一种无框车门装配系统及无框车门装配方法与流程
本发明涉及车辆装配,更进一步涉及一种无框车门装配系统。此外,本发明还涉及一种无框车门装配方法。
背景技术:
1、随着我国人民生活水平的不断提高,采用无框车门技术的汽车逐渐走进了消费者的视野。无框车门因为非常优雅的外观,受到了消费者的追捧。生产无框车门逐渐从之前仅限高端品牌高端车型的一两款,变成越来越多的中端车型的标配。
2、由于无框车门的玻璃伸出车门的部分没有导轨约束,因此无框车门玻璃的安装其工艺要求较高,传统的装配一直都采用人工的装配方式,这大大的浪费了人力与时间。
3、对于本领域的技术人员来说,如何在无框车门装配过程中节省人工、提高效率,同时实现无框车门玻璃与车门的精准配合,是目前需要解决的技术问题。
技术实现思路
1、本发明提供一种无框车门装配系统,能够自动化地精准调节玻璃与车门的相对位置,满足无框玻璃的安装精度,具体方案如下:
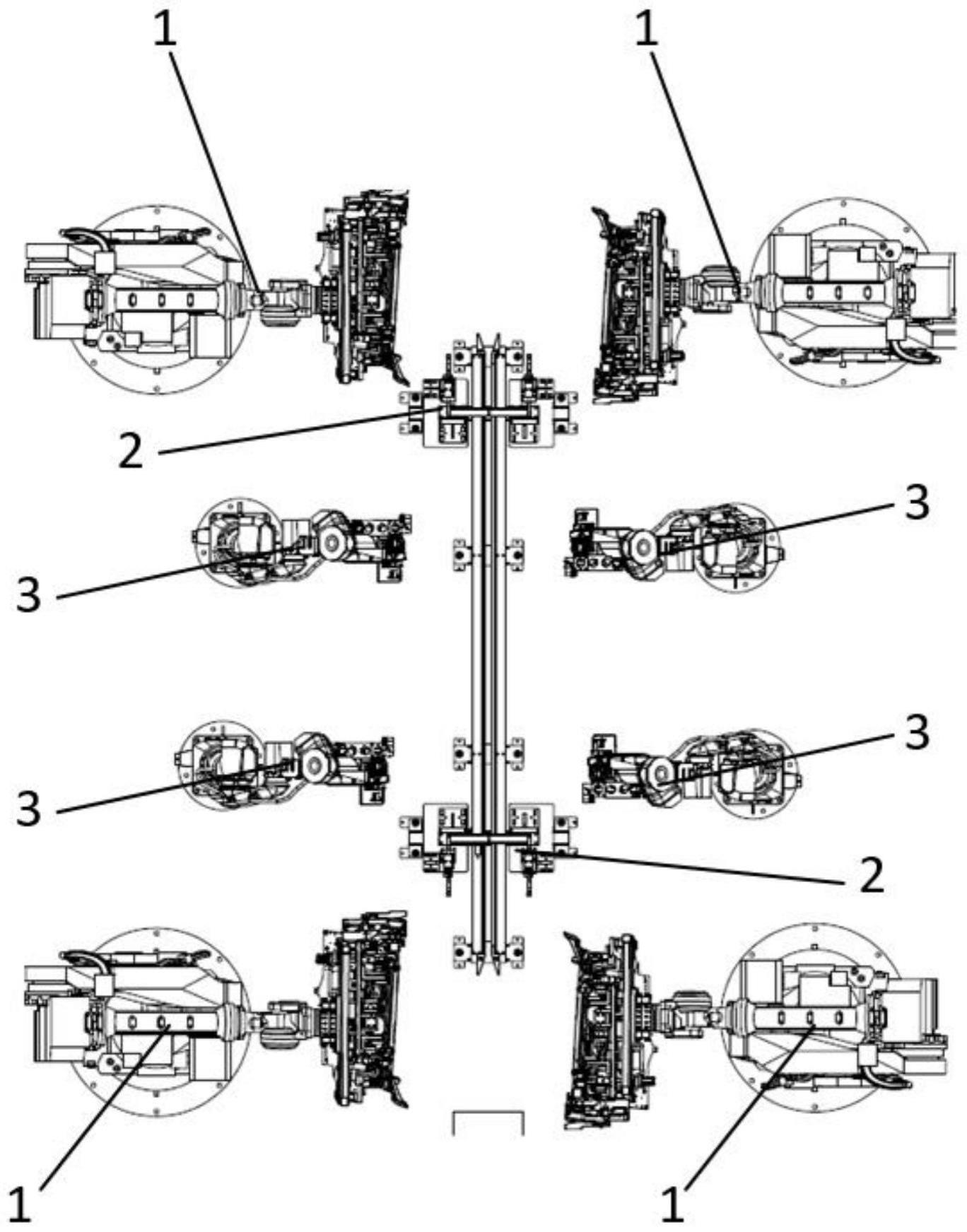
2、一种无框车门装配系统,包括用于定位并装配玻璃的大机器人组件和用于固定车门的车门固定组件;
3、所述大机器人组件包括大机械臂、玻璃定位工装和车门定位工装,所述玻璃定位工装和所述车门定位工装一体式相对固定,并安装于所述大机械臂;
4、所述车门定位工装能够相对于待安装玻璃的车门定位固定,所述玻璃定位工装用于夹持并调节玻璃的位置,使玻璃与车门之间形成精准定位。
5、可选地,所述玻璃定位工装包括底座框架,所述底座框架上安装玻璃吸盘、真空发生器、吸盘x向调整驱动器、吸盘y向调整驱动器、吸盘z向调整驱动器、玻璃x向定位、玻璃z向定位、玻璃y向支撑;所述真空发生器使所述玻璃吸盘产生负压从而吸附玻璃;所述吸盘x向调整驱动器、所述吸盘y向调整驱动器、所述吸盘z向调整驱动器配合调节所述玻璃吸盘的空间位置,使玻璃的边缘到达所述玻璃x向定位和所述玻璃z向定位,玻璃的表面到达所述玻璃y向支撑,实现玻璃三维定位。
6、可选地,所述底座框架上设置x向玻璃位移传感器、y向玻璃位移传感器、z向玻璃位移传感器,所述x向玻璃位移传感器和所述z向玻璃位移传感器用于检测玻璃的边缘位置,所述y向玻璃位移传感器用于检测玻璃的表面位置。
7、可选地,所述底座框架上设置用于驱动所述玻璃x向定位调节位置的玻璃x向定位翻转驱动器、用于驱动所述玻璃z向定位调节位置的玻璃z向定位翻转驱动器、用于驱动所述玻璃y向支撑调节位置的玻璃y向支撑驱动器。
8、可选地,所述玻璃x向定位和所述玻璃z向定位均为圆柱形,两者通过圆柱侧面接触定位玻璃的侧边;
9、所述玻璃y向支撑接触支撑玻璃的表面。
10、可选地,所述车门定位工装包括车门底板,所述车门底板上安装车门定位粗导向、车门支撑块和车门定位销,所述车门定位粗导向设置导向斜面,使车门在靠近所述车门底板的过程中受到导向实现粗定位;所述车门支撑块用于支撑车门从而限定车门与所述车门底板之间的间距;
11、所述车门定位销用于在车门到位时插入车门实现精定位。
12、可选地,所述车门定位销上设置定位销勾爪,定位销勾爪气缸驱动所述车门定位销和所述定位销勾爪同步转动,从而锁定车门。
13、可选地,所述车门底板上安装摆动夹爪、摆动夹紧气缸、翻转夹爪、翻转夹紧气缸、到位传感器;
14、所述到位传感器用于检测与车门的间距从而判断车门是否到位,所述摆动夹紧气缸驱动所述摆动夹爪、所述翻转夹紧气缸驱动所述翻转夹爪从而紧压固定车门的不规则孔位。
15、可选地,所述摆动夹爪的转动轴垂直于所述车门底板的表面,所述翻转夹爪的转动轴平行于所述车门底板的表面。
16、可选地,还包括用于视觉定位与螺纹拧紧的小机器人组件,所述包括小机械臂、2d视觉相机、3d视觉相机、电动拧紧枪和光源;
17、所述小机械臂用于驱动,以使所述2d视觉相机、所述3d视觉相机、所述电动拧紧枪和所述光源到达操作位置。
18、本发明还提供一种无框车门装配方法,应用于上述任一项所述的无框车门装配系统,包括:
19、第一步:小机械臂带动3d视觉相机,首先对玻璃拍照至少三处定位点位,然后对车门拍照定位销孔点位,将数据发回plc;
20、第二步:plc整理数据后,根据视觉数据控制对应车型的大机器人组件到达抓取准备位置;
21、第三步:大机器人组件控制设备向车门推进,首先车门沿所述车门定位粗导向前进,导向到位后再用车门定位销进行定位;所述车门定位销插进定位销孔后,定位销勾爪气缸缩回带动定位销勾爪做90°转动锁紧压住车门;
22、第四步:翻转夹爪与摆动夹爪穿过车门对应的不规则孔位,随后摆动夹紧气缸、翻转夹紧气缸分别控制所述翻转夹爪与所述摆动夹爪夹紧车门,从而完全固定夹紧车门;
23、第五步:玻璃x向定位翻转驱动器伸出,同时玻璃z向定位翻转驱动器随之闭合,玻璃x向定位及玻璃z向定位翻转至限位位置;玻璃y向支撑驱动器伸出带动玻璃y向支撑伸出至限位位置;
24、第六步:玻璃吸盘靠近预装于车门的玻璃,吸盘y向调整驱动器伸出将玻璃吸住,进而带动所述玻璃吸盘及玻璃缩回,直至玻璃抵住所述玻璃y向支撑,y向限位信号灯亮起;
25、第七步:使玻璃先后接触玻璃x向定位和玻璃z向定位)两者,依次实现z向和z向定位;
26、第八步:小机器人组件带动2d视觉相机依次检测各个螺钉位置,根据拍照数据控制电动拧紧枪拧紧螺钉;
27、第九步:所述小机器人组件离开拧紧位置,进入待机位;
28、第十步:所述大机器人组件处的真空发生器破真空,所述玻璃吸盘缩回;定位销勾爪、摆动夹爪和翻转夹爪松开;
29、第十一步:所述大机器人组件回到安全位,同时所述小机器人组件用所述3d视觉相机拍照跟模板对比,判断是否合格;
30、第十二步:所有工序完成,反馈信号到机运线控制端,机运线处夹紧气缸松开车门固定组件,机运线放行准备下一次安装。
31、本发明提供一种无框车门装配系统,包括用于定位并装配玻璃的大机器人组件和用于固定车门的车门固定组件;装配时将车门固定在车门固定组件上,通过大机器人组件的大机械臂驱动,由玻璃定位工装定位玻璃的位置,由车门定位工装定位车门的位置,使玻璃与车门的相对位置精准调节,玻璃与车门之间形成精准定位,提升玻璃装配的精度,从而提高玻璃装配的自动化水平。本发明的无框车门装配方法可以实现上述装配所达到的效果。
技术特征:
1.一种无框车门装配系统,其特征在于,包括用于定位并装配玻璃的大机器人组件(1)和用于固定车门的车门固定组件(2);
2.根据权利要求1所述的无框车门装配系统,其特征在于,所述玻璃定位工装(12)包括底座框架(1201),所述底座框架(1201)上安装玻璃吸盘(1202)、真空发生器、吸盘x向调整驱动器(1204)、吸盘y向调整驱动器(1205)、吸盘z向调整驱动器(1206)、玻璃x向定位(1207)、玻璃z向定位(1209)、玻璃y向支撑(1211);所述真空发生器使所述玻璃吸盘(1202)产生负压从而吸附玻璃;所述吸盘x向调整驱动器(1204)、所述吸盘y向调整驱动器(1205)、所述吸盘z向调整驱动器(1206)配合调节所述玻璃吸盘(1202)的空间位置,使玻璃的边缘到达所述玻璃x向定位(1207)和所述玻璃z向定位(1209),玻璃的表面到达所述玻璃y向支撑(1211),实现玻璃三维定位。
3.根据权利要求2所述的无框车门装配系统,其特征在于,所述底座框架(1201)上设置x向玻璃位移传感器(1213)、y向玻璃位移传感器(1214)、z向玻璃位移传感器(1215),所述x向玻璃位移传感器(1213)和所述z向玻璃位移传感器(1215)用于检测玻璃的边缘位置,所述y向玻璃位移传感器(1214)用于检测玻璃的表面位置。
4.根据权利要求3所述的无框车门装配系统,其特征在于,所述底座框架(1201)上设置用于驱动所述玻璃x向定位(1207)调节位置的玻璃x向定位翻转驱动器(1208)、用于驱动所述玻璃z向定位(1209)调节位置的玻璃z向定位翻转驱动器(1210)、用于驱动所述玻璃y向支撑(1211)调节位置的玻璃y向支撑驱动器(1212)。
5.根据权利要求4所述的无框车门装配系统,其特征在于,所述玻璃x向定位(1207)和所述玻璃z向定位(1209)均为圆柱形,两者通过圆柱侧面接触定位玻璃的侧边;
6.根据权利要求1所述的无框车门装配系统,其特征在于,所述车门定位工装(13)包括车门底板(1301),所述车门底板(1301)上安装车门定位粗导向(1302)、车门支撑块(1303)和车门定位销(1304),所述车门定位粗导向(1302)设置导向斜面,使车门在靠近所述车门底板(1301)的过程中受到导向实现粗定位;所述车门支撑块(1303)用于支撑车门从而限定车门与所述车门底板(1301)之间的间距;
7.根据权利要求6所述的无框车门装配系统,其特征在于,所述车门定位销(1304)上设置定位销勾爪(1305),定位销勾爪气缸(1306)驱动所述车门定位销(1304)和所述定位销勾爪(1305)同步转动,从而锁定车门。
8.根据权利要求7所述的无框车门装配系统,其特征在于,所述车门底板(1301)上安装摆动夹爪(1311)、摆动夹紧气缸(1307)、翻转夹爪(1308)、翻转夹紧气缸(1309)、到位传感器(1310);
9.根据权利要求8所述的无框车门装配系统,其特征在于,所述摆动夹爪(1311)的转动轴垂直于所述车门底板(1301)的表面,所述翻转夹爪(1308)的转动轴平行于所述车门底板(1301)的表面。
10.根据权利要求1至9任一项所述的无框车门装配系统,其特征在于,还包括用于视觉定位与螺纹拧紧的小机器人组件(3),所述包括小机械臂(31)、2d视觉相机(32)、3d视觉相机(33)、电动拧紧枪(34)和光源(35);
11.一种无框车门装配方法,应用于权利要求1至10任一项所述的无框车门装配系统,其特征在于,包括:
技术总结
本发明公开一种无框车门装配系统,涉及车辆装配技术领域,包括用于定位并装配玻璃的大机器人组件和用于固定车门的车门固定组件;装配时将车门固定在车门固定组件上,通过大机器人组件的大机械臂驱动,由玻璃定位工装定位玻璃的位置,由车门定位工装定位车门的位置,使玻璃与车门的相对位置精准调节,玻璃与车门之间形成精准定位,提升玻璃装配的精度,从而提高玻璃装配的自动化水平。本发明的无框车门装配方法可以实现上述装配所达到的效果。
技术研发人员:谭旭东,高健,孙令强
受保护的技术使用者:固智机器人(上海)有限公司
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!