,但在参与抓取易碎、表面柔软的目标物时,刚性抓手容易对目标物造成损伤。软体抓手对各种形状、大小、重量、刚度的物体都有一定主动或被动的适应性,因此在参与抓取易碎、表面柔软的目标物时,可以更安全地抓握和操作易碎物体避免损伤。但由于制作软体抓手的柔性材料的特征,软体抓手存在刚度低、抓取能力差等问题,而且在执行多位置抓取操作时需要与机械臂配合,增大了操作控制难度。
2、公开号cn111791247a的中国发明专利,公开了一种变刚度线驱柔性抓手及其变刚度控制方法,利于电机旋转带动睫绳从而使手指弯曲,通过外接负压泵负压使柔性骨架的t形块结构顶端与柔性薄片的内表面相互接触,进而控制抓手刚度变化。该发明抓手的抓取牢靠,并可以完成易碎物品的抓取,但变刚度后抓手的刚度取决于t形块结构的刚度,刚度变化范围小,抓手适用范围小。
技术实现思路
1、本发明所要解决的技术问题是提供一种气动可变刚度的软体抓手,能够稳定实现变刚度抓取目标,并扩大软体抓手的工作空间。
2、为解决上述技术问题,本发明所采取的技术方案是:
3、一种气动可变刚度的软体抓手,其特征在于,包括:
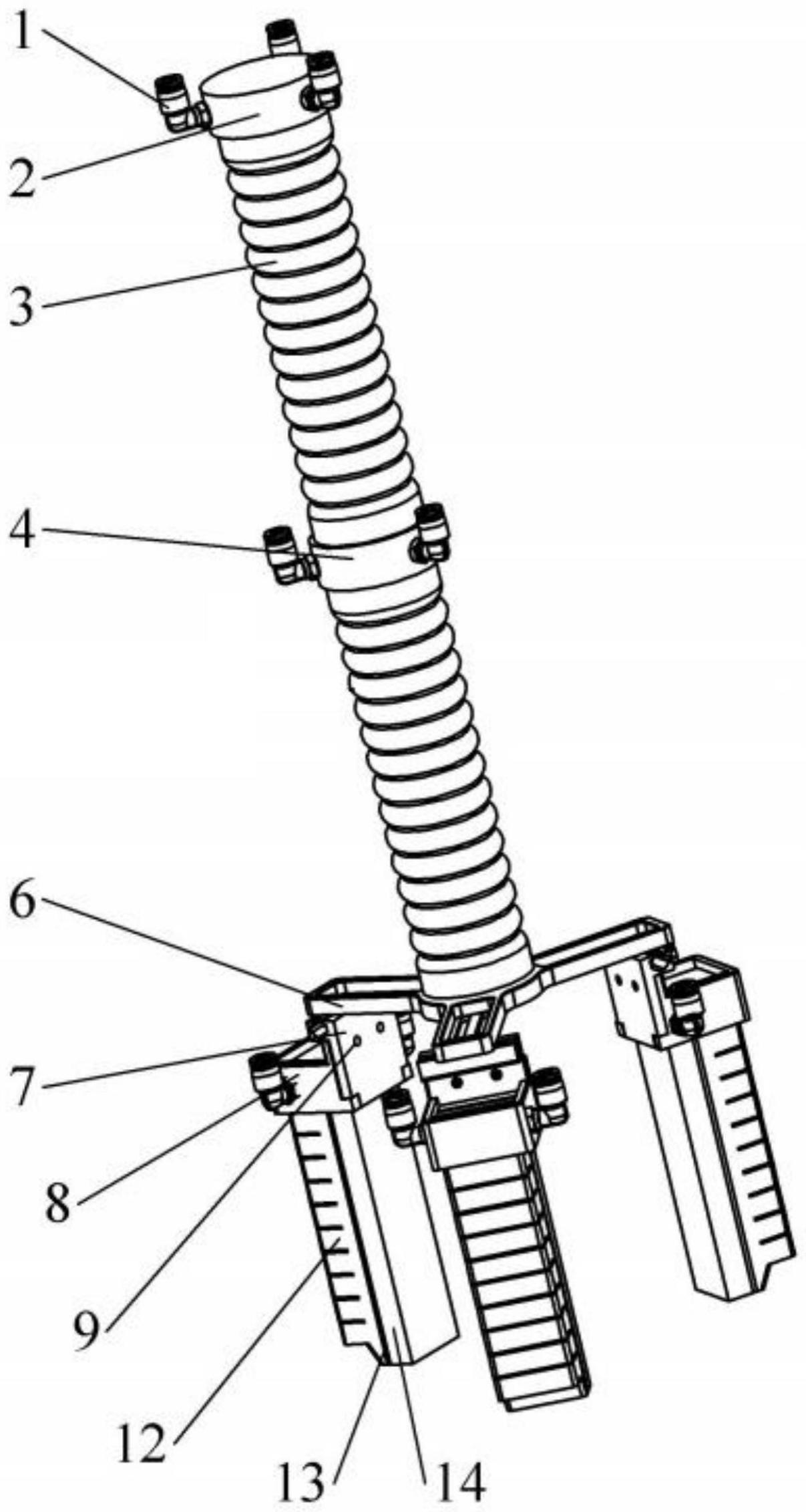
4、抓手,包括安装板,于安装板的下方环向均布有多个变刚度手指,每一变刚度手指包括一块应变限制板,于应变限制板的外侧固定有驱动气囊,所述驱动气囊内具有第一气道,于驱动囊的外侧具有一排凸出的气囊指,于气囊指的内部具有连通第一气道的伸缩腔,于应变限制板的内侧固定有变刚度气囊,所述变刚度气囊内部具有蜂巢状的支撑网格,将变刚度气囊的内腔分隔成多个巢腔,多个巢腔与第二气道连通,于每一巢腔内填充有球形的阻塞颗粒;及
5、柔性腕,其一端与安装板的上方固定,另一端与机械臂固定,所述柔性腕包括波纹管,于波纹管的内部随圆周均布有三个第三气道,每一第三气道连接一道气路。
6、进一步的技术方案在于,所述第三气道的断面为扇形,径向向外拱起。
7、进一步的技术方案在于,所述柔性腕包括上下两节单独的波纹管。
8、进一步的技术方案在于,所述应变限制板的两侧均通过胶粘与驱动气囊和变刚度气囊固定。
9、进一步的技术方案在于,所述安装板上具有以柔性腕为中心呈放射状均匀布置的多个滑槽,所述滑槽的数量与变刚度手指的数量相匹配,所述变刚度手指的上端滑接于滑槽内并能够锁定。
10、进一步的技术方案在于,所述变刚度手指的数量为三个。
11、进一步的技术方案在于,所述柔性腕中以10kpa的步长向第三气道内施压,最高80kpa的气压;所述变刚度手指中内以1.5kpa的步长向第一气道内施压,施加最高为30kpa的气压。
12、进一步的技术方案在于,所述阻塞颗粒的粒径为2~3mm,每一巢腔内的阻塞颗粒的填充量为80%~85%。
13、进一步的技术方案在于,所述应变限制板为2~3mm厚的聚二甲基硅氧烷板。
14、进一步的技术方案在于,所述波纹管长度为126mm,半径为35mm;所述驱动气囊长为150mm,宽为60mm,高为25mm;所述变刚度气囊长为150mm,宽为60mm,高为15mm。
15、采用上述技术方案所产生的有益效果在于:
16、软体抓手抓取过程先由第一气道对驱动气囊增压,变刚度手指弯曲,再经由第二气道对变刚度气囊施加负压,使阻塞颗粒排列紧密,颗粒间摩擦力增大,实现自适应变刚度。并且,采用蜂巢网格支撑结构与颗粒阻塞结合,在实现阻塞变刚度的同时避免颗粒重组和堆积现象,同时柔性支撑结构对目标物还有包裹性,增加抓手的形状自适应能力。
17、柔性腕采用波纹管结构,其内部随圆周均布有三个第三气道,每一第三气道连接一道气路,通过控制第三气道内气体压力来控制柔性腕偏转状况和伸长量,当对一个或两个第三气道进行充气,柔性腕产生偏转运动,当对三个扇形气腔进行充气,且空腔内气压相同时,柔性腕产生拉伸运动,从而产生良好偏转性能和伸长性能,增加抓手的工作空间和灵活度。
技术特征:
1.一种气动可变刚度的软体抓手,其特征在于,包括:
2.根据权利要求1所述的气动可变刚度的软体抓手,其特征在于,所述第三气道(3-2)的断面为扇形,径向向外拱起。
3.根据权利要求1所述的气动可变刚度的软体抓手,其特征在于,所述柔性腕包括上下两节单独的波纹管(3)。
4.根据权利要求1所述的气动可变刚度的软体抓手,其特征在于,所述应变限制板(13)的两侧均通过胶粘与驱动气囊(12)和变刚度气囊(14)固定。
5.根据权利要求1所述的气动可变刚度的软体抓手,其特征在于,所述安装板(6)上具有以柔性腕为中心呈放射状均匀布置的多个滑槽(6-1),所述滑槽(6-1)的数量与变刚度手指的数量相匹配,所述变刚度手指的上端滑接于滑槽(6-1)内并能够锁定。
6.根据权利要求1所述的气动可变刚度的软体抓手,其特征在于,所述变刚度手指的数量为三个。
7.根据权利要求1所述的气动可变刚度的软体抓手,其特征在于,所述柔性腕中以10kpa的步长向第三气道(3-2)内施压,最高80kpa的气压;所述变刚度手指中内以1.5kpa的步长向第一气道(10)内施压,施加最高为30kpa的气压。
8.根据权利要求1所述的气动可变刚度的软体抓手,其特征在于,所述阻塞颗粒(14-2)的粒径为2~3mm,每一巢腔内的阻塞颗粒(14-2)的填充量为80%~85%。
9.根据权利要求1所述的气动可变刚度的软体抓手,其特征在于,所述应变限制板(13)为2~3mm厚的聚二甲基硅氧烷板。
10.根据权利要求1所述的气动可变刚度的软体抓手,其特征在于,
技术总结
本发明公开了一种气动可变刚度的软体抓手,包括抓手和柔性腕。抓手具有多个变刚度手指,每一变刚度手指包括一块应变限制板,于应变限制板的外侧固定有驱动气囊,内侧固定有变刚度气囊,变刚度气囊内部具有蜂巢状的支撑网格,将变刚度气囊的内腔分隔成多个巢腔,多个巢腔与第二气道连通,于每一巢腔内填充有球形的阻塞颗粒,软体抓手抓取过程先由第一气道对驱动气囊增压,变刚度手指弯曲,再经由第二气道对变刚度气囊施加负压,使阻塞颗粒排列紧密,颗粒间摩擦力增大,实现自适应变刚度。柔性腕包括波纹管,于波纹管的内部随圆周均布有三个第三气道,使柔性腕柔能产生良好偏转性能和伸长性能。
技术研发人员:朱姿娜,万仁宇,曾阳浩,崔国华
受保护的技术使用者:上海工程技术大学
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!